

Булев алгебрасы математикалык жуйе ретнде
Булев
алгебрасы деп
еки бинарлы
операциясы ![]() (аналог конъюнкции),
(аналог конъюнкции), ![]() (аналог дизъюнкции), унарной
операциясы
(аналог дизъюнкции), унарной
операциясы ![]() (аналог отрицания)
жане еки белгиленген элементи бар А
копмушеси аталады. 0 жок 1
(аналог отрицания)
жане еки белгиленген элементи бар А
копмушеси аталады. 0 жок 1
Буль алгебрасы:
1а.
 ;
2а. х+0=х; 3а. х+1=1; 4а. х+х=х; 5а. х+
;
2а. х+0=х; 3а. х+1=1; 4а. х+х=х; 5а. х+ =1;
6а. (
=1;
6а. ( )=х;
)=х;
7а.
х+у=у+х; 8а. ху+х=х; 9а. х+
у=х+у;
10а. ( )=
)= ;
;
11а. (х+у)+z=x+(y+z)=x+y+z; 12а. x+yz=(x+y)(x+z).
1б.
 ;
2б.
;
2б.
 ;
3б.
;
3б. ;
4б.
;
4б. ;
5б.
;
5б.
 ;
6б.
7б.
ху=ух;
8б.
х(х+у)=х;
9б.
;
6б.
7б.
ху=ух;
8б.
х(х+у)=х;
9б.
 ;
10б.
;
10б.
 ;
;
11б. (ху)z=x(yz); 12б. x(y+z)=xy+xz
Баскару шиналары. Адрестик шиналары
Басқару шинасы (Шина управления; control bus) — басқару сигналдары мен бақылау сигналдарын жеткізуге арналған жалпы шинаның бөлігі. 2 багытты жели
Адрестік шина (Адресная шина; address bus) — жад адресін жеткізуге бөлінген жалпы шинаның бөлігі немесе енгізу-шығару порты. 1 багытты жели
Бес динамикалык буын
Пропорционалдық буын (инерциясыз)динамикалық теңдеуінің статика теңдеуінен түк айырмашылығы жоқ. Хшығ=кХкір к-беріліс коэфф
X кір,
Хшыг К=Uшығ/w=B/
кір,
Хшыг К=Uшығ/w=B/
Хшыг W(p)=K
Хкір
 T
T
Рычаг,редуктор,электронды лампа
Апериодикалық буында шығыс шама жаңа мәнге tбойынша өзгертіледі.


 ԏ
ԏ
W(p)=K+/Tp+1


Тербелмелі буындар шығыс жаңа мәнге tбойынша бірнеше тербеліс жасап келеді де тұрақтанады.Оның көрсеткіштері: уақыт тұрақтысы, тыныштану дәреждесі, алу коэф ᶓ ,
L

 =ᶓ/T.
W(p)=K/T12p+T2p+1;
Т2=2ᶓT1.
=ᶓ/T.
W(p)=K/T12p+T2p+1;
Т2=2ᶓT1.
В Хшыг
А Хкир
 Т
Т
И
 нтегралдық
буындар кіріс және шығыс шаманы орныққан
негізіндегі қатынасы анық емес, өйткені
: кіріс шама тұрақты болған кезде, шығыс
тұрақты ῡ-пен үзіліссіз өседі. Немесе
шығыс сигналдардың өсу ῡ-ң кіріс
шаманың мәніне қатынасы.
нтегралдық
буындар кіріс және шығыс шаманы орныққан
негізіндегі қатынасы анық емес, өйткені
: кіріс шама тұрақты болған кезде, шығыс
тұрақты ῡ-пен үзіліссіз өседі. Немесе
шығыс сигналдардың өсу ῡ-ң кіріс
шаманың мәніне қатынасы.
Хшығ К=1/Т
К=ῡшыг/Хкир
W(p)=K/Tp
 Хкір
Хкір

Д
 ифференциалды
буыннын шыгыс шамасы кирис шаманын
озгеру жылдамдыгына пропорционал
ифференциалды
буыннын шыгыс шамасы кирис шаманын
озгеру жылдамдыгына пропорционал

Хкір
Хшығ
Гидравликалық ом. Динамикалық қасиеті.
С ұйықтықта
қолд-ы. Мұнай фракцияларынан н/е
синтетикалық өнімдерінен жасалады.
Цилиндр сұйықтық н/е газ энергиясын
поршень қозғалысына түрлендіреді.
