18. Уравнения ад. Эквивалентная схема замещения ад.
По 2 з-ну Кирхгофа, составим уравнения равновесия напряжений для статора и ротора. Воспользуемся активными сопротивлениями обмотки статора (ОС) и ротора: (ОР)(r1 и r2) и индуктивными сопрот-ями рассеяния ОС и ОР:(x1 и x2)
Ů1+Ė1+ Ėσ1=İ1r1; Ů1= -Ė1+İ1r1+j İ1x1 (1) – для статора; Ė2s= İ2r2+j İ2x2 - для ротора
Ė2s= Ė2*s; X2=ωLσ2=2πf1 Lσ2; X2s=ω2Lσ2=2πf2 L σ2=x2*s
Ė2=İ2r2/s+j İ2x2 (2); r2/s – это приведение вращающегося ротора к неподвижному.
Приведение АМ.
Для упрощения расчетного исследования и построения ВД ОР приводят по числу витков и числу фаз к ОС.
В общем случае:W1kоб1≠ Wkоб2, m2≠m1,что затрудняет процесс исследования АМ. В АМ вводят новое число фаз m’2=m1 и новое число витков W1kоб1≠ W'2k'об2.
Уравнение
равновесия МДС:
 1=
0-
2,
где
0
–МДС
намагнич. на ХХ,
1
–
МДС ОС,
2
–
МДС ОР.
1=
0-
2,
где
0
–МДС
намагнич. на ХХ,
1
–
МДС ОС,
2
–
МДС ОР.
(m1/2)*1.8* (W1kоб1/p)* İ1= (m1/2)*1.8* (W1kоб1/p)* İ0-(m2/2)*1.8* (W2kоб2/p)* İ2 /(1)
İ1=İ0- m2W2 kоб2/m1W1 kоб1*İ2 ; k I= m1W1kоб1 / m2W2 kоб2- коэф-нт трансф. по току.
I'2= I2/ k I-приведен. ток ОР
кE=E1/E2= W1 kоб1 / W2 kоб2-коэф. трансф. по ЭДС для АМ
Ů1=-Ė1+İ1r1+j İ1x1 (1)
Ė’2=İ'2r'2/s+j İ'2x'2 (2), s-скольжение
İ1= İ0- İ'2 (3), İ'2 – приведенный ток ОР
Используя эти 3 уравнения, строим сх. Замещения АМ.
r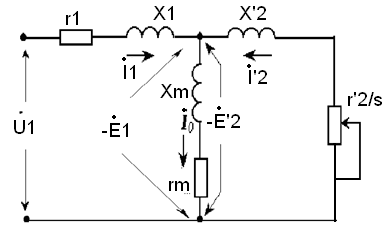 m-активное
сопр. соотв. потерям в стали статора и
ротора; xm-инд.
сопр. взаимн. инд. соотв. потоку Φm
m-активное
сопр. соотв. потерям в стали статора и
ротора; xm-инд.
сопр. взаимн. инд. соотв. потоку Φm
r'2 и x'2 – приведенные активное и индуктивное сопротивления ОР
zm-полное сопр-ие намагничивания
r1+jx1=z1; r2'/s+jx'2=z'2; rm+jxm=zm;
-E1=-E'2= I0*Zm;
Запишем 3 уравнения в другом виде:
Ů1=İ0zm+İ1z1 (1); 0=İ0zm+ İ'2z'2 (2), найдем İ'2
Ů1= İ1 (zm + z1) İ'2zm; 0= İ1zm +İ'2(zm + z'2)
İ'2=- Ů1zm /( zm + z1) (zm + z'2)- z2m=-Ů1/( z1z'2/ zm + z1+ z'2)=- Ů1/(z1+ z'2 (1+ z1/ zm))
Ċ1=1+ z1/ zm – комплексный коэф-т.
