

Министерство образования и науки Российской Федерации
ИРКУТСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра конструирования и стандартизации в машиностроении
наименование кафедры
Допускаю к защите
Руководитель А.В. Шматкова
И.О.Ф.
Механизм самоходного шасси с двухтактным
двигателем внутреннего сгорания
Наименование темы
Пояснительная записка
к курсовой работе по дисциплине
«Теория машин и механизмов»
1.002.00.00.ПЗ
обозначение документа
Выполнил студент группы ЭЛб-11-1 _______ Б.В. Горбонос
подпись И.О. Фамилия
Нормоконтролер _______ А.В. Шматкова
подпись И.О.Фамилия
Курсовой проект защищен
с оценкой ____________
Иркутск 2013 г.
Содержание
Ведение 2
1. Структурный анализ механизма 3
2. Первая задача кинематического анализа 4
2.1 Определение недостающих размеров 4
2.2 Определение масштабного коэффициента 4
3. Вторая задача кинематического анализа 5
3.1 Определение скоростей всех точек механизма 5
3.2 Определение угловых скоростей звеньев механизма 6
4. Третья задача кинематического анализа 7
4.1 Определение ускорений всех точек и звеньев механизма 7
4.2 Определение угловых ускорений шатуна 8
5. Кинематические диаграммы 9
6. Кинетостатический анализ механизма 10
6.2 Расчет ведущего звена 12
7. Синтез кулачкового механизма 14
8. Расчет параметров зубчатых колес 21
9. Синтез планетарного редуктора 23
9.1 Подбор чисел зубьев методом сомножителей 23
9.2 Графический метод исследования планетарных передач 28
Заключение 30
Список используемых источников 31
Ведение
1. Структурный анализ механизма
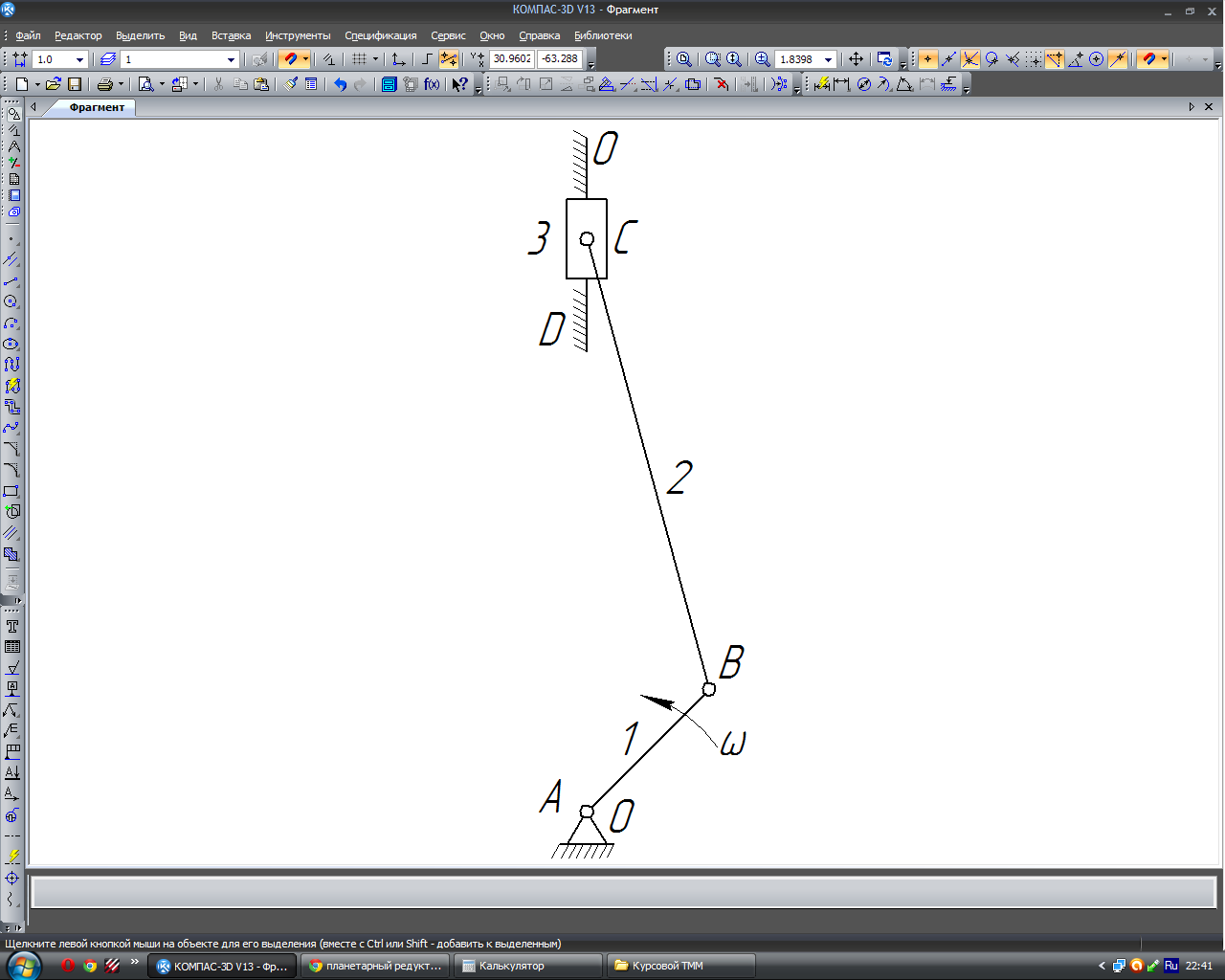
Рис. 1 – Кривошипно-шатунный механизм
Проведем структурный анализ кривошипно-шатунного механизма изображенного на рисунке 1:
Звенья:
0. Неподвижная направляющая, опора;
1. Кривошип;
2. Шатун;
3. Ползун.
А (0,1) – низшая, вращательная кинематическая пара 5 класса, В (1,2) – низшая, вращательная кинематическая пара 5 класса, С (2,3) – низшая, вращательная кинематическая пара 5 класса, D (3,0) – низшая, поступательная кинематическая пара 5 класса.
Определяем степень подвижности:

Лишних степеней свободы, высших кинематических пар, пассивных связей в механизме нет.
 2.
Первая задача кинематического анализа
2.
Первая задача кинематического анализа
2.1 Определение недостающих размеров
Определяем длину кривошипа:
Определяем длину шатуна:
Определим положение центра масс шатуна:

2.2 Определение масштабного коэффициента
Определяем масштабный коэффициент:
где
 – длина
кривошипа на чертеже.
– длина
кривошипа на чертеже.
Определяем размеры шатуна на чертеже:
Определим положение центра масс шатуна на чертеже:
 3.
Вторая задача кинематического анализа
3.
Вторая задача кинематического анализа
3.1 Определение скоростей всех точек механизма
Определяем угловую скорость ведущего звена:

Определяем скорость точки B:

Определяем масштабный коэффициент плана скоростей:
где
 - длина вектора скорости точки B
на чертеже.
- длина вектора скорости точки B
на чертеже.
Измеряем на чертеже длины векторов скоростей точки С и S2 результаты измерения заносим в таблицу 1.
Длины векторов скоростей точек механизма. Таблица 1
мм № |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
0 |
41,72 |
50 |
28,99 |
0 |
28,99 |
50 |
41,72 |
|
32,5 |
44,05 |
0 |
40,32 |
32,5 |
40,32 |
0 |
44,05 |
|
50 |
35,92 |
0 |
35,92 |
50 |
35,92 |
0 |
35,92 |



Определяем скорости точек:
 ,
,
где [l] – длины векторов скоростей точек механизма (см. таблицу 1).
Числовые значения скоростей приведены в таблице 2.
Скорости точек механизма. Таблица 2
м/с № |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
0 |
1,7 |
2,04 |
1,18 |
0 |
1,18 |
2,04 |
1,7 |
|
1,326 |
1,797 |
0 |
1,645 |
1,326 |
1,645 |
0 |
1,797 |
|
2,04 |
1,465 |
0 |
1,465 |
2,04 |
1,465 |
0 |
1,465 |