Қозғалыс қысым түсуінен б/ды. Поршень
цилиндр ішінде алдыға артқа қайту
орын-ды. Штакты алдыға жылжатқандағы
күш
ұйықтықта
қолд-ы. Мұнай фракцияларынан н/е
синтетикалық өнімдерінен жасалады.
Цилиндр сұйықтық н/е газ энергиясын
поршень қозғалысына түрлендіреді.
Қозғалыс қысым түсуінен б/ды. Поршень
цилиндр ішінде алдыға артқа қайту
орын-ды. Штакты алдыға жылжатқандағы
күш
-жұмысшы
қысым. Цилиндр көлденең қимасының ауданы
 D-Поршень диаметрі; d-шток диаметрі.
P2<<P1,
онда P=P1f.
Артқа P1<<Р2,
онда P=P2f.
Гидрв/қ: мембранды, поршен/і, қалақшалы
б б/ді.
D-Поршень диаметрі; d-шток диаметрі.
P2<<P1,
онда P=P1f.
Артқа P1<<Р2,
онда P=P2f.
Гидрв/қ: мембранды, поршен/і, қалақшалы
б б/ді.
Кез-келген орындаушы механизмен ПИ-реттеу заңын құру.П және И реттеу заңдарын бір мезгілде қалыптастратын реттеуіштер кеңінен қолданылады. Бұл реттеуіштер реттелуші органға реттелетін шаманың ауытқуының иннтегралына
пропорционал
ықпал етеді: U= K х+
х+ dt,
ПИ-реттеуіштердің беріліс функциясы:
W(p)= K
+
dt,
ПИ-реттеуіштердің беріліс функциясы:
W(p)= K
+ .
Құрылымы жағынан ПИ-реттеуіштер беріліс
ф-сы W(p)= K
П-реттеуіш пен беріліс ф-сы W(p)=
И-реттеуіштің параллель қосылысына
парапар.Егер ПИ-реттеуішті баптау
кезінде (Т
.
Құрылымы жағынан ПИ-реттеуіштер беріліс
ф-сы W(p)= K
П-реттеуіш пен беріліс ф-сы W(p)=
И-реттеуіштің параллель қосылысына
парапар.Егер ПИ-реттеуішті баптау
кезінде (Т )
уақыт тұрақтысының өте үлкен мәнінің
тағайындаса, онда ол П-реттеуішке
айналады. Егер реттеуішті баптау кезінде
К
-нің
өте кіші мәнін тағайындаса, онда жылдамдық
тұрғысында
)
уақыт тұрақтысының өте үлкен мәнінің
тағайындаса, онда ол П-реттеуішке
айналады. Егер реттеуішті баптау кезінде
К
-нің
өте кіші мәнін тағайындаса, онда жылдамдық
тұрғысында
 беріліс
коэффициенті бар И-реттеуішін аламыз.
Реттелетін шаманың х=х
беріліс
коэффициенті бар И-реттеуішін аламыз.
Реттелетін шаманың х=х мәнге
секірмелі өзгерісі кезінде, идеал
ПИ-реттеуіш атқарушы механизмді дереу
реттелетін шаманың х
ауытқуына
пропорционал K
х
шамаға
жылжытады. Сосын реттеуіштің атқарушы
механизмі реттелетін шаманың ауытқуына
пропорционал х
/
мәнге
секірмелі өзгерісі кезінде, идеал
ПИ-реттеуіш атқарушы механизмді дереу
реттелетін шаманың х
ауытқуына
пропорционал K
х
шамаға
жылжытады. Сосын реттеуіштің атқарушы
механизмі реттелетін шаманың ауытқуына
пропорционал х
/
Т жылдамдықпен сол бағытта тағы да жылжиды. Яғни, шаманың берілген мәннен ауытқуы кезінде реттеуіштің статикалық бөлігі лезде іске қосылып, оның интегралдық бөлігі арқылы объектіге түсіретін ықпалы біртіндеп арта бастайды. K , Т баптау параметрлері. , Т баптау параметрлері.

