

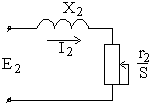
Запишем выражение для тока ротора
 - ток во вращающемся роторе
- ток во вращающемся роторе
Разделим числитель и знаменатель на скольжение S, тогда
 - ток при неподвином роторе,
- ток при неподвином роторе,
т.к. его выразили через E2 и X2 – неподвижного ротора.
Ниже дается схема замещения роторной цепи.
2) Асинхронный двигатель отдает с вала механическую мощность, а трансформатор электрическую. Решим эту задачу.
Представим
![]()
Т огда
схема замещения для роторной цепи будет
иметь вид
огда
схема замещения для роторной цепи будет
иметь вид
Полная мощность, переданная на ротор равна E2I2.
В роторной цепи она теряется только на активных элементах. Сопротивление r2 обычно мало, поэтому мощность теряемая на сопротивлении
![]()
будет эквивалентна механической мощности, которую развивает двигатель.
Итак, работу асинхронного двигателя можно свести к работе трансформатора. Отсюда векторная диаграмма и схема замещения асинхронного двигателя будут аналогичны векторной диаграмме и схеме замещения трансформатора.
III-3-6. Векторная диаграмма асинхронного двигателя
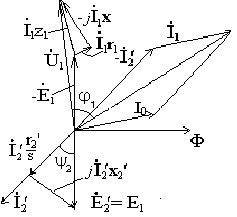
Запишем основные уравнения ЭДС и токов для асинхронного двигателя и на основании этих уравнений построим векторную диаграмму.
1.
![]()
2.
![]() ,
,
![]() ,
,
![]()
3. Выведем уравнение для токов![]() ,
,
![]()
Для двухслойной обмотки
![]()
![]() ,тогда
,тогда
,
![]() ,
,
или
![]()
или
![]() ,
,
запишем иначе
4)
![]()
На основании уравнений 1, 2, 3 построим векторную диаграмму для асинхронного двигателя. Из построения векторной диаграммы видно, что она во многом аналогична векторной диаграмме трансформатора при нагрузке.
III-3-7. Схемы замещения асинхронной машины
Для исследования работы асинхронной машины часто используются схемы замещения, которые должны отвечать основным уравнениям ЭДС и токов реальной машины.
Реально обмотки статора и ротора связаны электромагнитно. Схемы, где электромагнитная связь обмоток заменяется электрической, называются схемами замещения асинхронной машины. В теории асинхронных машин используются две схемы замещения: а) Т-образная; б) Г-образная.
Т-образная схема замещения.
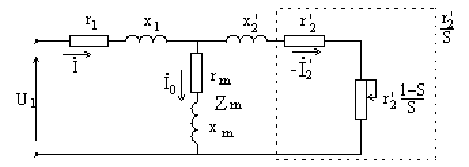
В этой схеме замещения сопротивления
![]() в разных цепях. Из опыта короткого
замыкания обычно определяют их сумму
т.е.
в разных цепях. Из опыта короткого
замыкания обычно определяют их сумму
т.е.
![]()
Поэтому в теории асинхронных машин чаще пользуются Г-образной схемой замещения. При переходе к Г-образной схеме замещения:
ток I1 должен оставаться неизменным, т.е. I1 = const.
При скольжении S = 0 ток
 ,
т.е. ток
,
т.е. ток
 должен проходить по тем же сопротивлениям
Z1 и Zm.
должен проходить по тем же сопротивлениям
Z1 и Zm.Кроме того параметры первичной обмотки и вторичной обмотки соответственно должны измениться на коэффициент С1 и
 .
.
Г-образная схема замещения
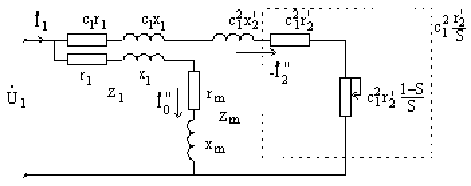
В Г-образной схеме рабочая ветвь и цепь намагничивания независимы, а сопротивления активные и индуктивные можно просуммировать.
В Г-образной схеме замещения
 ,
,
где
![]() - комплексное число
- комплексное число
Ток I1, не должен изменяться, тогда исходя из Т-образной схемы

