

Контрольні питання.
1.Що називається механічною характеристикою?
2.Яка різниця міх природними і штучними механічними характеристиками?
3.Де застосовують асинхронні двигуни з фазним ротором?
4.Методи пуску асинхронних електродвигунів.
5.Які існують способи регулювання частоти обертання двигунів постійного струму?
6.Які ви знаєте види гальмування асинхронних електродвигунів.
Література.
1. Гончар В.Ф., Тищенко Л.П. електрообладнання і автоматизація сільськогосподарських агрегатів і установок. – К.: Вища шк., 1989.
2.Электрооборудование животноводческих предприятий и автоматизация производственных процессов в животноводстве. Под ред. Кудрявцева И.Ф. – М.: Колос, 1988.
3.Чиликин М.Г. Сандлер А.С. Общий курс електропривода – М.:Енергоиздат, 1987.
Методичні вказівки.
Асинхронні двигуни найбільш поширені в народному господарстві завдяки простоті будови, високій надійності і порівняно невеликій вартості порівняно з іншими типами двигунів.
Трифазні двигуни виготовляють двох модифікацій: з коротко замкнутою обмоткою ротора і з фазною обмоткою ротора, кінці якої виведені на контактні кільця, які розміщені на валу ротора і ізольовані від вала і один від одного.
Наявність кілець позволяє вводити додатковий опір в обмотку ротора.
Механічною характеристикою асинхронного двигуна називають залежність його кутової швидкості або ковзання від електромагнітного моменту, який він розвиває, тобто ω=f(М), або s=f(M).
Механічну характеристику , що відповідає номінальним значенням напруги і частоти струму та відсутності зовнішніх додаткових опорів резисторів у колах статора і ротора, називають природною,а всі механічні характеристики, що не відповідають цим умовам, - штучними.
Особливістю асинхронного двигуна являє відставання обертання ротора від частоти обертового магнітного поля, яке створюється змінним струмом, протікаючим по трифазній обмотці статора. Це відставання, виражене у відносних одиницях, називається ковзанням s:
s=![]()
де ωо і ω – кутова швидкість магнітного поля статора і вала ротора, рад· с-1,
![]()
nо і n – частота обертання магнітного поля статора і вала ротора, об/хв.
Кутова швидкість магнітного поля статора (синхронна)
ωо=![]() ,
no=
,
no=![]()
ƒ- частота мережі, Гц.
р- число пар полюсів статора двигуна.
Згідно з законом Ома, зведений фазний струм обмотки ротора у схемі заміщення асинхронного двигуна можна визначити за формулою
![]()
І2'=
З цього рівняння видно, що при збільшенні ковзання від s=0 до s=1 струм ротора зростає від І2'=0 до струму короткого замикання І2= І2к', який є пусковим струмом двигуна.
Електромагнітний момент визначається за формулою
М=![]() ,
Нм
,
Нм
де
Ре
електромагнітна потужність, яка
передається магнітним потоком від
статора до ротора, Вт. ![]() ,
Вт
,
Вт
Підставивши значення електромагнітної потужності одержимо:
![]()
 ,
Нм
,
Нм
де r1 – опір фази статора,
r2´ - приведений активний опір фази ротора,
r2´
=k2r2=(![]()
Ес, Ер- ЕРС статора і ротора
Ес=0,95Uн,
Ер =76 В,
r2 – повний активний опір фази ротора,
х1- індуктивний опір фази статора,
х2- індуктивний опір фази ротора,
х2´- приведений індуктивний опір фази ротора
х1+ х2´=хк2=3,7 Ом
См=0,66 – коефіцієнт моменту.
В момент пуску електродвигуна ковзання s=sп=1, і двигун розвиває початковий пусковий момент
![]()
 ,
Нм
,
Нм
В процесі розгону момент електродвигуна зростає до максимального значення, яке називають критичним і позначають Мкр. Ковзання , при якому найбільший момент, називається критичним ковзанням і позначається sкр.
sкр= 
З рівняння видно, що ковзання прямо пропорційне активному опору ротора.
Підставивши значення sкр в формулу електромагнітного моменту замість ковзання s , одержимо
![]()
 ,
Нм
,
Нм
Знак “+” в приведених рівняннях відноситься до двигунного режиму, знак “-“ – до генераторного режиму.
Після нескладних перетворень матимемо
М= ,Нм
,Нм
де
q=
Максимальний момент визначається з формули:
![]() ,
де
,
де
![]() -
кратність
максимального моменту, наводиться в
каталогах)
-
кратність
максимального моменту, наводиться в
каталогах)
Швидкість асинхронних двигунів можна регулювати зміною вхідної напруги, зміною опору, зміною частоти, зміною кількості пар полюсів, зміною ковзання.
Для асинхронних двигунів можливі такі самі способи електричного гальмування, як і для двигунів постійного струму паралельного збудження: рекуперативне, динамічне, противмиканням.
Рекуперативне гальмування виникає тоді, коли ввімкнений в електричну мережу асинхронний двигун під дією активного моменту статичних опорів робочої машини обертається у напрямі обертання магнітного поля статора з швидкістю, вищою за синхронну (ω>ω 0). При цьому двигун працює як асинхронний генератор, віддаючи активну енергію в мережу.
Динамічне гальмування здійснюється так. Обмотку статора двигуна вимикають з електричної мережі, з’єднують її за однією із схем, і приєднують до джерела постійного або змінного струму.
У двигуні з фазним ротором, крім того, обмотку ротора замикають на гальмівні резистори. При цьому двигун, обертається за інерцією, працює як синхронний генератор. Електрична енергія, яку він виробляє, витрачається на нагрівання обмотки ротора і гальмівних резисторів. При зниженні кутової швидкості гальмівний момент знижується і ефективність гальмування зменшується.
Гальмування противмиканням має місце тоді, коли ротор і магнітне поле двигуна обертається у протилежних напрямах. Протилежність напрямів обертання досягається двома способами: зміною напряму обертання ротора при незмінному напрямі обертання магнітного поля або, навпаки, зміною напряму обертання магнітного поля при незмінному напрямі обертання ротора двигуна.
Напрям обертання ротора при незмінному напрямі обертання магнітного поля змінюється тоді, коли момент статичних опорів робочої машини активний і за своєю величиною більший від моменту, який розвивається двигуном. При цьому робоча машина обертає ротор двигуна проти напряму обертання магнітного поля статора. Двигун працює з ковзанням більше одиниці і розвиває гальмівний момент. Для обмеження струму в обмотках з фазним ротором вмикають резистори з великим електричним опором. Здебільшого при гальмуванні противмиканням використовують пускові резистори і резистори ступеня противмикання.
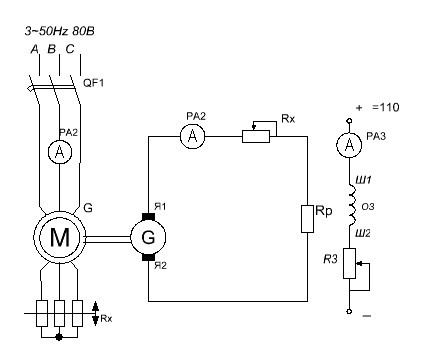
Рис.1. Схеми вмикання 3-фазного асинхронного двигуна з фазним ротором при дослідженні механічних характеристик:
а) в режимі двигуна;

Рис.2. Схеми вмикання 3-фазного асинхронного двигуна з фазним ротором при дослідженні механічних характеристик:
б) в режимі противмикання при живленні змінним струмом.