Реттеуіштің
кірісіне х=х
тұрақты сигнал түскен кезде (х=0) бастапқы
мезетте пропорционлдық құраушы дереу
іске қосылады да, реттеуіштің кірісінде
U =K
х
сигналы пайда болады. Одан ары заңдылықпен
интегралдық құраушының шығыстық сигналы
сызықты түрде өсе отырып t=T кезінде
U
=K
х
сигналы пайда болады. Одан ары заңдылықпен
интегралдық құраушының шығыстық сигналы
сызықты түрде өсе отырып t=T кезінде
U =2K
х
мәнге жетеді. ПИ-реттеу заңдылығы бар
реттеуіштің изодром уақыт тұрақтсы деп
реттеуіштің интегралдық(астатикалық)
бөлігінің әсерінен реттеу заңының
пропорционалдық (статикалық) құрамасы
мәнінің екі есе артқанға дейін кететін
уақытты айтады. K
>1
болған кездегі ПИ-реттеу заңы
орындалады.Егер K
<1
болса, нда 1-ПИ-реттеу заңының интегралдық
құраушысының
=2K
х
мәнге жетеді. ПИ-реттеу заңдылығы бар
реттеуіштің изодром уақыт тұрақтсы деп
реттеуіштің интегралдық(астатикалық)
бөлігінің әсерінен реттеу заңының
пропорционалдық (статикалық) құрамасы
мәнінің екі есе артқанға дейін кететін
уақытты айтады. K
>1
болған кездегі ПИ-реттеу заңы
орындалады.Егер K
<1
болса, нда 1-ПИ-реттеу заңының интегралдық
құраушысының
 көлбеу бұрышы 2-ПИ-реттеу заңының
интегралдық құраушысының
көлбеу бұрышы 2-ПИ-реттеу заңының
интегралдық құраушысының
 көлбеу бұрышынан үлкен болады. 1түзу 2
түзуден жоғары өтеді. Автоматты реттеу
жүйесінде идеал ПИ-реттеуішті интегралдауыш
буынды П-реттеуіштің пропорционал
бөлігіне параллель қосу арқылы алуға
болады. Нақты ПИ-реттеуішті құрылымдық
схема түрінде алуға болады. Схемада W
көлбеу бұрышынан үлкен болады. 1түзу 2
түзуден жоғары өтеді. Автоматты реттеу
жүйесінде идеал ПИ-реттеуішті интегралдауыш
буынды П-реттеуіштің пропорционал
бөлігіне параллель қосу арқылы алуға
болады. Нақты ПИ-реттеуішті құрылымдық
схема түрінде алуға болады. Схемада W (p)= K
пропорционалдық буын мен W
(p)= K
пропорционалдық буын мен W (р)=1/
T
(p)
интегралдауыш орындаушы механизм
реттеуіштің тура тізбегінде серпімді
кері байланыспен қамтылған W
(р)=1/
T
(p)
интегралдауыш орындаушы механизм
реттеуіштің тура тізбегінде серпімді
кері байланыспен қамтылған W (р)=К
T
/(
T
p+1).
Беріліс функция W(p)=
(р)=К
T
/(
T
p+1).
Беріліс функция W(p)= =
=
 .
Осылайша нақты ПИ-реттеуішті идеал
пропорционалдық-интегралдық W(p) және Т
уақыт тұрақтысы бар W(p) апериодтық
динамикалық буындардың тізбектей
жалғасуы түрінде қарастыруға болады.
Сол себепті уақыт өтуінен изодром
уақытын баптау үшін реттеуіштің
статикалық бөлігінің Т беріліс
коэффициентін де оған сәйкес үйлестіру
қажет.
.
Осылайша нақты ПИ-реттеуішті идеал
пропорционалдық-интегралдық W(p) және Т
уақыт тұрақтысы бар W(p) апериодтық
динамикалық буындардың тізбектей
жалғасуы түрінде қарастыруға болады.
Сол себепті уақыт өтуінен изодром
уақытын баптау үшін реттеуіштің
статикалық бөлігінің Т беріліс
коэффициентін де оған сәйкес үйлестіру
қажет.
Кез-келген орындаушы механизмен ПИД-реттеу заңын құру. Мұндай реттеуіштер реттеу объектісіне реттелетін шаманың х ауытқуына, осы ауытқу интегралына және реттелетін шаманың өзгеру жылдамдығына пропорционал әсер етеді.
U=
K
х+
dt+Т .
ПИ және ПД-реттеу заңдары тәрізді
ПИД-реттеуіштің де құрылымдық схемасы
реттеу заңының әртүрлі құраушыларына
ортақ коэффициенті бар түрде болуы
мүмкін. ПИД-реттеуіштің беріліс ф-сы:
W(p)= K
+
+Т
.
ПИ және ПД-реттеу заңдары тәрізді
ПИД-реттеуіштің де құрылымдық схемасы
реттеу заңының әртүрлі құраушыларына
ортақ коэффициенті бар түрде болуы
мүмкін. ПИД-реттеуіштің беріліс ф-сы:
W(p)= K
+
+Т р.
р.
