

Лабораторная работа №3 Изучение назначения, устройства, принципа действия и характеристик
газореактивных исполнительных устройств систем автоматического управления ЛА.
Цель работы:
Изучение назначения, устройства, принципа действия и характеристик газореактивных исполнительных устройств
Задание
1. Построить классификацию газореактивных исполнительных устройств систем автоматического управления ЛА.
2. Изучить номенклатуру, назначение, устройство, принцип действия и конструкции исполнительных устройств систем автоматического управления ЛА.
3. Изучить характеристики данных устройств – динамические, статические. На основе предлагаемой программы провести математическое моделирование работы и а также исследование влияния конструктивных параметров на динамические характеристики привода.
Построить классификацию исполнительных устройств систем автоматического управления ЛА.
Математическая модель элементов системы «газореактивный микродвигатель – устройство управления».
Газореактивное исполнительное устройство функционально состоит из двух подсистем – газореактивного микродвигателя и устройства управления.
Расчетная схема микродвигателя приведена на рис. 2.2.1.
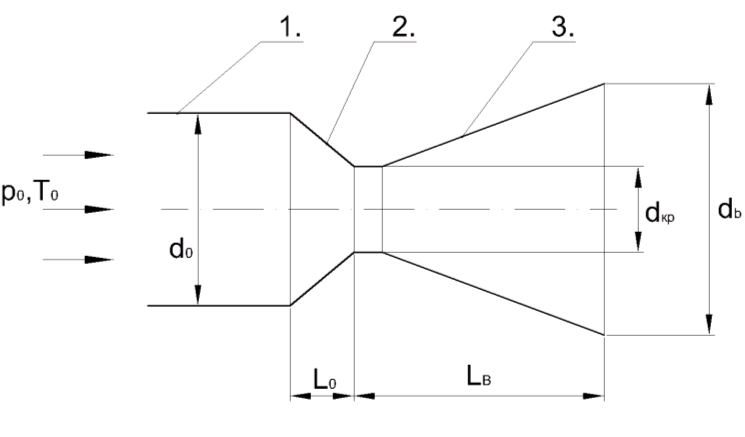
Рис. 2.2.1.
Рабочие процессы в предсопловой полости описываются следующей системой дифференциальных уравнений:


где
 0ST0*(T0
– Tc0),
0ST0*(T0
– Tc0),
T0- температура газа в предсопловой полости;
Tс0 - температура стенки конструкции предсопловой полости;
ST0 – поверхность теплообмена в предсопловой полости;
0- коэффициент теплообмена в предсопловой полости;
p0 – давление газа в предсопловой полости;
0 – плотность газа в предсопловой полости;
W0 – объем предсопловой полости;
Gро –массовый секундный приход газа из источника сжатого газа в предсопловую полость;
GоА - массовый секундный расход газа из предсопловой полости в атмосферу;
Про - удельный приход энергии газа в предсопловую полость;
ПоА -удельный расход энергии газа из предсопловой полости.
Расход газа из предсопловой полости рассчитывается по формуле

где

Sкр - площадь критического сечения сопла;
K - коэффициент адиабаты;
 -
газодинамическая функция плотности
при pв
p0=1
-
газодинамическая функция плотности
при pв
p0=1
Учитывая малую длительность работы устройства можно считать изменение температуры стенки полости пренебрежимо малым.
Предварительный анализ существующих конструктивных схем ГИУ показывает, что наиболее целесообразным представляется применение следующих трех типов устройств.
Двухкаскадного ГИУ со сферическим затвором устройства управления и управлением давлением в предсопловой полости «на входе».
ГИУ с подвижным соплом.
Двухкаскадного ГИУ с управлением давлением в предсопловой полости «на выходе». В данной схеме выключение двигателя осуществляется при перемещении затвора устройства управления на седло, расположенное в зоне критического сечения сопла.
Расчетная сема двухкаскадного ГИУ со сферическим затвором устройства управления и управлением давлением в предсопловой полости «на входе» представлена на рис. 2.2.2.
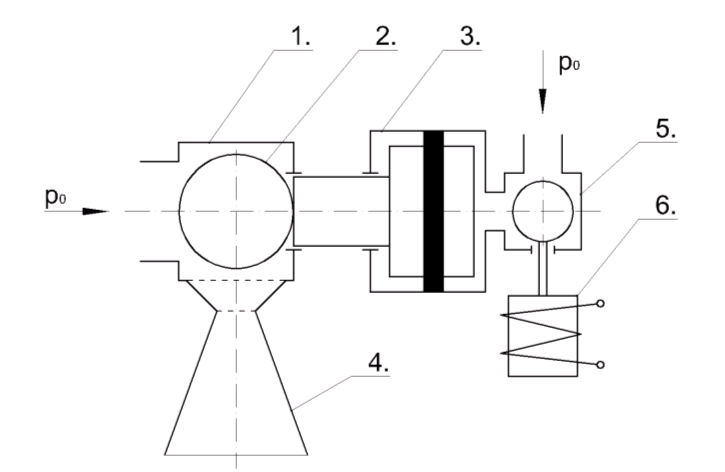
Рис. 2.2.2 Схема ГИУ со сферическим затвором.
Устройство состоит из предсопловой полости 1, с размещенным в ней сферическим затвором 2, газового привода затвора 3, газораспределителя привода 5, управляющего электромагнита 6 и сопла 4.
Рабочие процессы в предсопловой полости, рабочей полости привода и в механической подсистеме описываются следующей системой дифференциальных уравнений:





