

Исследование динамических характеристик газореактивного исполнительного устройства с управлением на выходе.
Газореактивное исполнительное устройство представляет собой сложную динамическую систему. При проектировании таких систем главной задачей инженерного расчета является:
Определение параметров предсопловой полости – геометрических размеров сопла, площади впускного отверстия (ее эквивалентный диаметр);
Определение геометрических размеров управляющих устройств – площадей впуска и выпуска в рабочую полость и геометрических размеров подвижного элемента, главным образом, его диаметр.
Введем обозначения:
Dкр - диаметр критического сечения;
Dэ - диаметр эквивалентного отверстия впуска в предсопловую полость;
Dп - диаметр подвижного элемента;
Dвп – диаметр впускного отверстия в рабочую полость;
Dвып - диаметр выпускного отверстия в рабочую полость.
Математическая модель газореактивного исполнительного устройства представляет собой сложную систему нелинейных дифференциальных уравнений. Получить аналитические зависимости, связывающие конструктивные параметры устройства, не представляется возможным. Сократить пространство определяемых параметров можно путем определения рациональных соотношений между конструктивными параметрами, а именно между:
диаметром критического сечения Dкр. и диаметром эквивалентного отверстия впуска в предсопловую полость Dэ;
диаметром критического сечения Dкр и диаметром подвижного элемента Dп;
диаметром впускного Dвп и диаметром выпускного Dвып отверстий в рабочую полость.
Было проведено исследование влияний указанных конструктивных параметров на динамические и статические характеристики. Минимальные размеры критического сечения, а следовательно и всего устройства, реализуются в том случае, когда давление в предсопловой полости в установившемся режиме наименьшим образом отличается от давления газа в источнике питания. Давление газа в установившемся режиме в предсопловой полости зависит от соотношения площади критического сечения и площади впускного отверстия в предсопловой полости.

Рисунок 1. График зависимости р1 от Dкр/Dэ
На рисунке 1 представлена статическая характеристика микродвигателя – зависимость давления р1 в предсопловой полости от Dкр/Dэ. Из графика видно, что в качестве рационального соотношения этих диаметров может быть рекомендовано значение, равное 1,4. Давление р1=17,75 бар при р0=18 бар, т. е. Dэ=1,4*Dкр.
Рисунок 2. График зависимости tср1 и tср2 от Dвп
На рисунке 2 представлен график зависимости времени срабатывания tср1 при включении микродвигателя и tср2 при выключении от диаметра впускного отверстия Dвп в рабочую полость при неизменном выпускном. Из графика видно, что Dвп/Dвып = 0,5. Это соотношение может быть рекомендовано рационально с точки зрения симметричности отработки управляющего сигнала.

Рисунок 3. График зависимости р2 от Dвып
На рисунке 3 приведен график зависимости давления р2 в рабочей полости от Dвып.при движении подвижного элемента с постоянной скоростью при отключении микродвигателя. При отношении Dвп/Dвып = 0,5 это давление максимально. При таких соотношениях вторым условием обеспечения симметричности отработки управляющего сигнала является отношение Dп/Dкр. Разумно представляется соотношение, равное 1,6 несимметрии менее 1мс. (рисунок 4).
Рисунок 4. График зависимости tср1 и tср2 от Dп/Dкр
Рисунок 5. График зависимости tср1 и tср2 от Dвып
Таким образом, методика проектировочного расчета выполняется в следующей последовательности:
по известному Dкр рассчитывается Dэ;
по известному Dкр рассчитывается Dп;
по нелинейной математической модели рассчитывается переходный процесс в устройстве при отработке управляющего сигнала на закрытие tср1 для различных Dвп. Определяется Dвп соответствующим требованиям ТЗ (см. рисунок 5).
по значению Dвп. определяется значение Dвып..
Dвп/Dвып = 0,5
при данных значениях параметров проводится детальное моделирование работы устройства с целью уточнения конструктивных параметров устройства.
На рисунках 6-8 изображены графики переходных процессов при включении/выключении микродвигателя при давлениях 19 и 34 бар.
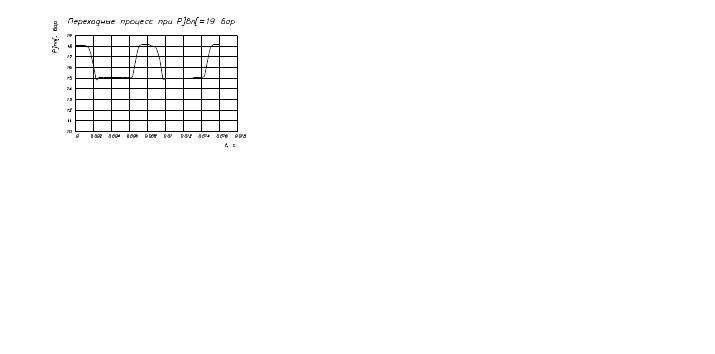
Рисунок 6. Изменение давления в предсопловой полости при включении/выключении микродвигателя

Р исунок
7. Изменение давления в рабочей
исунок
7. Изменение давления в рабочей