

О сновное уравнение движения электропривода
![]() .
.
Установившийся процесс, когда
![]() ,
,
![]() ,
,
![]() ,
,
Если
![]() ,
,
![]() ,
,
![]() .
.
Если
![]() ,
,
![]() ,
,
![]() .
.
у словием
устойчивой работы агрегата является:
словием
устойчивой работы агрегата является:
![]() ,
точка
будет соответствовать устойчивой работе
агрегата, рис.69.
,
точка
будет соответствовать устойчивой работе
агрегата, рис.69.
4. Рабочие характеристики, это зависимость
![]() ,рис.69
,рис.69
Р
рис. 69![]() ,
тока
,
кпд, скорости и момента от мощности на
валу.
,
тока
,
кпд, скорости и момента от мощности на
валу.
IV-6-3-2Двигатели последовательного возбуждения
Обмотка возбуждения двигателя включена последовательно с якорем, рис. 70. Ток якоря равен току возбуждения. Поэтому обмотка возбуждения имеет большое сечение и малое число витков. Последовательное соединение обмотки возбуждения является отличительной особенностью этого двигателя и влияет на вид характеристик. С увеличением тока якоря, увеличивается поток, скорость двигателя резко падает, т. е. получается мягкая скоростная характеристика, рис. 71.
1 .Скоростная
характеристика
,
.Скоростная
характеристика
,
![]() .
В общем виде, за счет насыщения, не имеет
решение, аналитическое выражение
скоростной характеристики можно получить
только для ненасыщенной машины, когда
.
В общем виде, за счет насыщения, не имеет
решение, аналитическое выражение
скоростной характеристики можно получить
только для ненасыщенной машины, когда
![]() ,
рис. 72.
,
рис. 72.
М омент
,
при
,
омент
,
при
,
![]() ,
т. е. если ток нагрузки возрастает в 2
раза, то момент в 4 раза. Это условие и
определяет область применения этих
двигателей, т. е. используются там, где
при пуске нужен большой пусковой момент
(тяговый привод). Скоростная характеристика
при
,
запишется:
,
т. е. если ток нагрузки возрастает в 2
раза, то момент в 4 раза. Это условие и
определяет область применения этих
двигателей, т. е. используются там, где
при пуске нужен большой пусковой момент
(тяговый привод). Скоростная характеристика
при
,
запишется:
![]() .
.
2 .
Моментная характеристика,
,
,
при
,
,
рис. 71.
.
Моментная характеристика,
,
,
при
,
,
рис. 71.
3. Механическая характеристика, . Аналитическое выражение характеристики может быть записано при условии .
![]() ,
,
,
,
![]() ,
если подставить ток
в исходное уравнение, получим:
,
если подставить ток
в исходное уравнение, получим:
![]() ,
,
![]() ,
где
,
где
![]() .
.
Общий вид механических характеристик представлен на рис. 73.
Двигатель последовательного возбуждения
пойдет на разнос при работе его в
холостую. Это может привести к механическим
поломкам двигателя. Поэтому, минимальный
ток двигателя должен быть не менее
![]() .
.
IV-6-3-3 Двигатель смешанного возбуждения
Принципиальная схема включения двигателя представлена на рис. 74. В зависимости от того, какая из обмоток преобладает по потоку, двигатели подразделяются на две разновидности:
1
Рис.74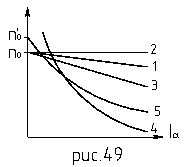
![]() ,
при согласном включении,
,
при согласном включении,
![]() получаем характеристику (3).
получаем характеристику (3).
2
Рис.75
![]() ,
,
![]() .
.
При согласном включении обмоток, при том же токе якоря, можно получить повышенный момент. Такой двигатель используется для тяговых установок и там, где имеются резкие изменения нагрузки.
IV-6-4. Регулирование частоты вращения двигателей постоянного тока
С точки зрения, регулирования частоты
вращения двигателя постоянного тока
являются универсальными. Можно
регулировать скорость за счет изменения
сопротивления в цепи якоря, потоком и
подводимым напряжением. Это видно из
формулы:
![]() .
.
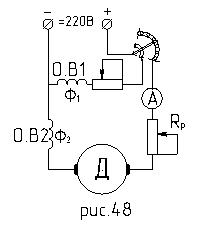
IV-6-4-1. Регулирование частоты вращения сопротивлением в цепи якоря.
Уравнения токов до и после введения сопротивления
![]()

Рис.76![]()