Реттелетін
шама секірмелі өзгергенде, идеал
ПИД-реттеуіш бастапқы сәтте реттеу
объектісіне шексіз ықпл етеді, содан
кейін ықпал ету шамасы реттеуіштің
пропорционалдық бөлігімен анықталатын
мәнге дейін лезде төмендейді де, одан
әрі ПИ-реттеуіштегідей өз ықпалын
реттеуіштің астатикалық бөлігі білдіре
бастайды.ПИД-реттеуіштің баптау
параметрлері болып реттеуіштің
K
пропорционалдық
коэффициенті,пропорционалдық коэффициенті,
интегралдаудың Т
уақыт
тұрақтысы және дифференциалдаудың
Т уақыт
тұрақтысы болып табылады. ПИД-реттеуіштің
баптау параметрлеріне Т
,
K
,
Т
уақыт
тұрақтысы болып табылады. ПИД-реттеуіштің
баптау параметрлеріне Т
,
K
,
Т жатады. Баптау мүмкіндігіне қарай
ПИД-реттеуіштер бсқа реттеуіштермен
салыстырғанда барынша жетілген.Оның
көмегімен реттеудің түрлі заңдарын
жүзеге асыруға болады. Мысалы:
жатады. Баптау мүмкіндігіне қарай
ПИД-реттеуіштер бсқа реттеуіштермен
салыстырғанда барынша жетілген.Оның
көмегімен реттеудің түрлі заңдарын
жүзеге асыруға болады. Мысалы:
Т
=0
және Т
шексіз
үлкен мәнінде П-реттеуішті аламыз. K
=0
және Т
=0
кезінде И-реттеуішті, K
=0
және Т
= кезінде
Д-реттеуішті, Т
=0
кезінде ПИ-реттеуішті,Т
-дің
шексіз үлкен мәнінде және Т
мен
K
шекті
мәндерінде болғанда ПД-реттеуішті
аламыз.
кезінде
Д-реттеуішті, Т
=0
кезінде ПИ-реттеуішті,Т
-дің
шексіз үлкен мәнінде және Т
мен
K
шекті
мәндерінде болғанда ПД-реттеуішті
аламыз.
Импульс санауыштары. Екілік қосқыш санауыштар.
Ақпараттарды сандық өңдеу импульстар санында көп таралған.Бұл құрылғыларда өлшеу көрсеткіштері,бұрылу бұрышы жиілік
жылдамдык,уақыт
т.б.Кернеу импульстарына айналдырады
және оның саны сәйкес масштабты осы
көрсеткіш мәнінің мінездемесі болады.Осы
импульста импульс санауышпен есептеліп
сан түрінде көрсетіледі. Санауыш
мақсатына қарай қарапайым және реверсивті
болып бқлінеді. Қолдану мақсатында
қарай пайым санауыштар қосушы және
алушы болып бөлінеді. Қосушы санауыштар
тура бағытта санауды орындайды.Яғни
қосуға арналған. Санауыш кірісінде
кезекті импульс жетуімен ,оның көрсеткіші
бірге өседі.Алушы санауыштар кері
бағытта санауды орындауға, яғни алуға
арналған. Алушы санауыш өзінің кірісіне
жеткен импуьсті бірге азайтады. Реверсивті
санауыш тура бағыттада ,кері бағыттада
санау өзгерген орындауға арналған.,яғни
олар «+» және «-» режиміндеде жұмыс
істей алады. Санауыштардың негізі
көрсеткіштері санақ модулі санақ
коэффициенті және шапшаңдығы болады.
Санақ коэффициенті санағыш санаған
импульстарын көрсетеді.Санауыш шапшаңдығы
санақ импульсі жүрісінің максималды
жиілігінен және онымен байланысты.
Тұрақты санау уақытымен мінезделеді.Кіріске
әр санақ импульсі келгенде барлық
санағыш разрядтары өтпелі процестерді
 (максималды
уақыт) атқарады. Импульс санағышта
екілік санау жүйесін пайдалану арқылы
іске асырылады. Импульс санауыштар
триггерлер негізінде орындалады.
(максималды
уақыт) атқарады. Импульс санағышта
екілік санау жүйесін пайдалану арқылы
іске асырылады. Импульс санауыштар
триггерлер негізінде орындалады.
Екілік қосқыш санауыштар.
Екілік
санауыштар импульстарда екілік санау
жүйесінде санайды. Екілік санағыштың
негізгі түйіні санақ қосқыщты триггер.
Ол импульстің екілік модулі бойынша
санайды. Көп разрядты екілік қосушы
тура байланысты санауыштар санағыш
триггерді тізбектей қосу арқылы
орындалады.Санақ импульстары бірінші
триггердің санақ кірісіне беріледі.Келесі
триггердің санақ кірісін оның алдындағы
триггердің шығысымен тура байланысқан.