а, в Г-образной схеме ток

после преобразования получим
![]() ,
,
поэтому параметры статорной обмотки
должны умножить на коэффициент С1,
а параметры роторной обмотки на
(см. Г-образную схему). Покажем связь
между током в роторе
![]() (Т-образной схемы замещения) с током
(Т-образной схемы замещения) с током
![]() (Г-образной схемы замещения).
(Г-образной схемы замещения).
Из Т-образной схемы ток
![]() ,
,
если подставить выражение тока
![]() и преобразуем это выражение, тогда
получим
и преобразуем это выражение, тогда
получим
![]() ,
,
тогда отношение токов
![]() равно комплексному коэффициенту С1
равно комплексному коэффициенту С1
![]()
т.е. С1 представляет собою отношение
напряжения приложенного к двигателю
![]() к напряжению на намагничивающем контуре
при токе идеального холостого хода (S =
0).
к напряжению на намагничивающем контуре
при токе идеального холостого хода (S =
0).
![]()
Реально в машинах r1 и x1 << rm и Xm. Если пренебречь сопротивлением r1 и rm, тогда коэффициент С1 примет вещественную величину
![]() ,
,
![]()
Г-образная схема замещения широко используется для построения круговой диаграммы асинхронной машины, а также вывода формулы электромагнитного момента.
III-4. Вращающий электромагнитный момент асинхронной машины
I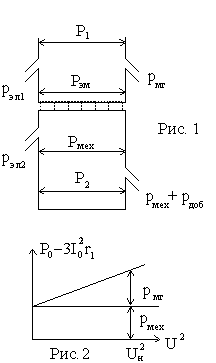 II-4-1.
Энергетическая диаграмма вращающий
момент асинхронного двигателя
II-4-1.
Энергетическая диаграмма вращающий
момент асинхронного двигателя
Для вывода формулы этого момента предварительно рассмотрим энергетическую диаграмму асинхронного двигателя (рис.1).
1. Активная потребляемая мощность из сети
![]()
2. В статоре имеются потери в обмотках
![]()
и магнитные потери Рмг, которые определяются из опыта холостого хода (см. рис.2).
3. Рэм – электромагнитная мощность
![]() ,
,
она электромагнитным путем передается на ротор. В роторе потерями в стали пренебрегаем, т.к. f = (2 - 3)Гц.
4. Потери в обмотке ротора Рэл2 определим ниже. pмех – механические потери определяем из рис.2. Рдоб – добавочные потери принимаются равными 0,5% от Р1. Рмех - полная механическая мощность.
![]()
Мощность на валу
![]()
КПД
-
![]()
М - электромагнитный момент, создаваемый в результате взаимодействия вращающего магнитного поля с током в роторе (предварительное определение). Электромагнитный момент двигателя должен уравновесить момент на валу – М2 и момент холостого хода М = М2 + М0 .
Выразим электромагнитную и полную механическую мощность через электромагнитный момент.
Pэм = M1,
где 1 - угловая скорость поля статора.
Pмех = M,
где - угловая скорость ротора.
Потери в обмотке ротора
![]()
итак
![]() .
.
Потери в меди (алюминии) обмотки ротора зависят от электромагнитной мощности и скольжения и прямо от параметров не зависят. Для уменьшения этих потерь номинальное скольжение должно быть как можно меньше.
Исходя из этого выражения, получим формулу электромагнитного момента
![]() ,
откуда
,
откуда
![]() (1).
(1).
Используя Г-образную схему замещения получим

