

Синусоїдальний сигнал.
Найпростішим прикладом змінної аналогової напруги є синусоїда. Такий сигнал характеризується тільки двома параметрами - амплітуда і частота. Нульова лінія синусоїдальної змінної напруги розташовується рівно посередині сигналу.
Необхідно відмітити, що більшість сигналів змінної напруги значно відрізняються від чистого синусоїдального. У автомобільній електроніці близькими до синусоїдального є сигнали, згенеровані магнітними датчиками положення зубчастих коліс.
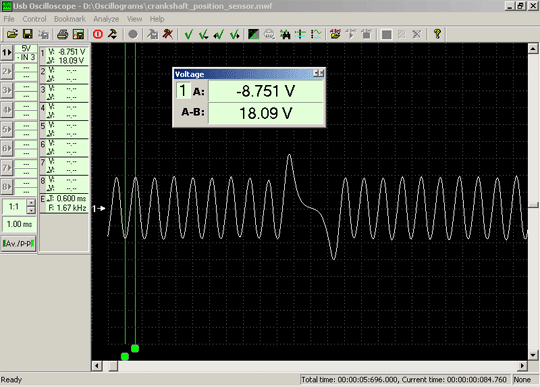
Осцилограма вихідної напруги датчика положення/частоти обертання колінчастого валу встановленого навпроти зубчастого колеса з двома не вистачає зубами.
A: - значення напруги у момент часу вказаний маркером;
A - B: - значення різниці напруги між двома вказаними маркерами моментами часу.
Подібні сигнали генерують деякі датчики швидкості обертання колінчастого валу, розподільного валу, швидкості обертання коліс.
Цифровий сигнал.
Цифрові сигнали від аналогових відрізняються наявністю тільки двох рівнів напруги - "високий"/"низький", "включено"/"вимкнено", "1"/"0". Такі рівні напруги цифрового сигналу називаються "Логічними рівнями". В більшості випадків, логічні рівні цифрового сигналу мають точні значення напруги, наприклад +5 Вольт і 0 Вольт.
Осцилограма вихідної напруги активного цифрового датчика частоти обертання колінчастого валу. A: - значення напруги у момент часу вказаний маркером. В даному випадку відповідає напрузі високого рівня цифрового сигналу і складає +5 Вольт.
Цифрові сигнали генеруються ключами (вимикачами). Роль ключів виконують транзистори, що перемикаються між станами "відкритий"/"закритий". Іноді цифрові сигнали генеруються механічними ключами - механічними вимикачами, перемикачами, електромеханічними реле. Прикладами цифрових сигналів автомобільній електроніці можуть служити датчик Холу, датчики крайніх положень дросельної заслінки, активні датчики положення/частоти обертання колінчастого/розподільного валу.
Але переважно, цифрові сигнали використовуються в обчислювальній техніці, у тому числі і в цифрових блоках управління електронними системами автомобілів.
Хід роботи :
1. Заміряти за допомогою преподователя сигнал на ШИМе зафіксувати в пам'ять осцилографа
визначити: амплітуду, частоту, період, шпаруватість сигналу. Замалювати в зошиті.
2. Заміряти сигнал на одному з польових транзисторів на ( стоці, витоку, затворі), котушці індуктивності, конденсаторі в ланцюзі живлення південного моста і ланцюга живлення процесора. Занести результати вимірів в таблицю.1
Елемент виміру |
Форма сигналу |
Амплітуда |
Частота |
Шпаруватість |
ШИМ |
|
|
|
|
Ланцюг живлення роцессора : |
|
|
|
|
Польовий транзистор |
|
|
|
|
Конденсатор |
|
|
|
|
Котушка індуктивності |
|
|
|
|
Ланцюг живлення південного моста : |
|
|
|
|
Польовий транзистор |
|
|
|
|
Конденсатор |
|
|
|
|
Котушка індуктивності |
|
|
|
|
Таблиця 1. Результати вимірів.