,
где
 1ST1*(T1
– Tc1),
1ST1*(T1
– Tc1),
 2ST2*(T2
– Tc2),
2ST2*(T2
– Tc2),
T1,2- температура газа в предсопловой и рабочей полости привода,
Tс1,с2 - температура стенки в предсопловой и рабочей полости привода,
ST1,Т2 – поверхности теплообмена в предсопловой и рабочей полости привода,
1, 2- коэффициенты теплообмена в предсопловой и рабочей полости привода,
p0, рА – давление газа в источнике питания и давление окружающей среды,
p1, р2 – давление газа в предсопловой и рабочей полости привода,
W1 ,W2 – объем предсопловой и рабочей полости привода ,
SП – площадь поршня привода,
S01 – площадь седла основного газораспределителя,
V – скорость поршня привода,
 -
координата подвижной части,
-
координата подвижной части,
h – коэффициент «вязкого» трения,
М – приведенная масса подвижных частей,
Gо1 –массовый секундный приход газа из ресивера в предсопловую полость,
G1А - массовый секундный расход газа из предсопловой полости в атмосферу,
Gо2 –массовый секундный приход газа в рабочую полость,
G2А - массовый секундный расход газа из рабочей полости в атмосферу,
F -сила воздействия газового потока на затвор, которая рассчитывается по зависимости

 -
удельные приходы и расходы энергии
газа.
-
удельные приходы и расходы энергии
газа.
dc – диаметр впускного седла в предсопловую полость
Расчетная схема ГИУ с подвижным соплом представлена на рис.2.2.3.

Рис. 2.2.3. Расчетная схема ГИУ с подвижным соплом
ГИУ состоит из корпуса 1 и полой подвижной втулки 2 с соплом и двух цилиндров с уплотнениями. Втулка может находиться в двух крайних положениях. В центральной части втулки выполнены щелевые отверстия. Если положение втулки таково, что эти отверстия расположены напротив отверстий, соединяющих ГИУ с источником газа, тот газ через эти отверстия поступает в предсопловую полость. В крайнем правом положении левый цилиндр перекрывает отверстия, соединяющие ГИУ с источником газа. Управление движением втулки осуществляется путем попеременного соединения рабочих полостей с источником газа и атмосферой. Рабочая полость (3) образована внешней поверхностью сопла и внутренней поверхностью корпуса ГИУ. Полость постоянно соединена с атмосферой через узкий кольцевой зазор между кромкой сопла и корпусом ГИУ и с помощью специального отверстия 4 с газораспределительным устройством. Вторая рабочая полость(5) Расположена в правой части корпуса.
Математическая модель ГРИУ с подвижным соплом описывается следующими уравнениями:


где
 3ST3*(T3
– Tc3),
3ST3*(T3
– Tc3),
2ST2*(T2 – Tc2),
T3,2- температура газа в рабочих полостях;
Tс3,с2 - температура стенки в рабочих полостях;
ST3,Т2 – поверхности теплообмена в рабочих полостях;
3, 2- коэффициенты теплообмена в рабочих полостях привода;
p3, р2 – давление газа в рабочих полостях;
р1- давление в предсопловой полости;
W3 ,W2 – объем рабочих полостей;
SП – площадь поршня привода,
S2, S3 – площади поверхности, на которые действуют давления р2, p3,
h – коэффициент вязкого трения,
- координата подвижной части,
V – скорость поршня привода,
F – тяговое усилие,
М – приведенная масса подвижных частей,
Gо3 –массовый секундный приход газа в рабочую полость 3;
G3А - массовый секундный расход газа из рабочей полости 3 в атмосферу;
Gо2 –массовый секундный приход газа в рабочую полость 5;
G2А - массовый секундный расход газа из рабочей полости 5 в атмосферу;
F -. тяговое усилие.
Расчетная схема двухкаскадного ГИУ с управлением давлением в предсопловой полости «на выходе» представлена на рис. 2.2.4.
ГИУ состоит из корпуса и размещенного в нем цилиндрического затвора. Рабочая полость, расположенная справа от затвора постоянно сообщена с источником газа и с газораспределительным устройством, которое открывает или закрывает отверстие, соединяющее рабочую полость с атмосферой. Если это отверстие закрыто, то затвор перемещается в крайнее левое положение и перекрывает критическое сечение сопла.

Рис. 2.2.4. Расчетная схема двухкаскадного ГИУ с управлением давлением в предсопловой полости «на выходе»
Математическая модель ГРИУ с посадкой регулирующего органа на седло, расположенное в зоне критического сечения описывается следующими уравнениями:


где 1ST1*(T1 – Tc1),
2ST2*(T2 – Tc2),

T1,2- температура газа в предсопловой и рабочей полостях;
Tс1,с2 - температура стенки в предсопловой и рабочей полостях;
ST1,Т2 – поверхности теплообмена в предсопловой и рабочей полостях;
1, 2- коэффициенты теплообмена в предсопловой и рабочей полостях;
p1, р2 – давление газа в предсопловой и рабочей полости привода,
р0- давление в источнике питания;
W1 ,W2 – объем предсопловой и рабочей полости;
SП – площадь поршня привода,
S1, S2– площади поверхности,на которые действуют давления p1, р2 ,
h – коэффициент вязкого трения,
Х- координата затвора;
V – скорость затвора.
М – приведенная масса подвижных частей,
Gо1 –массовый секундный приход газа из ресивера в предсопловую полость,
G1А - массовый секундный расход газа из предсопловой полости в атмосферу,
Gо2 –массовый секундный приход газа из ресивера в рабочую полость,
G2А - массовый секундный расход газа из рабочей полости в атмосферу,
dп - диаметр затвора,
dкр – диаметр критического сечения.