Ішкі кешігуі бар триггерлер санақ
триггерлері н разрядты санағышқа
қарастырылады. Импульстар келер алдында
санағыштың барлық разрядтары 0-ді орнату
импульсті беру арқылы 0 күйінде
болады.Бірінші санақ импульсі келіп
жеткенде бірігуші разряд қарама-қарсы
күйіне ауытқиды және кіріс импульсі
біткенде .Q=1 -ге ауысады. Санағышта
бірінші сан жазылады.(00001). Q1 асығындағы
1 деңгейі 2-ші разряд кірісіне әсер
етеді.Санағыштарда 2 деген сан
жазылады.Екілік жұмыс кезінде импульсті
жүріс жиілігі кіріс импульстарда жүріс
жиілігімен салыстырғанда әрбір келесі
триггерде 2 есе кіші.Схеманың бұл
қасиетін жиілік бөлгішті құру үшін
қолданылады, кіріс және шығыс жиілігі
бір-бірімен
 қатынасымен байланысқан.
қатынасымен байланысқан.
Интерфейс. Енгізу шығару порттары.
Жалпыға бірдей қабылданған келісімге сәйкес енгізу және шығару ақпараттарынан ағымдық бағыты микорпроцестерге қатысты қарастырылады. Сондықтан енгізу порты деп кез-келген деректер көзі.Мысалы деректер шинасына жалғасөан адрестелген регистердң айтуға болады. Шығару порты деп шинасына жалғанған адрестелген регистр деректерді қабылдағышты айтамыз.Көптеген микропроц-ге порттарды аддрестеу үшін(яғни керекті портты таңдау үшін ) адрестік шиналарды,оның бір бөлігі қолданылады. Көп жағдайларда енгізу порттарының адрестері шығару порттарының адресінен және жады адресінен мәні бойынша емес , сәйкес басқа жолдағы сигналмен ерекшеленеді.Енгізу және шығару басқару жолдары бойынша сигналмен ерекшеленеді. Енгізу және шығару командасын орындау кезінде байтынан алынған құрылғы коды беріледі және арнайы винтиль сегіз кіріске бер-н құрылғыны тану үшін қызмет атқарады.Винтиль кірістері адрестік шина-ң 8 кіші жолына қосылған сигналға байланысты терістеледі.(инверсияланады) және винтиль таңдау порты да таңдау үшін қолд-ды. Енгізу порты кейбір сыртқы құрылғылардан ақпарат түсетін 8 бит-к регистерден тұрады.Бұл регистордың шығысы сегіз үшстабильді арқылы мәліметтер шинасына жалғасқан.Регистор құрамы таңдау лог-қ 1-ге тең болғанда мәліметтер шинаға беріледі,яғни енгізу командасы орындалады.Порт тапсырмасы тек қана ақпаратты мәлім-р шинасына орналастыру өажетті орынға одан әрі микро-н анық-ыДерект-ң тасымалдануы енгізу ком-ң 3-ші шинасының циклінде орын-ы
Назад |
Содержание |
Вперед |
Логические элементы
Различают комбинационные схемы и цифровые автоматы. В комбинационных схемах состояние на выходе в данный момент времени однозначно определяется состояниями на входах в тот же момент времени. Комбинационными схемами, например, являются логические элементы И, ИЛИ, НЕ и их комбинации. В цифровом автомате состояние на выходе определяется не только состояниями на входах в данный момент времени, но и предыдущим состоянием системы. К цифровым автоматам относятся триггеры.
Логическими элементами называются элементы, выполняющие логические операции И, ИЛИ, НЕ и комбинации этих операций. Указанные логические операции можно реализовать с помощью контактно-релейных схем и с помощью электронных схем. В настоящее время в подавляющем большинстве применяется электронные логические элементы, причем электронные логические элементы входят в состав микросхем. Имея в распоряжении логические элементы И, ИЛИ, НЕ, можно сконструировать цифровое электронное устройство любой сложности. Электронная часть любого компьютера состоит из логических элементов.
Система простых логических функций, на основе которой можно получить любую логическую функцию, называется функционально полной.

Отсюда следует, что для построения логического устройства любой сложности достаточно иметь однотипные логические элементы, например, И-НЕ или ИЛИ-НЕ.
Логические элементы могут работать в режимах положительной и отрицательной логики. Для электронных логических элементов в режиме положительной логики логической единице соответствует высокий уровень напряжения, а логическому нулю - низкий уровень напряжения. В режиме отрицательной логики логической единице соответствует низкий уровень напряжения, а логическому нулю - высокий.