 (2)
(2)
Подставив уравнение (2) в уравнение (1) получим

если
![]() ,
тогда
,
тогда
 .
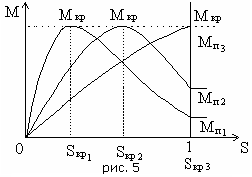
Зависимость M = f(S)
.
Зависимость M = f(S)
З ависимость
электромагнитного момента от скольжения
называется механической характеристикой.
Из выражения видно, что электромагнитный
момент асинхронного двигателя зависит
от U2 квадрата подведенного
напряжения, т.е. если U уменьшить на 10%,
то момент уменьшится на 19%. При постоянных
параметрах схемы замещения зависимость
М электромагнитного момента от скольжения
представлена на рис.3.
ависимость
электромагнитного момента от скольжения
называется механической характеристикой.
Из выражения видно, что электромагнитный
момент асинхронного двигателя зависит
от U2 квадрата подведенного
напряжения, т.е. если U уменьшить на 10%,
то момент уменьшится на 19%. При постоянных
параметрах схемы замещения зависимость
М электромагнитного момента от скольжения
представлена на рис.3.
Пояснение зависимости M = f(S).
Область от S = 0 Sкр
При малом скольжении X2S
0, тогда ток в роторе
![]() активному току, с увеличением S
активному току, с увеличением S
![]()
![]() M
M
Момент зависит от потока и активной составляющей тока в роторе
![]()
В области Mmax начинает проявляться индуктивное сопротивление X2S.
Область скольжений S = Sкр 1
В этой области с увеличением скольжения
S увеличивается индуктивное сопротивление
ротора X2S = X2S
за счет которого увеличивается угол 2
между ЭДС
![]() и током (см. рис. 4), активная составляющая
при этом уменьшается, а следовательно
уменьшается и момент, т.е. S
X2S
и током (см. рис. 4), активная составляющая
при этом уменьшается, а следовательно
уменьшается и момент, т.е. S
X2S
![]()
![]() M
M
На рис.3 ток, при S = 1 равен пусковому, который в 57 раз больше номинального. При S = 0 ток I1 0, т.к. при S = 0 двигателем потребляется реактивная мощность для создания вращающего поля, кроме того, двигателем потребляется активная мощность на покрытие потерь в статоре.
При S = 0 ток ротора
![]() ,
т.к.
,
т.к.
![]()
Кривая зависимости M = f(S) характеризуется тремя моментами:
а) Пусковой момент Мп при S = 1
б) Максимальный момент Мmax Sкр
в) Номинальный момент МН SН
Отношение максимального (критического) момента к номинальному, называется перегрузочной способностью
![]()
III-4-2. Максимальный (критический) момент асинхронной машины
Для определения максимального момента необходимо взять первую производную от М по S и приравнять к нулю
![]() .
.
Определим из полученного выражения критическое скольжение - Sкр соответствующего максимальному моменту
 ,
(1)
,
(1)
обычно
![]() ,
то
,
то
![]() ,
,
критическое скольжение определяется соотношением активного сопротивления ротора к суммарному индуктивному сопротивлению обмотки ротора и статора.
Если подставим выражение (1) в общее уравнение момента и сделаем необходимые преобразования, то получим выражение максимального момента.

Знак + - соответствует двигательному режиму. Знак - - соответствует генераторному режиму
При генераторном режиме
![]()
Из выражения Мкр видно, что величина максимального момента не зависит от активного сопротивления роторной цепи, но сильно оно влияет на его расположение. Если сопротивление роторной цепи увеличивать, то увеличивается Sкр и кривая момента смещается вправо
![]() ,
,
![]()
Как видно из кривых (рис. 5), чем больше активное сопротивление в роторной цепи, тем больше пусковой момент и меньше пусковой ток. Это ценное свойство используется в двигателях с фазным ротором.
III-4-3. Расчетная формула момента асинхронного двигателя
Расчетная формула момента показывает, что момент асинхронного двигателя пропорционален потоку и активной составляющей тока ротора.
Запишем известное выражение момента
![]()
для вывода расчетной формулы используем нижнюю часть векторной диаграммы асинхронного двигателя, рис. 6
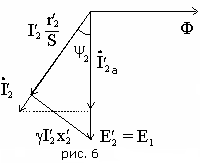
![]() ,
,
![]() ,
,
![]() ,
,
![]()
тогда

