


9.3 Автоматизация оперативного склада накопителя колесных пар гравитационного типа
9.3.1 Технологический процесс работы оперативного склада-накопителя колесных пар гравитационного типа
С грузового автомобиля колесные пары при помощи консольного крана устанавливаются на трансбордерную тележку оператором, которому известны параметры данной колесной пары. Оператор склада должен нажать на стационарной панели кнопку, которая соответствует той эстокаде, на которую должна быть установлена колесная пара в зависимостей от ее параметров. Трансбордерная тележка после такого действия оператора приводится в движение при помощи электропривода, через цепную передачу.
Управление электродвигателем происходит через тиристорный преобразователь. На валу электродвигателя находится датчик угловых перемещений, который отсчитывает количество оборотов вала требуемых для перемещения трансбордерной тележки к необходимой эстокаде. Перед эстокадой вращение электродвигателя уменьшается через тиристорный преобразователь и до рельсов эстокады трансбордерная тележка доходит при пониженной скорости. Как только трансбордерная тележка останавливается, включается воздухораспределитель (ВР1) прямой ход, и шток пневмоцилиндра (ПЦ1 показанного на рис.9.3.1) приводит действие механизм отпирания колесной пары, после чего она скатывается на эстокаду. После того как колесная пара поступит на эстокаду включится воздухораспределитель (ВР1) обратный ход и шток пневмоцилиндра (ПЦ1) сядет и трансбордерная тележка вернется в первоначальное положение.
При необходимости замены колесной пары на вагоне, в склад поступает информация о ее параметрах. Оператор склада должен нажать кнопку на стационарной панели, которая соответствовать той эстокаде, на которой находятся колесные пары с необходимыми параметрами. Трансбордерная тележка после такого действия оператора приводится в движение при помощи электропривода, через цепную передачу.
Управление электродвигателем происходит через тиристорный преобразователь. На валу электродвигателя находится датчик угловых перемещений, который отсчитывает количество оборотов вала требуемых для перемещения трансбордерной тележки к необходимой эстокаде. Перед эстокадой вращение электродвигателя уменьшается через тиристорный преобразователь и до рельсов эстокады трансбордерная тележка доходит при пониженной скорости. Как только трансбордерная тележка останавливается, включается воздухораспределитель (ВР2), и шток пневмоцилиндра (ПЦ2) приводит в действие механизм отпирания колесной пары, после чего она скатывается на трансбордерную тележку. После подачи колесной пары на трансбордерную тележку шток под действием пружины пневмоцилиндра (ПЦ2) садится и запирает механизм отпирания колесной пары, препятствуя дальнейшей подачи колесных пар. Затем трансбордерная тележка подъезжает к месту выгрузки, откуда колесная пара забирается дизельным автопогрузчиком.
9.3.2 Выбор элементов управления
Таблица 1 - Наименование базового контроллерного оборудования
Позиция |
Функция |
Наименование |
Кол.входов/выходов в плате |
Требуемое кол каналов. |
Кол.плат |
1 |
2 |
3 |
4 |
5 |
6 |
1 |
Контроллер |
SMART2-BASE |
3 |
7 |
3 |
2 |
Процессор |
SM2-CPU |
- |
|
1 |
3 |
|
|
|
|
|
4 |
Дискретного вывода |
SM-Dout |
8 |
24 |
3
|
Продолжение таблицы 1
1 |
2 |
3 |
4 |
5 |
6 |
5 |
Аналогового ввода |
SM-ADC1 |
1 |
2 |
1 |
6 |
Аналогового вывода |
SM-DAC1 |
1 |
4 |
1 |
7 |
Модуль источника питания |
SMART2-PSU |
- |
|
1 |
Описание выбранного контроллерного оборудования:
1. Базовый блок SMART2-BASE может быть использован в качестве базового процессорного блока контроллера SMART2 или как блок расширения ввода-вывода контроллера SMART2 или SMART I/O.