 ,
,
![]() ,
откуда
,
откуда
Рис.77![]()
![]() и момент уменьшается (
и момент уменьшается (![]() )
.
)
.
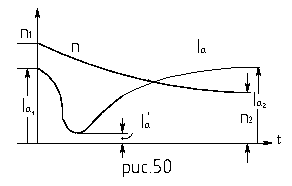
При этом
![]() и
скорость
уменьшается. С уменьшением скорости
ток якоря возрастает, и он достигнет
исходного тока якоря, но при меньшей
скорости
.
и
скорость
уменьшается. С уменьшением скорости
ток якоря возрастает, и он достигнет
исходного тока якоря, но при меньшей
скорости
.
Переходный процесс показан на рис. 76.
Регулирование частоты вращения сопротивлением в цепи якоря осуществляется в сторону уменьшения скорости, рис. 77.
Но так как ток якоря протекает по Rр,
то увеличиваются общие потери, и снижается
кпд. При постоянном токе, за счет
увеличения падения напряжения
![]() ,
скорость двигателя уменьшается.
,
скорость двигателя уменьшается.
IV-6-4-2.Регулирование частоты вращения за счет изменения потока
Т
Рис.78
![]()
 ок
якоря до и после изменения потока
ок
якоря до и после изменения потока
![]() ,
,
![]() ,
их отношение
,
их отношение
![]() .
Уравнение моментов
.
Уменьшим поток на
.
Уравнение моментов
.
Уменьшим поток на
![]() ,
т. е.
,
т. е.
![]() ,
,
![]() .
Напряжение примем за единицу, тогда
.
Напряжение примем за единицу, тогда
![]() .
.
Ток якоря возрос в 3,3 раза, тогда
![]() ,
то
,
то
![]() и
и
![]() (возрастает).
Переходный процесс представлен на рис.
78.
(возрастает).
Переходный процесс представлен на рис.
78.
Т ок
ок
![]() .
С увеличением скорости вращения, ток
якоря будет уменьшаться, но он будет
больше исходного т. к. уменьшен поток.
.
С увеличением скорости вращения, ток
якоря будет уменьшаться, но он будет
больше исходного т. к. уменьшен поток.
При уменьшении потока частота вращения возрастает, рис 79.
Как правило, регулирование частоты вращения изменением потока производят в сторону увеличения. В сторону уменьшения регулирование мало эффективно из-за насыщения магнитной цепи.
IV-6-4-3. Регулирование частоты вращения изменением подводимого напряжения.
Регулирование частоты вращения изменением подводимого напряжения производится следующими способами:
А) Система генератор-двигатель (Г-Д).
Б) Тиристорный преобразователь-двигатель (ТП-Д).
В) Широтно-импульсное регулирование.
А) Система Г-Д, рис.80.
![]()
Увеличивая ток возбуждения генератора iвг, возрастает поток Фг и Ег, а следовательно увеличивается напряжение на якоре двигателя и скорость возрастает. Регулирование происходит плавно при малых потерях энергии.
Эта система используется при большой мощности двигателя (подъёмники, прокатные станы, экскаваторы и т.д).
Б) Тиристорный преобразователь-двигатель.
В системе Г-Д используется большое число
машин, что увеличивает стоимость
установки и снижает надежность.Поэтому
в последнее время для регулируемого
напряжения все чаще используются
статические преобразователи, рис.81.
Увеличивая угол управления
![]() - площадь полупериода уменьшается,
уменьшается среднее значение напряжения
- Uср, а следовательно
уменьшается скорость вращения.
- площадь полупериода уменьшается,
уменьшается среднее значение напряжения
- Uср, а следовательно
уменьшается скорость вращения.
В) Широтно-импульсное регулирование.
Идея регулирования напряжения подводимого к двигателю заключается в том, что, изменяя длительность подключения двигателя ключом (К) к сети, изменяется среднее значение напряжения, рис. 82. В качестве ключа используются схемы на базе тиристоров или транзисторов.
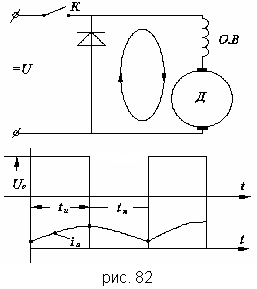
Изменяя
время импульса tи
изменяется скважность
![]() ,
,
где tи - время импульса;
tп - время паузы.
Среднее значение Uср=U0.
![]() .
.
Как видим, изменяя среднее значение напряжения, можно регулировать частоту вращения двигателя. Эта система широко используется вместо контактакторно-резисторных систем.