

Техніка безпеки при виконанні лабораторної роботи
Без дозволу керівника не проводити будь-яких вмикань або перемикань.
Перед початком збирання схеми впевнитись, що автоматичний вимикач в колі джерела електричної енергії вимкнений.
Не вмикати робочу схему під напругу до перевірки її викладачем.
При вмиканні схеми попередити товаришів по бригаді.
Не доторкатись до струмопровідних частин, які є під напругою.
Виправлення в схемах проводити тільки після вимкнення напруги.
Порядок виконання
Ознайомитися з обладнанням робочого місця. Записати паспортні дані електродвигуна і електричних апаратів які використовуються в схемі.
Перевірити відповідність апаратури управління по номінальних даних керуючого двигуна.
Зробити розрахунок пускового опору для даного двигуна.
Зібрати і перевірити в роботі схему керування асинхронним двигуном з обмеженням пускового моменту.
Зміст звіту
Записати, мету, порядок виконання.
Зарисувати схему пуску асинхронного двигуна з обмеженням пускового моменту.
Записати необхідні формули і зробити розрахунок пускового опору.
Контрольні питання
Для чого обмежують пусковий момент?
Чому необхідно знати формулу пускового опору?
Література
Олійник B.C. «Електропривід і електрообладнання сільськогосподарських машин і агрегатів» К.»Урожай», 1977р.
Олійник B.C. «Пракикум по автоматизованому електроприводу» М. «Колос».
При виконанні лабораторної роботи студент повинен
Знати:
Методи обмеження пускового моменту.
Значення вмикання опору Rr0 в одну із фаз асинхронного електродвигуна.
Вміти:
1. Розраховувати велечину пускового опору Rr0.
2. Збирати схему пуску асинхронного двигуна з обмеженням пускового моменту.
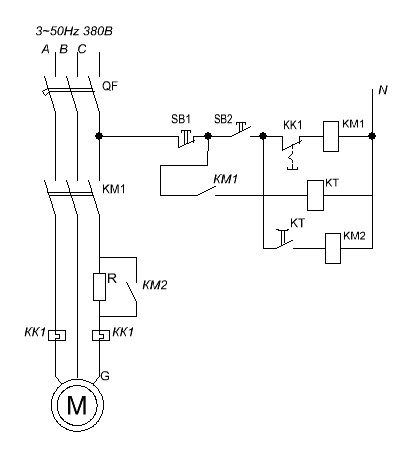
Рис.1. Схема керування асинхронного електродвигуна з обмеженням пускового моменту.
Лабораторна робота. №8
Тема: Дослідження механічних характеристик асинхронного двигуна при живленні від перетворювача частоти
Мета: Ознайомитися з асинхронним двигуном і схемою ввімкнення. Зняти механічні характеристики асинхронного двигуна.
Обладнання: асинхронний двигун, амперметр, тахометр, частотний перетворювач.
Програма роботи.
1. Ознайомитися з досліджуваним двигуном і устаткуванням робочого місця. Записати номінальні дані двигуна і інших машин.
2.Розрахувати за каталожними даними механічну характеристику двигуна
3.Досліджувати
характеристики, але при напрузі не
рівній номінальній (U
= 0,9
U![]() .
; 0,8 U
)
в двигунному режимі.
.
; 0,8 U
)
в двигунному режимі.
4.Випробувати режим динамічного гальмування.
5.За
даними дослідів і розрахунків побудувати
на графіку залежності n=![]() (М)
і оформити звіт.
(М)
і оформити звіт.
Методичні вказівки.
Трифазні асинхронні електродвигуни мають найбільше розповсюдження в народному господарстві. Механічні характеристики n= (М) різні для різних модифікацій електродвигунів. Двигуни загального застосування випускаються з нормальною характеристикою, з підвищеним пусковим моментом і підвищеним ковзанням. Двигуни кранів мають підвищені в порівнянні з нормальними двигунами максимальні і пускові моменти. Розрахунок механічних характеристик асинхронних двигунів за каталожними даними можливий, хоча обчислення виходять громіздкі. Тільки для деяких типів двигунів (наприклад, кранах) механічні характеристики приводяться в каталогах. Для розрахунку механічних характеристик необхідні наступні каталожні величини:
а)номінальна потужність на валу двигуна Рн, кВ;
б)номінальна швидкість обертання nн, об/хв
в)кратність
максимального моменту
![]()
г)
кратність пускового моменту
![]()
На підставі цих даних знаходять номінальний момент двигуна:
![]()
![]()
Максимальний момент двигуна визначають по за данному відношенню:
![]()
М![]() =
=![]()
Номінальне ковзання визначають по формулі:
![]()
де
n![]() - синхронна швидкість обертання.