При использовании SMART2-BASE в качестве базового блока, в первый слот устанавливается модуль процессора SM-CPU*, а во второй слот модуль источника питания SM-DC24*. Допускается также питание базового блока от стабилизированного внешнего источника питания =5В без использования модуля SM-DC24
Таблица 2 – Характеристика блока SMART2-BASE
Характеристики |
|
Функция |
может использоваться для формирования базового процессорного блока, а так же для расширения ввода-вывода |
Количество слотов |
3 |
Количество клемм на слот |
14 |
Ток через клемму |
3А |
Продолжение таблицы 2 |
|
Контроллер с встроенным ПО |
MC68HC705C8A |
Частота контроллера |
4 MГц |
Межмодульный интерфейс |
SPI – 2 Мгц |
Общие характеристики |
|
Энергопотребление |
25 мВт |
Температурный диапазон |
0С…+70С (основной) -40С…+85С (расширенный) -55С…+85С (хранение) |
Влажность |
5%…95% (без конденсации) |
2. SM2-CPU - модуль центрального процессора.
Таблица 3 – Характеристика блока SM2-CPU
Центральный процессор |
|
Тип микропроцессора |
MC68LC302 |
Тактовая частота |
20MГц |
Память |
|
SM2-CPU-512 |
512 кБайт DRAM |
SM2-CPU-1.5 |
1,5 МБайт DRAM |
FLASH |
1 МБайт |
SRAM |
256 кБайт |
Системное ПО |
|
Операционная система |
OS-9 |
Продолжение таблицы 3 |
|
Система разработки прикладного ПО |
ISaGRAF (61131.3) |
Интерфейсы |
|
Один полномодемный RS232 (терминальный порт) |
|
Один RS232 (дополнительно) |
|
CMI интерфейс для коммуникационных модулей |
|
Поддержка промышленных сетей |
|
PROFIBUS DP |
|
MODBUS |
|
CAN |
|
ETHERNET |
|
Общие характеристики |
|
Вес |
52г. |
Энергопотребление |
650мВт (мин.), 1Вт (макс.) |
Температурный диапазон |
0С…+70С (основной) -40С…+85С (расширенный) -55С…+85С (хранение) |
Влажность |
5%…95% (без конденсации) |
Модуль SMART2-CPU* является основным элементом контроллера SMART2 и предназначен для организации базового процессорного блока контроллера на основе блока SMART2-BASE. При этом SMART2-CPU* устанавливается в первый слот блока SMART2-BASE.
Модуль выполнен на базе микропроцессора MC68LC302, 20 Мгц (Motorola). В качестве системного ПО в модуле используется многозадачная операционная система реального времени OS-9. Прикладное ПО может разрабатываться при помощи инструментального пакета ISaGRAF или кроссреды разработки приложений HAWK.
Модуль имеет CMI-интерфейс коммуникационных модулей, которые устанавливаются непосредственно на SMART2-CPU*. Номенклатура коммуникационных модулей включает в себя модули поддержки сетей PROFIBUS-DP, СAN и ETHERNET.
3. SM-DOUT1 - модуль с 8 оптоизолированными выходами 24V DC
Таблица 4 – Характеристика блока SM-DOUT1
-
Выход
Функция
8 цифровых выходов
Организация
2 независимые группы
Выходное напряжение
24V DC 10%
Выходной ток
500mA (постоянно на канал)
Выходная частота
1kHz (прямоугольные волны)
Задержка переключения ON
3s (сопротивление 24V DC)
Задержка переключения OFF
130s (сопротивление 24V DC)
Выход ‘ON’
внутренний логический ‘0’
Выход ‘OFF’
внутренняя логическая ‘1’
Защита от перегрузок
Непрерывная
35V DC
Кратковременная
90V/10s
Общее
Индуктивная нагрузка
диодная защита
Продолжение таблицы 4
Изоляция
2.5kV, оптоизоляция от системы
Передняя панель
8 желтых светодиодов (вкл. когда выход ‘ON’)
Энергопотребление
270mW max, 5mW min
Вес
70g
Температурный диапазон
0С +70С, -40С +85С, -55С +85С
Влажность
5% 95% (без конденсации)
SM-DOUT1 обеспечивает восемь оптоизолированных цифровых выхода 24V в 2 независимых группах. Максимальный вывод, переключающей частоты ограничен 1кГц (квадратная волна) с выводом в состояние ВКЛЮЧЕН, когда в систему выходит логический '0'. Максимальный ток выхода ограничен 500mA (нагрузки имеющий сопротивление) и условие это было сделано, чтобы обслужить индуктивные нагрузки. Интерфейс пользователя реализован 8 желтыми светодиодами (1 в канал вывода) которые включаются, когда выход включен.