Для контактно-релейных схем в режиме положительной логики логической единице соответствует замкнутый контакт ключа или реле, а логическому нулю - разомкнутый. Светящийся индикатор (лампочка, светодиод) соответствует логической единице, а несветящийся - логическому нулю.
Логические элементы, реализующие для режима положительной логики операцию И, для режима отрицательной логики выполняют операцию ИЛИ, и наоборот. Так, например, микросхема, реализующая для положительной логики функции элемента 2И-НЕ, будет выполнять для отрицательной логики функции элемента 2ИЛИ-НЕ.
Как правило, паспортное обозначение логического элемента соответствует функции, реализуемой "положительной логикой". Логические элементы И, ИЛИ, НЕ имеют один выход, число входов логических элементов И, ИЛИ может быть любым начиная с двух. Логические элементы И и ИЛИ, выпускаемые в составе микросхем, обычно имеют 2, 3, 4, 8 входов. В названии элемента первая цифра указывает число входов.
Прежде всего, рассмотрим реализацию логических элементов с помощью контактно-релейных схем. Рассмотрим логический элемент 2И. Он выполняет операцию логического умножения. На рисунке 1.1,а приведена контактно-релейная схема логического элемента 2И для режима положительной логики.

Обозначение логического элемента 2И на принципиальных схемах показано на рисунке 1.1,б. Знак & (амперсант) в левом верхнем углу прямоугольника указывает, что это логический элемент И. Первые две буквы обозначения DD1.2 указывают на то, что это цифровая микросхема, цифра слева от точки указывает номер микросхемы на принципиальной схеме, а цифра справа от точки – номер логического элемента в составе данной микросхемы.
Функционирование логического элемента обычно задают таблицей истинности. Контактно-релейная схема логического элемента 2И (режим положительной логики) позволяет легко составить таблицу истинности этого элемента. Так как микросхема имеет для подачи входных сигналов два входа, то возможны 22=4 различных комбинации входных сигналов. Необходимо проанализировать состояние лампочки при различных положениях тумблеров Sa1, Sa2, т.е. рассмотреть 4 различных комбинации состояний тумблеров (рис. 1.1,в).
Введение понятия активного логического уровня существенно облегчает анализ функционирования сложных цифровых устройств. Активным логическим уровнем на входе элемента (логический нуль, логическая единица) называется такой уровень, который однозначно задает состояние на выходе элемента независимо от логических уровней на остальных входах элемента. Активный логический уровень на одном из входов элемента определяет уровень на его выходе. Уровни, обратные активным, называются пассивными логическими уровнями.
Активным логическим уровнем для элементов И является логический нуль. Пусть, например, имеем логический элемент 8И. Необходимо проанализировать 28=256 различных состояний для составления таблицы истинности этого элемента. Воспользуемся понятием активного логического уровня. Если хотя бы на одном из входов этого элемента будет активный логический уровень, то состояние на выходе элемента определено однозначно и нет необходимости анализировать состояния на остальных входах элемента.
Таким образом, таблицу истинности логического элемента 8И можно свести к двум строчкам: на выходе этого элемента будет логическая единица, если на всех входах будут сигналы логической единицы и на выходе будет логический нуль, если хотя бы на одном из входов элемента будет сигнал логического нуля.
Логический элемент 2ИЛИ выполняет логическую операцию логического сложения у=х1+х2. Контактно-релейная схема элемента приведена на рисунке 1.2,а, а его условное обозначение – на рисунке 1.2,б. Знание контактно-релейной схемы элемента позволяет составить таблицу истинности (рис.1.2,в). Лампочка будет гореть, если замкнуты контакты хотя бы одного тумблера, т.е. активным логическим уровнем для элементов ИЛИ является уровень логической единицы.
Логический элемент НЕ выполняет операцию отрицания, и для этого элемента проще составить сразу таблицу истинности, а не вычерчивать сначала контактно-релейную схему, а затем по ней составлять таблицу истинности. Для логических элементов И и ИЛИ проще сначала вычертить контактно-релейную схему, а уже потом составлять таблицу истинности.

Напомним алгоритм работы электромагнитного реле с нормально замкнутыми контактами: при отсутствии электрического тока через обмотку реле контакты реле замкнуты, а при протекании достаточного тока через обмотку реле контакты реле разомкнуты. Контактно релейная схема элемента НЕ приведена на рисунке 1.3а, а его условное обозначение – на рисунке 1.3б.

