

4.2.3 Сау с пи – регулятором
Далее, рассматривается структурная математическая модель непрерывной системы управления термическим оборудованием с пропорционально – интегральном (ПИ) законом регулирования.
Структурная схема разработанной САУ представлена на рис. 3.12.
Рис. 3.12. Структурная математическая модель непрерывной системы управления термическим оборудованием с ПИ законом регулирования.
Передаточная функция такой замкнутой системы имеет вид:
 ,
,
где К =КО КДат.
Получим условия устойчивости при использовании ПИ – регулятора. Характеристическое уравнение в этом случае имеет вид:
А(р) =
 .
.
Область возможных значений постоянной времени интегратора определяется неравенством:
 .
.
Схема моделирования системы управления термическим оборудованием с ПИ-законом приведена на рис. 3.13.
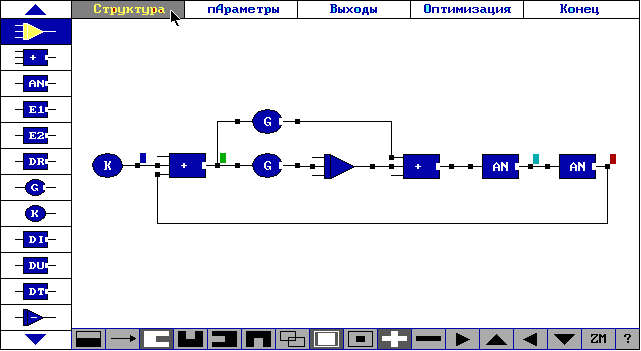
Рис. 3.13. Схема моделирования системы управления термическим оборудованием с ПИ законом.
Подготовлены исходные данные для выхода на ПК:
Результаты расчета на ПК типа IBM PC приведены на рис. 3.14(а,б,в).
По переходной характеристике исследуемой системы определены показатели качества:
Таблица 3.3.
Показатели качества ПИ-регулятора
|
КС=0,03 |
КС=0,1 |
КС=0,5 |
ﻉуст |
0 |
0 |
0 |
tp,c |
154 |
47 |
14 |
σ ,% |
3,6 |
1,5 |
6,1 |
В результате использования ПИ-регулятора, переходной процесс происходит по сривнению с П - регулятором с несколко большей величиной перерегулирования, но уменьшается время регулирования.
(а)
(б)
(в)
Рис. 3.14. Переходные процессы в системе управления термическим оборудованием с ПИ-законом: а) КС = 0,03 ; б) КС = 0,1 ; в) КС = 0,5.
Более высокие показатели качества при регулировании температуры как в статическом, так и в динамическом режимах позволяет получить ПИД–закон управления, в частности, не только высокую точность в установившемся режиме, но и лучшее быстродействие в переходных процессах.
5.Исследование влияния запаздывания на устойчивость и качество замкнутой сау
5.1. Особенность динамических характеристик звена запаздывания
При осуществлении аналитического приближения найдённой экспериментальным путем передаточной функции исследуемого объекта или системы может оказаться необходимым ввести одно или несколько звеньев с запаздыванием. Реальные звенья запаздывания чаще всего встречаются в системах из-за наличия транспортного запаздывания движущихся изделий. Но иногда понятие запаздывания оказывается полезным для построения приближенной модели сложного процесса, строгое математическое описание которого затруднительно [12,47,48]. В этих случаях переходные функции могут иметь вид, показанный на рис. 5.1.
Рис. 5.1. Переходная функция апериодического звена с запаздыванием
По сравнению с переходной характеристикой типового апериодического звена характеристика звена с запаздыванием воспроизводит сигнал с отставанием по времени на время запаздывания τз. Как следует из результатов эксперимента по исследованию термоэлектрического термостата в настоящей работе (табл. 3.1) и графика h(t) (рис. 5.2), время запаздывания для него можно оценить величиной ~38с. Такое время на два порядка меньше постоянной времени ОУ, которое составляет TO=3800с. Но даже и такое малое запаздывание в САУ с обратной связью может оказать влияние на запасы устойчивости и, как следствие, на качество переходных процессов. Такое влияние следует из особенностей динамических характеристик звена запаздывания.
Рис. 5.2
Передаточная функция звена запаздывания имеет вид:

 ,
,
следовательно,
выражение амплитудно-фазовой частотной
характеристики:
 ,
,
откуда получаем амплитудно-частотную характеристику A(ω)=1, логарифмическую амплитудно-частотную характеристику L(ω)=0 и фазо-частотную характеристику φ(ω)=-ωτЗ (рис. 5.3).
 Рис.
5.3
Рис.
5.3
Таким образом, можно сказать, что на низких частотах звено запаздывания не оказывает влияния на систему, а на высоких частотах оказывает и особенно сильно на частотах, близких к частоте ω =π/τз, где фазовая характеристика пересекает значение -180°. Поэтому фазовая характеристика разомкнутой системы с учетом звена запаздывания по сравнению с системой без учёта запаздывающего звена имеет отрицательное приращение, пропорциональное частоте ω, вследствие чего возможно нарушение устойчивости замкнутой системы управления, даже в случае исходной структурно устойчивой системы, что будет описано далее.