

1.1 Какие аксиомы статики являются и основными законами механики? Сформулируйте эти аксиомы.
-закон инерции,
-закон равенства действия и противодействия,
-аксиома об условии равновесия тела под действием 2-х сил,
-аксиома о возможности присоединения к СС любой уравновешенной СС.
-аксиом о возможности замены 2-х сил, приложенных в одной точке тела одной силой-их равнодействующей.
-аксиома, согласно которой равновесие сил, приложенных к деф-му телу, не изменится,если считать тело абсолютно ТВ.
1.2 какие акс статики справедливы только для абсол ТВ тел?
Акс №3 и №4
-аксиома об условии равновесия тела под действием 2-х сил,
-аксиома о возможности присоединения к СС любой уравновешенной СС
1.3 какие 3 характеристики действия на тело силы определяет вектор силы?
-величина
-направление
-линия действия
какой вид имеет запись ф-лы разложения силы на ее составляющие по координатным осям?

сс? Какие сс называбтся эквив 0 и просто эквивалентными?
Сс-совокупность сил рассматриваемых в задачах.
Эквив- равнозначные по действию сс. F~Q
Сс эквив 0- уравновеш сс. F~0
какая сила называется равнод сс? Символы.
Равнод- эквив рассматр сс
R* ~F
проекция силы на ось.
1) проекция вектора на ось равна произведению модуля вектора на косинус угла между направлением вектора и положительным направлением оси ;
2) проекция вектора на ось является скалярной величиной и может быть как положительной, так и отрицательной;
3) знак проекции определяется знаком косинуса угла a, образуемого направлением вектора и положительным направлением оси.
При угле a < 900 проекция вектора положительна; при a = 900 равна нулю; при a > 900 - отрицательна.
На расчетных схемах, как правило, обозначаются острые углы между линией действия вектора и осью ( или параллельной оси линией). Поэтому знак проекции в каждом случае определяется сопоставлением направления проектируемого вектора и оси.
как формулируется теорема о проекции равнод сс на произв ось
Этого тупого вопр я не знаю
что понимается под связями налож на тело и под силами реакции связей?
Связи- силы с которымии окружающие лела действуют друг на друга.