Ċ1=1+ x1/ xm = 1.02…1.1 => İ'2= - Ů1/(( r1 + jx1)+C1(r2'/s + jx'2))
Действующее значение тока:
İ'2=- Ů1/(( r1+ C1 r2'/s)2+(x1+C1 x'2)2)1/2
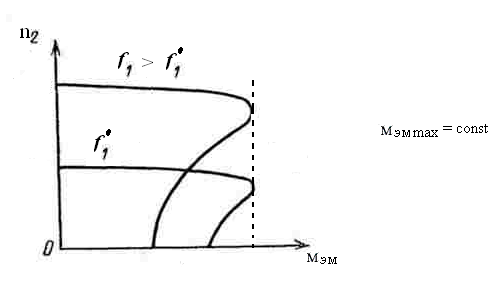
19 Способы регулирования частоты (скорости) вращения ад.
Наиболее распространены следующие способы регулирования скорости асинхронного двигателя: изменение дополнительного сопротивления цепи ротора, изменение напряжения, подводимого к обмотке статора, двигателя изменение частоты питающего напряжения, а также переключение числа пар полюсов.
, p, s – можно менять в АД
= var изменение частоты питающего напряжения
 ,
,
 =>
пренебрежем =>
=>
пренебрежем =>

 (насыщение)
=>
(насыщение)
=>
 ,
что плохо!
,
что плохо!
 (нет
перегрузочной способности):
(нет
перегрузочной способности):

Этот
способ приемлем только когда
 ,
U
– напряжение на статоре.
,
U
– напряжение на статоре.
Регулирование скорости проходит с постоянным значением момента.
p = var (
 )
переключение числа пар полюсов.
)
переключение числа пар полюсов.
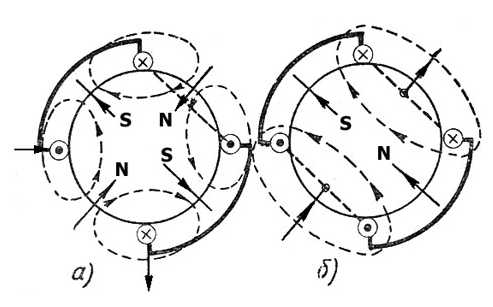
На рис.а. соединение параллельное, число пар полюсов (р) равно 2.
На рис.б. соединение последовательнее, число пар полюсов равно 1.
Изменение
числа пар полюсов или изменение синхронной
скорости вращения поля статора создается
несколькими обмотками статора. Если в
пазы статора заложить несколько обмоток,
рассчитанные на разные скорости
 ,
то увеличатся массово-габаритные
показатели машины. Чтобы снизить
массово-габаритные показатели используется
одна обмотка статора, у которой в части
катушек изменяется направление тока.
,
то увеличатся массово-габаритные
показатели машины. Чтобы снизить
массово-габаритные показатели используется
одна обмотка статора, у которой в части
катушек изменяется направление тока.
Переход от последовательного соединения к параллельному увеличивает скорость . Такие машины, рассчитанные на несколько p называются многоскоростными.
Обычно они 2х-скоростные: звезда/звезда-звезда; треугольник/звезда-звезда
В многоскоростных машинах ротор обязательно короткозамкнутый, т.к. только в этом случае на ротор устанавливается такое же число полюсов, как и на статор.
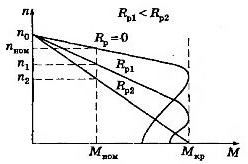
3) Регулирование частоты вращения асинхронного двигателя путем введения резисторов в цепь ротора
Введение резисторов в цепь ротора приводит к увеличению потерь мощности и снижению частоты вращения ротора двигателя за счет увеличения скольжения, поскольку n = nо (1 - s).
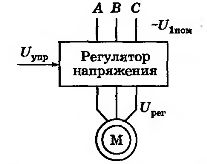
4) Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Изменение напряжения, подводимого к обмотке статора асинхронного двигателя, позволяет регулировать скорость с помощью относительно простых технических средств и схем управления. Для этого между сетью переменного тока со стандартным напряжением U1ном и статором электродвигателя включается регулятор напряжения.
При регулировании частоты вращения асинхронного двигателя изменением напряжения, подводимого к обмотке статора, критический момент Мкр асинхронного двигателя изменяется пропорционально квадрату подводимого к двигателю напряжения Uрег, а скольжение от Uрег не зависит.