

Контрольні питання.
Що називається механічною характеристикою?
Де застосовується двигун постійного струму?
Як регулюють частоту обертання двигунів постійного струму?
Чому при шунтуванні обмотки збудження збільшується швидкість обертання?
Чи можливий генераторний режим?
Література.
1. Гончар В.Ф., Тищенко Л.П. Електрообладнання і автоматизація сільськогосподарських агрегатів і установок. – К.: Вища шк., 1989.
2. Электрооборудование животноводческих предприятий и автоматизация производственных процессов в животноводстве. Под ред. Кудрявцева И.Ф. – М.: Колос, 1988.
Методичні вказівки.
Схема ввімкнення двигуна постійного струму послідовного збудження показана на рис.1. В двигунах послідовного збудження всі елементи схеми – обмотка якоря, обмотка збудження, пусковий реостат вмикаються послідовно. Так як у двигунів послідовного збудження обмотка збудження ввімкнена послідовно з обмоткою якоря, тому по ній проходить повний струм якірного кола, який є одночасно струмом збудження. При збільшенні навантаження цей струм зростає, а разом з ним зростає і магнітний потік двигуна. Залежність магнітного потоку від струму не лінійна. Точного аналітичного виразу вона не має, тому не можна одержати і точного аналітичного виразу механічних характеристик. Опір пускового реостата вибирають в залежності від необхідного початкового моменту.
Rп=![]()
де Rc – опір серієсної обмотки.
Рівняння швидкісної характеристики має вигляд:
n=![]()
Rдв – внутрішній опір якірного кола. Внутрішній опір якірного кола двигуна, у свою чергу, складається з опорів обмотки якоря, обмотки збудження, обмотки додаткових полюсів та щіткового контакту.
Якщо не враховувати насичення магнітної системи двигуна, тобто вважати, що при збільшенні струму збудження магнітний потік зростає прямолінійно, то можна записати:
Ф=І
де - коефіцієнт пропорційності. В цьому випадку формула для визначення електромагнітного моменту матиме такий вигляд:
М=КмФІ=КІ2.
Механічною характеристикою електродвигуна називають залежність його кутової швидкості від електромагнітного моменту, який він розвиває, тобто ω=f(M).
Зміна швидкості при заданій зміні моменту для різних електродвигунів неоднакова і залежить від жорсткості їх механічних характеристик.
Механічні характеристики визначають взаємодію електричної і механічної частин привода і є основними показниками статичних і динамічних його властивостей.
Електромеханічна характеристика – це залежність кутової швидкості електродвигуна від струму в його якорі , тобто ω=f(І).
Електромеханічні характеристики використовують для визначення електричного навантаження двигуна в робочих режимах, для розрахунків опорів пускових і гальмівних резисторів.
Розрізняють статичні і динамічні механічні і електромеханічні характеристики. Статичні характеристики відповідають усталеним, а динамічні – неусталеним режимам роботи електропривода.
Механічні і електромеханічні характеристики поділяють на природні та штучні.
Механічну характеристику, що відповідає номінальній напрузі, підведеній до якірного кола двигуна, і відсутності зовнішнього додаткового опору резисторів у колі якоря, називають природною, а всі інші характеристики, що не відповідають цим умовам, - штучними.
Природну механічну характеристику будують в такій послідовності. Спочатку задаються рядом значень струму І1, І2,....Іn і за характеристиками ω=f(І) і М= f(І) знаходять відповідні значення швидкості ω1, ω2,... ωn і моменту М1, М2, ...Мn, а потім у прямокутній системі координат за точками з координатами (М1,ω1), (М2,ω2), ... (Мn,ωn) будують механічну характеристику двигуна.
Штучну механічну характеристику, що відповідає номінальній напрузі і ввімкненому в коло якоря двигуна резисторі з опопром Rх, будують аналогічно, користуючись відповідною штучною електромеханічною ωш=f(І) і моментною М= f(І) характеристиками. При цьому штучну електромеханічну характеристику одержують з природної шляхом перерахунку швидкостей за формулою
ωш
= ω![]()
де ω і ωш - швидкості на природній і штучній електромеханічних характеристиках, що відповідають прийнятим значенням струму якоря.
Пуск двигуна послідовного збудження здійснюють таким самими способами, як і двигунів паралельного (незалежного) збудження.Процес розгону їх відбувається також аналогічно.
Для двигунів послідовного збудження можливі два способи електричного гальмування : динамічне і противмиканням. Рекуперативне гальмування цих двигунів неможливе, тому що їх е.р.с. не може бути більшою від напруги, прикладеної до якірного кола двигуна.
Динамічне гальмування можна здійснювати при самозбудженні або незалежному збудженні.
При динамічному гальмуванні з самозбудженням якір і обмотку збудження вимикають з електричної мережі і замикають на гальмівний резистор. Між собою Їх з’єднують так, щоб напрям струму в обмотці збудження залишився таким самим, як і в двигунному режимі. В противному разі двигун розмагнічуватиметься і не створюватиме гальмівного моменту. Самозбудження двигуна має місце тільки тоді, коли е.р.с. його якоря більша від спаду напруги в якірному колі. При деякій невеликій швидкості е.р.с. і спад напруги зрівноважуються і гальмівний момент стає дуже малим. Чітка зупинка системи “електродвигун – робоча машина” неможлива.
Динамічне гальмування з незалежним збудженням, а також гальмування противмиканням здійснюється так само, як і двигунів незалежного та паралельного збуджень.
Швидкість обертання двигуна регулюють трьома способами:
1.введенням в коло якоря опору зменшуючи швидкість обертання одержуючи м’які характеристики;
2.шунтуванням якоря зменшуючи швидкість, одержуючи жорсткі характеристики;
3.шунтуванням обмотки збудження збільшуючи швидкість обертання/
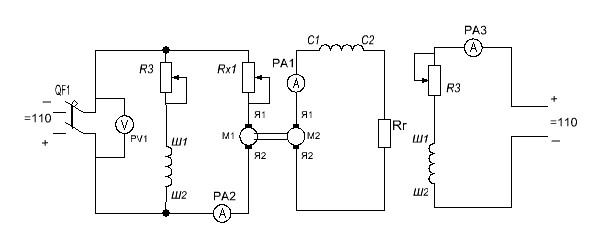
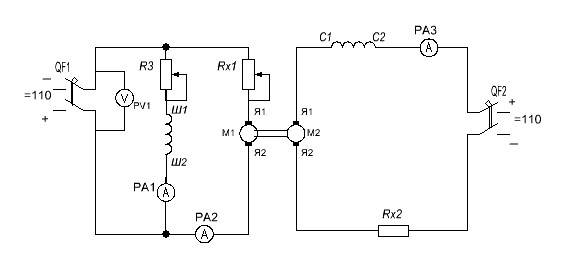
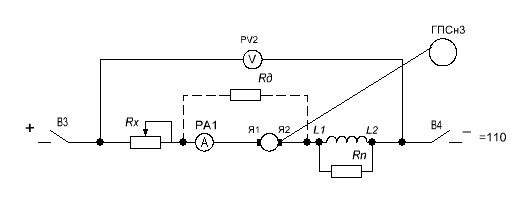
Рис.1. Схеми ввімкнення двигуна постійного струму послідовного збудження.
а) при дослідженні механічних і швидкісних характеристик в режимі двигуна;
б) при дослідженні механічних і швидкісних характеристик в режимі динамічного тормозіння;
в) при дослідженні механічних і швидкісних характеристик в режимі противмикання.