- синхронна швидкість обертання.
Допоміжну
величину
![]() знаходять по формулі:
знаходять по формулі:
![]()
Механічну характеристику асинхронного двигуна розраховують по формулі:
де
S![]() - критичне ковзання (ковзання, відповідне
максимальному моменту). Величини
S
і q не дані в каталогах. Якщо прийняти,
що
r
- критичне ковзання (ковзання, відповідне
максимальному моменту). Величини
S
і q не дані в каталогах. Якщо прийняти,
що
r![]() і
х
і
х![]() при
зміні
ковзання від 1 до 0 залишаються постійними,
то можна користуватися такими формулами
для
S
і q:
при
зміні
ковзання від 1 до 0 залишаються постійними,
то можна користуватися такими формулами
для
S
і q:


Підставляючи знайдені значення величин S і q у формулу для обертаючого моменту, і задаючись значенням S= 0 ... 1, знаходять значення моменту двигуна при різних ковзаннях.
Розрахована таким чином механічна характеристика дійсна при номінальній напрузі на двигуні. При іншій напрузі на двигуні момент, що обертає, змінюється пропорційно квадрату прикладеної напруги:
![]()
Швидкість обертання асинхронного електродвигуна можна регулювати зміною частоти і числом пар полюсів обмотки, це витікає з формули:
![]()
де f- частота мережі;
р - число пар полюсів.
Для асинхронного двигуна з властиві наступні види гальмування:
а)гальмування з рекуперацією енергії в мережу (генераторне) при збільшенні швидкості обертання ротора вище синхронною: n>nс;
б)гальмування противмикання (при роботі двигуна змінюють напрям обертання поля статора, що обертається);
в)динамічне гальмування при збудженні статора постійним струмом. Струм збудження дають в 3-4 рази більший струму холостого ходу в трифазному режимі при номінальній напрузі на статорі.
Зразкові механічні характеристики асинхронного двигуна з короткозамкнутим ротором показані на рисунку 1.
Момент дослідного двигуна, що обертає, визначають по формулі:
М=С![]() (І
(І![]() І
І![]() )
)
де С - коефіцієнт момента.
![]()
де
R![]() -
опір
ротора двигуна;
-
опір
ротора двигуна;
U-напруга ротора;
n- швидкість обертання ротора.
Швидкість обертання вимірюють електротахометом.
Оскільки досліджуваний двигун працює в режимі великих ковзань, для щоб уникнути перегріву обмоток його включають на напругу 220 В, при з’єднанні обмоток зіркою (при номінальній напрузі двигуна 380/220 В). У ланцюг статора включають амперметр і вольтметр.
Напруга на статорі досліджуваного двигуна повинна залишатися незмінною. Для регулювання напруги, що підводиться до двигуна, і дослідження характеристик двигуна при різній напрузі використовують регулювальний автотрансформатор РНТ або потенціал-регулятор.
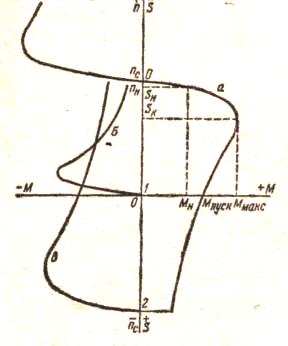
Мал. 14. Механічні характеристики трифазного асинхронного електродвигуна з короткозамкнутим ротором:
а - природна характеристика; б - характеристика динамічного гальмування при збудженні статора постійним струмом; в – природна характеристика при зміному напрямі обертання.
.
Дані дослідів заносять в таблицю.
Швидкість обертання n, об\хв. |
Напруга на статорі Ucт., В |
Струм Ін.м. А. |
Струм
І |
Момент
|
Момент
|
Назва режиму |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Порядок побудови механічної характеристики
Записуємо номінальні дані електричного двигуна: Рн = 5,5кВт; nн = 710 об/хв.; µпус= 1,8; µмін=1,4; µкр=2,2.