Другие тела, по отношению к рассматриваемому называются его связями.
Силы же, с которыми эти тела действуют на рассматриваемое , называют силами реакции связей или просто реакциями связей.
Принцип освобождаемости от связей.
Любое несвободное тело можно рассматривать как свободное,если действие наложенных на тело связей заменить силами их реакций.
ЦИКЛ 2
2.1. Реакции каких четырех видов связей имеют вполне определенную линию действия ?
Какими символами принято их обозначать ?
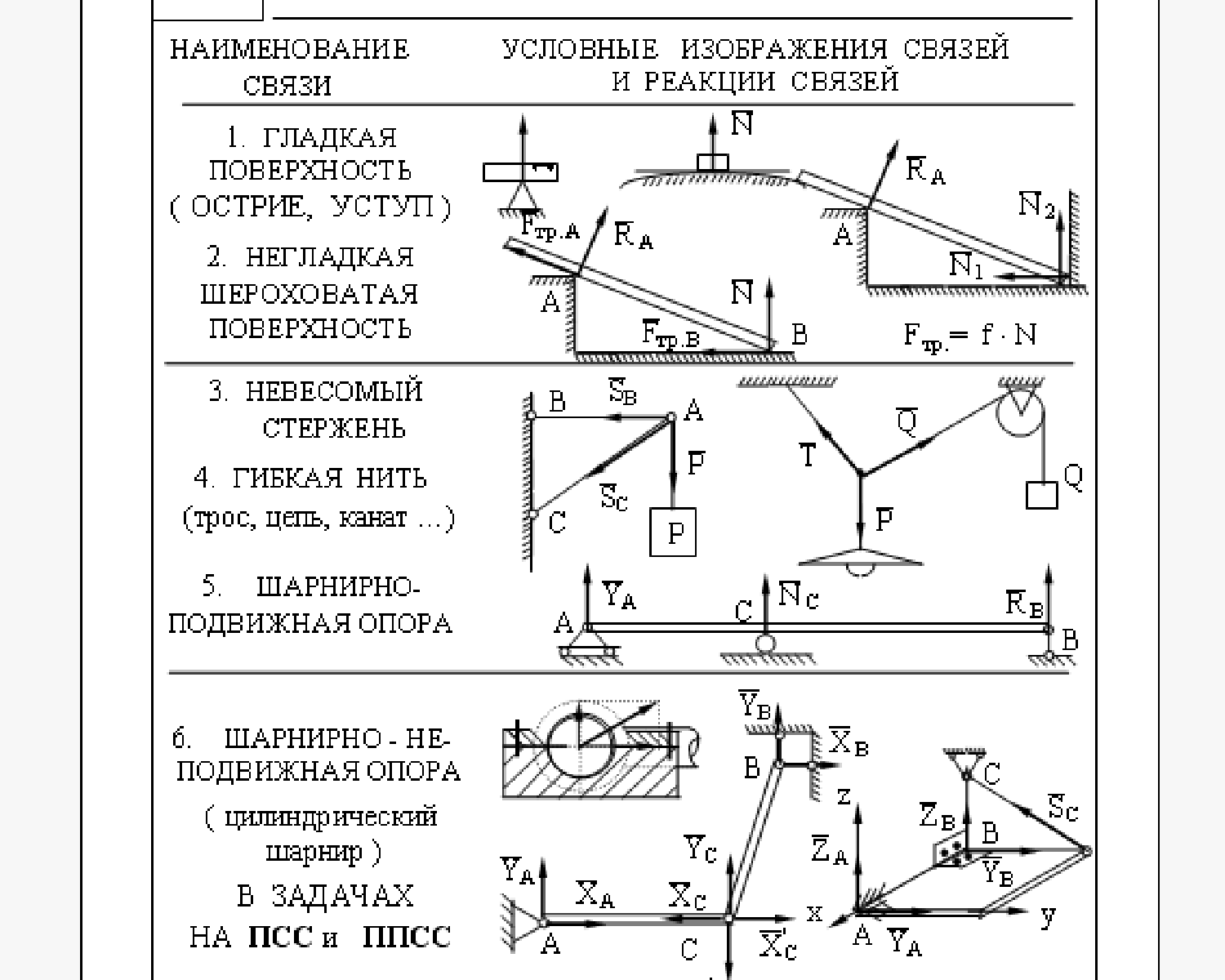
Гладкая, шероховатая, шарнирно-подв, гибкая нить
2.2. Реакции каких связей ищутся в виде трех неизвестных составляющих ?
Покажите на рисунке их условные обозначения
шаровой шарнир, подпятник, заделка
2.3. Как на расчетных схемах изображают шарнирно-неподвижные опоры на плоскую и пространственную СС ?
Думаю, не сложно взлянуть выше. В пункт шесть на вставленной картиночке.
2.4. Какое правило существует для выбора направления силы реакции невесомого стержня на рассматриваемый узел или тело.
Направляют от узла крепления к телу. + растянут, - сжат
2.5. Как направляется вектор полной реакции шероховатой поверхности ? Чему равен модуль этого вектора ?
N=Fтр Fтр=fN рисунощка нету , но быть должен
2.6. Какая связь называется защемляющей опорой или жесткой заделкой ? Каковы реакции этой связи ?
Рисунок выше! Защемляющая опора- это связь , препятствующая заданному телу перемещаться в любом из направлеений и поворачиваться относительно любой из осей координат.
2.7. Какая система сил называется системой сходящихся сил ? Каково графическое условие равновесия указанной системы сил ?
СИСТЕМУ СИЛ НАЗЫВАЮТ СХОДЯЩЕЙСЯ, ЕСЛИ ЛИНИИ ДЕЙСТВИЯ СИЛ
ПЕРЕСЕКАЮТСЯ В ОДНОЙ ТОЧКЕ.
Графическое условие равновесия: силовой многоугольник , построенный из сходящихся сил должен быть замкнут.
2.8. Каковы векторное, аналитические и графическое условия равновесия сходящейся системы сил ?
2 .9.
Как строится силовой треугольник
уравновешенной системы сил? Приведите
пример построения.
.9.
Как строится силовой треугольник
уравновешенной системы сил? Приведите
пример построения.