4. SM-DAC1 модуль аналогового вывода (2 или 6 аналоговых выхода)
Таблица 5 – Характеристика блока SM-DAC1
Выход |
|
Функция |
2 или 6 аналоговых выхода |
Диапазон выходного сигнала |
10В или 0…20мA |
Максимальный выходной ток |
2мA (для версии 10В) |
ЦАП |
|
Разрядность |
12 бит |
Повторяемая точность |
11 бит |
Время преобразования |
75мкс (на канал) |
Продолжение таблицы 5 |
|
Общие характеристики |
|
Изоляция |
1000В оптоизоляция от системы |
Внешнее питание |
24В DC (-10%…+20%) |
Передняя панель |
2 красных светодиода (программируемые пользователем) |
EEPROМ |
256 байт EEPROМ для данных калибровки |
Энергопотребление |
600мВт макс. (10В) 400мВт мин. (0…20мA) |
Вес |
70г. |
Температурный диапазон |
0С…+70С (основной) -40С…+85С (расширенный) -55С…+85С (хранение) |
Влажность |
5%…95% (без конденсации) |
Модуль SM-DAC1 имеет 2 или 6 аналоговых выхода и обеспечивает цифро-аналоговое преобразование 12-ти разрядного цифрового кода в выходной сигнал тока или напряжения.
На передней панели расположены 2 светодиода, программируемых пользователем.
5. SMART2-PSU модули источников питания для SMART2-BASE
Таблица 6 – Характеристика блока SMART2-PSU
SM-DC24В1 |
|
Вход |
18В…36В |
Выход |
=5В, 2А(макс.) |
SM-DC24В2 |
|
Вход |
18В…36В |
Выход |
=5В, 1А(макс.) |
SM-DC24В3 |
|
Вход |
18В…36В |
Выход |
=5В, 0.6А(макс.) |
Дискретный выход |
|
Количество каналов |
4 выхода с общим питанием |
Выходное напряжение |
24В DC 10% |
Выходной ток |
500мA на канал |
Выходная частота |
1кГц (меандр) |
Изоляция |
2500В оптоизоляция от системы |
Общие характеристики |
|
Вес |
70г. |
Гальваническая изоляция по питанию |
500В |
Энергопотребление |
30мВт (мин.), 400мВт (макс.) |
Температурный диапазон |
0С...+70С (основной) -40С...+85С (расширенный) -55С...+85С (хранение) |
Продолжение таблицы 6 |
|
Влажность |
5%...95% (без конденсации) |
Модуль SM-DC24* предназначен для питания контроллера SMART2 от нестабилизированного источника питания постоянного тока напряжением 18 - 36 В.
Модуль устанавливается во второй слот SMART2-BASE (после SM2-CPU*).
Дополнительно модуль имеет 4 дискретных выхода, аналогичных выходам модуля SM-DOUT1
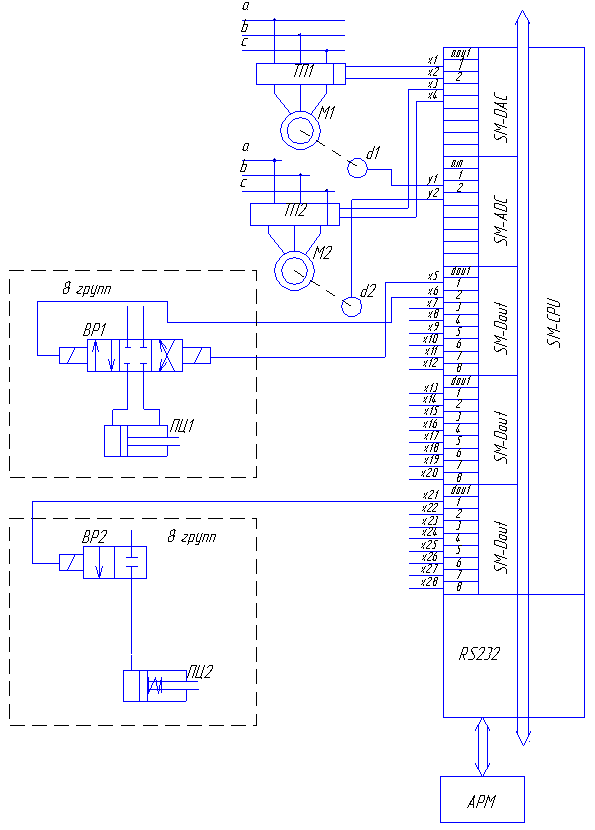
Рис.9.3.1 Схема автоматизации склада-накопителя колесных пар гравитационного типа.