Механічну характеристику електричного двигуна будуємо за п’ятьма точками, користуючись паспортними даними:
точка синхронного холостого ходу (М = 0; S = 0);
точка номінального навантаження (М = Мн; S = Sн);
Мн=9,55 ∙ Рн/ nн = 9,55 · 5500 / 710 = 74 н·м.
Sн= nо – nн / nо,
де nо – швидкість синхронного холостого ходу електричного двигуна, об/хв.;
Sн= 750 – 710 / 750 = 0,053.
точка максимального навантаження (М = Мкр; S = Sк);
Мкр = µкр · Мн,
де µкр – кратність максимального навантаження;
Мкр = 2,2 · 74 = 163 н·м.
Sк
= Sн
(µкр
·
![]() µкр2
– 1) = 0,053 ( 2.2 +
2,22
– 1) = 0,22.
µкр2
– 1) = 0,053 ( 2.2 +
2,22
– 1) = 0,22.
точка мінімального навантаження (М = Ммін; S= Sмін);
Sмін = 0,8;
Ммін = µмін · Мн,
де µмін – кратність мінімального навантаження;
Ммін = 1,4 · 74 = 104 н·м.
5) точка початку пуску (М = Мп; S = Sп);
Мп = µп · Ман,
де µп – кратність пускового моменту;
Мп = 1,8 · 74 = 133 н·м.
Розраховуємо штучну механічну характеристику електродвигуна при зниженні напруги на 5% від номінальної:
Мн1 = Мн (U1 / Uн)2 = Мн · 0,952 = 74· 0,952 = 67 н·м.
Мкр1 = Мкр (U1 / Uн)2 = Мкр · 0,952 = 163· 0,952 = 147 н·м.
Мп1 = Мп (U1 / Uн)2 = Мп · 0,952 = 133· 0,952 = 120 н·м.
Ммін1 = Ммін (U1 / Uн)2 = Ммін · 0,952 = 104· 0,952 = 94 н·м.
Розраховуємо штучну механічну характеристику електродвигуна, яку допускає ГОСТ 183-74 при відхиленні моментів: МП= – 15%, Ммін = – 20%; Мкр = – 10%.
Мкр1І = МкрІ – 10% = 147 – 14,7 = 132 н·м.
Ммін1І = МмінІ – 20% = 94 – 9,4 = 84,5 н·м.
Мп1І = МпІ – 15% = 120 – 12,0 = 108 н·м.
Так як на механічній характеристиці робочої машини по осі ординат взято не ковзання s, а кутову швидкість w, то зробимо перерахунок за формулою:
w = wo · (1 – S),
де wо – швидкість синхронного холостого ходу,
wо = 2 π · f / p,
де f – частота в мережі, гц;
p – кількість пар полюсів.
wн = 2 · 3,14 · 50 / 4 =78,5 рад/с.
5) точка початку пуску (М = Мп; S = Sп);
Мп = µп · Ман,
де µп – кратність пускового моменту;
Мп = 1,8 · 74 = 133 н·м.
Розраховуємо штучну механічну характеристику електродвигуна при зниженні напруги на 5% від номінальної:
Мн1 = Мн (U1 / Uн)2 = Мн · 0,952 = 74· 0,952 = 67 н·м.
Мкр1 = Мкр (U1 / Uн)2 = Мкр · 0,952 = 163· 0,952 = 147 н·м.
Мп1 = Мп (U1 / Uн)2 = Мп · 0,952 = 133· 0,952 = 120 н·м.
Ммін1 = Ммін (U1 / Uн)2 = Ммін · 0,952 = 104· 0,952 = 94 н·м.
Розраховуємо штучну механічну характеристику електродвигуна, яку допускає ГОСТ 183-74 при відхиленні моментів: МП= – 15%, Ммін = – 20%; Мкр = – 10%.
Мкр1І = МкрІ – 10% = 147 – 14,7 = 132 н·м.
Ммін1І = МмінІ – 20% = 94 – 9,4 = 84,5 н·м.
Мп1І = МпІ – 15% = 120 – 12,0 = 108 н·м.
Так як на механічній характеристиці робочої машини по осі ординат взято не ковзання s, а кутову швидкість w, то зробимо перерахунок за формулою:
w = wo · (1 – S),
де wо – швидкість синхронного холостого ходу,
wо = 2 π · f / p,
де f – частота в мережі, гц;
p – кількість пар полюсів.
wн = 2 · 3,14 · 50 / 4 =78,5 рад/с.