2.10. Как формулируется теорема о трех силах? Для каких целей используется эта теорема при решении задач ?
ЕСЛИ ПОД ДЕЙСТВИЕМ ТРЕХ НЕПАРАЛЛЕЛЬНЫХ, НАХОДЯЩИХСЯ В ОДНОЙ ПЛОСКОСТИ СИЛ ТЕЛО НАХОДИТСЯ В РАВНОВЕСИИ, ТО ЛИНИИ ДЕЙСТВИЯ СИЛ ПЕРЕСЕКАЮТСЯ В ОДНОЙ ТОЧКЕ .
На основании теоремы определяется линия действия одной из неизвестных сил, когда линии действия двух других действующих на рассматриваемое тело сил известны.
3.1. Что понимается под вектором-моментом силы относительно точки?
Покажите этот вектор вместе с точкой и силой на рисунке.
![]() ВЕКТОРОМ
- МОМЕНТОМ СИЛЫ ОТНОСИТЕЛЬНО ТОЧКИ и
обозначается как .
ВЕКТОРОМ
- МОМЕНТОМ СИЛЫ ОТНОСИТЕЛЬНО ТОЧКИ и
обозначается как .
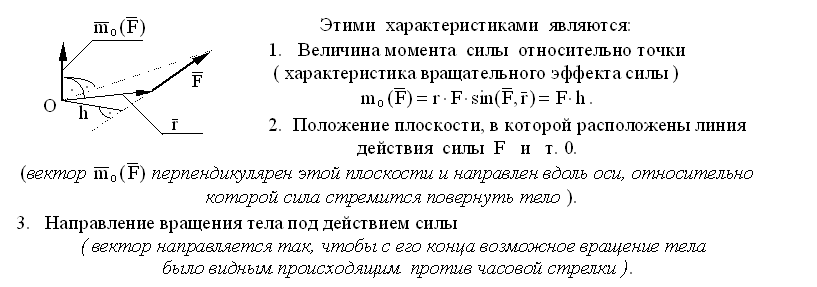 Под
вектором-моментом силы относительно
точки понимается вектор, определяемый
векторным произведением радиус-вектора
силы - ( вектора, проведенного из центра
0 в любую точку на линии действия силы)
на вектор самой силы - .
Под
вектором-моментом силы относительно
точки понимается вектор, определяемый
векторным произведением радиус-вектора
силы - ( вектора, проведенного из центра
0 в любую точку на линии действия силы)
на вектор самой силы - .
3.2. Какие три характеристики действия силы на тело определяет вектор-момент силы относительно
закрепленной точки тела ?
См выше