Проанализируем работу контактно-релейной схемы логического элемента НЕ (рис. 1.3а). Если контакты ключа Sa1 разомкнуты, то через обмотку К электромагнитного реле ток протекать не будет. Контакты К1.1 (цифра слева от точки указывает номер реле на принципиальной схеме, а цифра справа – номер контактной группы данного реле) будут замкнуты (электромагнитное реле с нормально замкнутыми контактами). Электрическая лампочка HL1 в этом случае будет гореть, что для режима положительной логики будет означать логическую единицу. При замкнутых контактах ключа Sa1 (на входе элемента логическая единица) через обмотку реле протекает ток, достаточный для размыкания контактов К1.1, поэтому лампочка перестает гореть (логический нуль). В результате анализа мы получили, что сигнал на выходе элемента противоположен сигналу на входе, т.е. если на входе элемента сигнал логической единицы, то на выходе элемента сигнал логического нуля и наоборот (рис. 1.3,в).
При анализе работы логических элементов следует помнить о режиме их работы (режим положительной или отрицательной логики). Логические элементы, реализующие для режима положительной логики операцию И, для
режима отрицательной логики выполняют операцию ИЛИ и наоборот. Решим следующую задачу.
Задача. Какую логическую операцию выполняет контактно-релейная схема, приведенная на рисунке 1.4.

Правильным ответом в этой задаче будет следующий. Указанная контактно-релейная схема выполняет операцию 3И для режима положительной логики и 3ИЛИ для режима отрицательной логики (решение обосновать самостоятельно).
В практической работе широко используются комбинации логических элементов и особенно элементы И-НЕ и ИЛИ-НЕ. Рассмотрим подробнее контактно-релейную схему элемента 2ИЛИ-НЕ, приведенную на рисунке 1.5,а. Условное обозначение элемента на принципиальных схемах показано на рисунке 1.5,б. Заполним таблицу истинности, приведенную на рисунке 1.5в. Если оба ключа разомкнуты (Х1=0, Х2=0), то лампочка HL1 горит, что соответствует логической единице на выходе элемента (Y=1). Замкнем контакты ключа Sa1 (Х1=1), оставляя ключ Sa2 разомкнутым (Х2=0). Лампочка HL1 в этом случае не горит (Y=0). Если замкнут хотя бы один ключ, то лампочка не горит. Следовательно, активным логическим уровнем на входе элемента ИЛИ-НЕ является уровень логической единицы.

Для двух аргументов логического элемента возможны 16 логических функций. В данном пособии рассматриваются логические функции: логическое И, логическое ИЛИ, логическое НЕ, логическое И-НЕ, логическое ИЛИ-НЕ, сумма по модулю 2.
В таблице 1.1 приведены условные обозначения элементов 2И, 2ИЛИ, НЕ, 2И-НЕ, 2ИЛИ-НЕ, исключающее ИЛИ (сумма по модулю 2), условные обозначения выполняемых этими элементами логических операций, таблицы их истинности и контактно-релейные схемы. При анализе контактно-релейной схемы элемента исключающее ИЛИ необходимо учитывать, что положения переключателей SA1 и SA2 в таблице 1.1 соответствуют логическим единицам (верхнее положение подвижного контакта переключателя соответствует логической единице), т.е. Х1=1 и Х2=1. Лампочка HL1 горит лишь в том случае, когда подвижный контакт одного из переключателей находится в верхнем положении, а подвижный контакт второго переключателя в нижнем положении. Из анализа работы данной контактно-релейной схемы получаем таблицу истинности элемента исключающее ИЛИ.

Микрокомпьютер (microcomputer) — микропроцессор базасында жасалған мөлшері шағын компьютер (микропроцессорлық компьютер). Микрокомпьютерлер құрамдас, дербес, шағын (столға қоятын), ықшам (портативтік), кәсіптік және түрмыстық деп бөлінеді.
Микропроцессор (МП) – бұл сандық мәліметтерді өңдеу үшін және сол өңдеу процесін бірнеше интегралды сұлбаларда басқару үшін бағдарламалы-басқарулы электронды сандық құрылғы.
Микропроцессор – программа жадында сақталатын, мәліметтер өңдеуді басқаратын функционалды тұйықталған құрылғы. Микропроцессорлардың (МП) пайда болуы интегралды электрониканың дамуының арқасында мүмкіндігі артты. Ол кішкентай және орташа интеграциялық деңгейден үлкен және өте үлкен интегралды микросхемаларға өтуге мұмкіндік берді (БИС и СБИС).