тогда
![]() ,
т.е. момент зависит от потока и активной
составляющей тока ротора.
,
т.е. момент зависит от потока и активной
составляющей тока ротора.
III-5. Регулирование частоты вращения асинхронных двигателей
Для асинхронного двигателя частота вращения ротора определяется по формуле
![]() ,
или
,
или
![]() ,
,
откуда видно, что скорость вращения ротора можно регулировать:
1. f = var - изменять частоту подводимого напряжения.
2. p = var - изменять число пар полюсов.
3. S r2 - изменять скольжение:
а) сопротивлением r2 в цепи ротора.
б) введением E в роторную цепь.
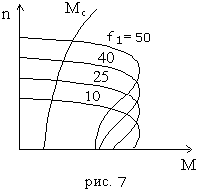
III-5-1. Регулирование частоты вращения двигателя изменением частоты
Для регулирования частоты вращения асинхронного двигателя необходим преобразователь частоты. При регулировании необходимо стремится к тому, чтобы с изменением частоты не ухудшались рабочие характеристики. Для чего необходимо, чтобы с изменением частоты f поток оставался постоянным
(![]() )
)
![]() ,
,
 т.е.
при регулировании частоты одновременно
необходимо регулировать и напряжение.
Регулирование скорости с условием
т.е.
при регулировании частоты одновременно
необходимо регулировать и напряжение.
Регулирование скорости с условием
![]()
является экономичным. Для поддержания m, Cos, , как показали исследования можно достичь этого, если выполняется условие
![]() .
.
Регулирование изменением частоты происходит плавно. На рис.7 представлены механические характеристики при различных значениях частоты.
III-5-2. Регулирование частоты вращения двигателя путем изменения числа пар полюсов
Это способ регулирования является ступенчатым. Переключение производится обмоткой статора с одной синхронной скорости на другую. Обычно ротор при этом короткозамкнутый.
Наибольшее распространение получили обмотки с переключением числа полюсов 1:2. Кроме того, имеются обмотки разработанные Харитоновым для станков, которые переключают число полюсов как 1:2, так и отличных от этого соотношения. Кроме того, в промышленности используются обмотки на принципе - Полюсной амплитудной модуляции, разработанной англичанином Райклифом. Мы рассмотрим обмотки только при переключении числа полюсов 1:2.
Обычно регулирование производится на две, три, четыре ступени. На статоре укладывается либо одна обмотка с переключением, либо две с переключением на четыре скорости. Это дает возможность увеличить пределы регулирования, но понижает использование машины, поскольку работает одна обмотка.
Требования к обмотке.
1. Схема обмотки должна иметь минимальное число переключаемых элементов.
2. На всех ступенях насыщение магнитной системы машины не должно превышать допустимых значений.
3. Обмоточные коэффициенты на всех ступенях вращения должны быть достаточно высокими.
4. При включении обмотки не должны возникать значительные отрицательные асинхронные и синхронные вращающие моменты и вибрационные силы, обусловленные высшими гармониками магнитного поля.
5. Для каждой ступени устанавливается определенная мощность по нагреву.
6. Направление вращения ротора должно быть неизменным.
В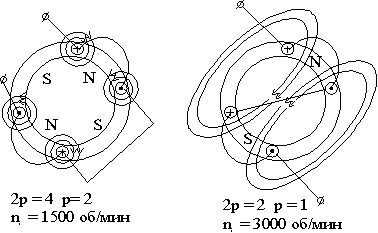 ыполнить
эти условия сложно и не всегда разрешимо.
ыполнить
эти условия сложно и не всегда разрешимо.
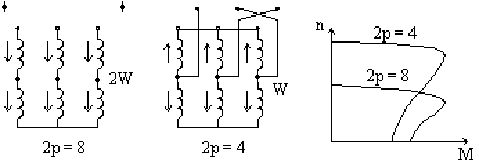
Принцип переключения числа полюсов основан на том, что изменяя ток в одной из полуфаз обмотки изменяется число полюсов. Этот принцип продемон-стрирован на рис. 8.
Электромагнитная мощность для любого числа Р обмотки статора определяется соотношением
![]() ,
,
![]() ,
,
Рис. 8
пользуясь этим соотношением, проанализируем работу нескольких схем.
Y/Y - 8/4

![]() Рис. 9
Рис. 9
Работа при Р = const
![]()
Y/YY - 8/4
![]() Рис. 10
Рис. 10
![]()
/YY - 8/4
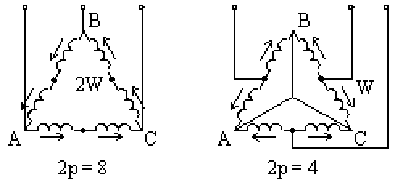
![]() Рис. 11
Рис. 11
Работа при постоянной мощности
Р = const
III-5-3. Регулирование частоты вращения двигателя сопротивлением в цепи ротора (с фазным ротором)

Как известно, если увеличивать r2 в цепи ротора, то скольжение, при постоянном моменте сопротивления, возрастает, а скорость уменьшается (рис.12).
Потери в роторной цепи Pэл2 = PэмS, т.е. при глубоком регулировании потери Pэл2 возрастают, а это для двигателей большой мощности не допустимо. Поэтому в двигателях большой
мощности регулирование частоты вращения производят за счет введения Е в роторную цепь. При любом скольжении ЭДС Е должна иметь ту же частоту, что и основная ЭДС Е2S роторной обмотки. Идея регулирования сводится к тому, что если Еk направлена встречно с Е2S, то скорость уменьшается, а если согласно с Е2S, то скорость увеличивается. Схема введения ЭДС Е в роторную цепь представлена на рис.13.

Рис. 13
III-5-4. Регулирование частоты вращения двигателя изменением подводимого напряжения
 Этот
способ регулирования не дает больших
результатов. Диапазон регулирования
получается небольшим (см. рис.14).
Этот
способ регулирования не дает больших
результатов. Диапазон регулирования
получается небольшим (см. рис.14).
В практике используются различные импульсные способы регулирования частоты вращения на базе тиристоров.