Бағдарламалык қамтамасыз ету қүрамы. Алгоритмді сипаттау тілдері. Бағдарламалау тілдерін таңдау. Бағдарламалық қамтамасыз ету сенімділігі мен сапасы. Бағдарламалық қамтамасыз етуді өндеу процессорларының моделі. Аппараттык және бағдарламалық құралдар арасындағы компромистер. Модулді бағдарламалау құрамы ретінде ішкі бағдарламалар. Микропроцессорлық котроллердегі және жүйедегі типтік функцияларды тарату.
Машиналық тіл (Машинный язык; Machine language; computer language) — 1) есеп шығаруды бейнелейтін және мазмұны мен ережелері нақты компьютердің аппараттық құралдары арқылы жүзеге асырылатын формальды тіл. Машиналық тілге аударылған программа әрбір операцияны орындауға жарайтын белгілі бір командалардан тұрады. Кейде компьютердің командалар жүйесін де машиналық тіл деп атайды; 2) компьютерде белгілі бір әрекетгер мен операцияларды екілік сан түрінде кодтау, жазу ережелерінің жинағы.
Басқарудың микропроцессорлық жүйесі
Басқарудың микропроцессорлық жүйесі (Микропроцессорная система управления; microprocessor system) — автоматтық құрылғылардан тұратынжүйе. ...
Нормалаушы түрлендіргіштер-бірінші реттік түрлендіргіштен келетін табиғи түрдегі сигналды унификациялайтын сигналға түрлендіргіш. Нт –бұл бөлек құрылғы, блок. Егер брт шығысы физикалық шама болса онда онда брт мен бірігіп бір құрылғы болады . нт ақпаратты өлшеп өңдеуге ыңғайлы таратушы және сақтау құрылғысы бірақ тура бақылау үшін арналмаған кіріс шығыс тәуелділікті қолданады
ЦСКР ж/е У элем-і. Орталықтан бақылау, реттеу ж/е басқару жүйесі. ТОУ күрделі болуына байл осындай жүйелер п/б\ды. Реттелетін көрсеткіштері көбейді. Территория б\ша үлкен орын алды. Сонд-н дистанциялық басқару (ДУ) н/е логика командалық басқару(ЛКУ) қажеттігі туындайды. Орт-н басқару ж/е бақылау пультінде бақыланатын аспаптар жиналады. Артықшылығы: ыңғайлылық ж/е сенімділігі жоғары.
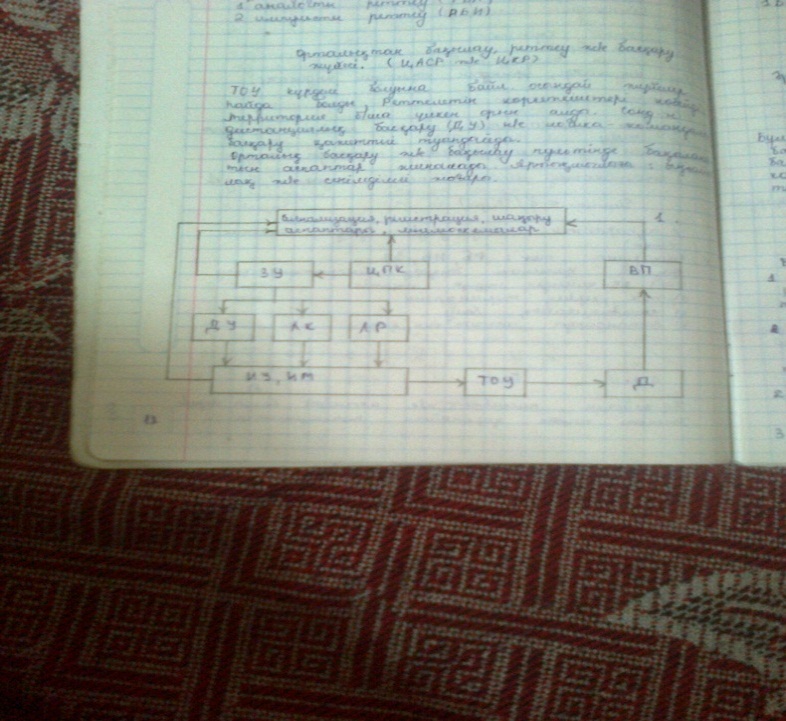
Бұл жүйеде блоктық басқару б/ды. 1блок: ЗУ-мән беруші құрылғы; ЦПК-орталықтан басқару пункті; ВП-екінші реттік түрл/ш; ЛР-локальды регулятор;ИУ-орындаушы құрылғы; ИМ-орындаушы механизм; Д-датчик.