3.3. Каким векторным выражением определяется вектор-момент силы относительно точки ? Покажите называемые векторы на рисунке.
См 3.1 и 3.2
3.4. Как определить величину момента силы относительно точки через радиус-вектор точки приложения силы и его угол с вектором силы?
Mo(F)=rsin(F,r)=Fh
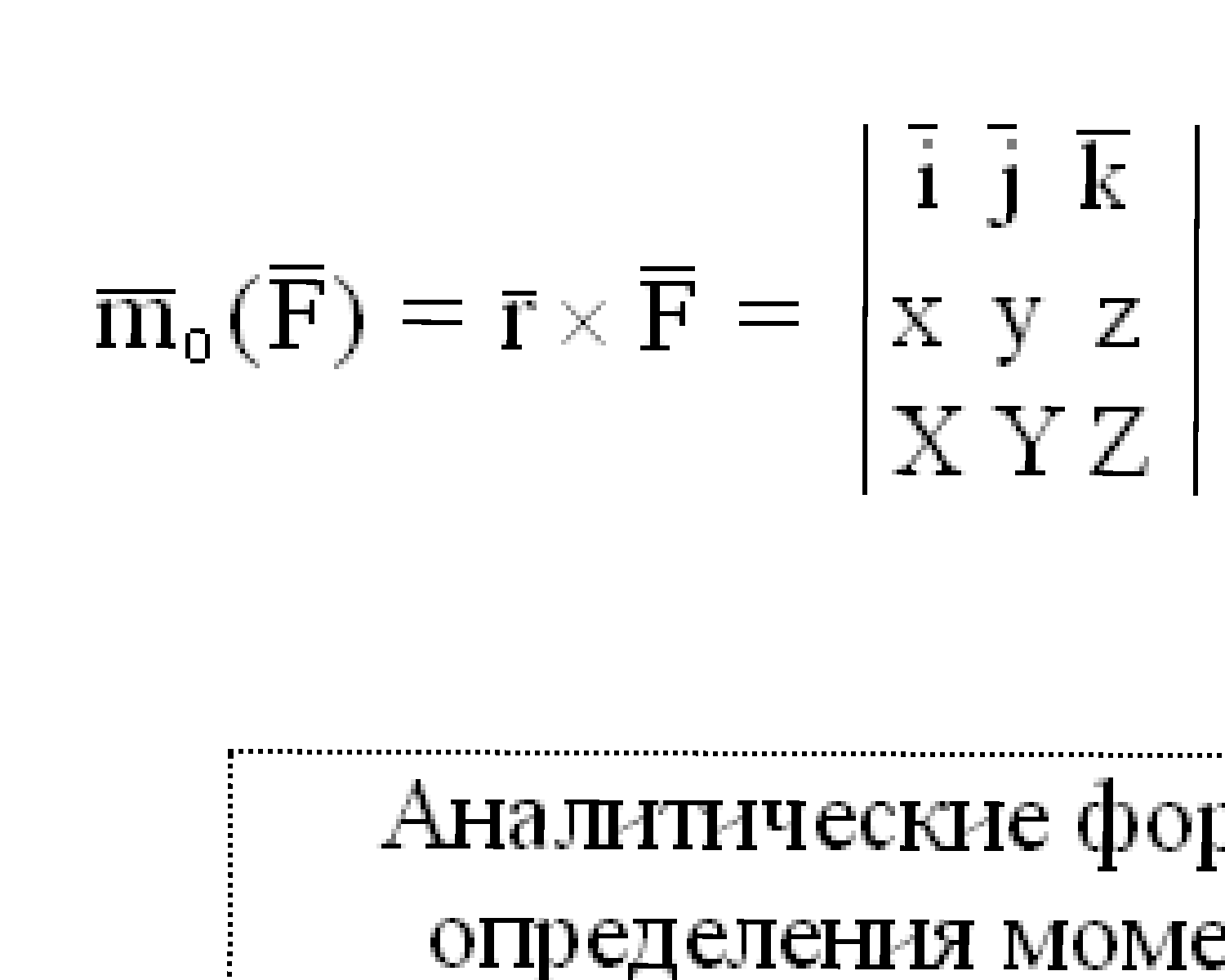
Как определяются проекции вектора-момента силы на оси координат по проекциям силы и ее радиус-вектора на те же оси ?
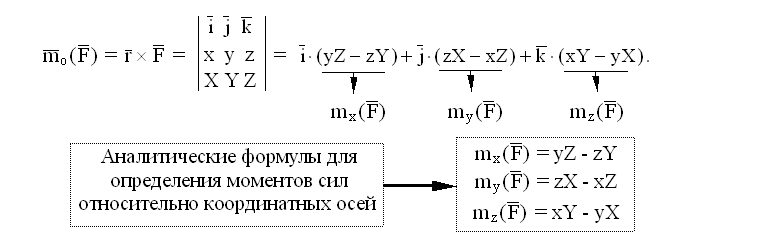
Как определить момент силы относительно начала координат по проекциям силы на оси и координатам точки приложения силы ?
Как определяются величина, направление, точка приложения и линия действия вектора-момента силы относительно заданной точки?
3.8. В каких случаях момент силы относительно точки равен нулю ?
Как определяется знак момента силы при решении задач ?
По часовой минус, против плюс.

3.9. Что понимается под плечом силы при определении ее момента ?
Как определить плечо через радиус-вектор точки приложения силы?
Величину h - кратчайшее расстояние от точки 0 до линии действия силы (см. рисунок) - при определении величины момента силы относительно точки в механике принято называть плечом силы.
h=rsin(r,F)
3.10. Как используется теорема Вариньона о моменте равнодействующей при определении момента силы относительно заданной точки ?
ЕСЛИ СИСТЕМА СИЛ ПРИВОДИТСЯ К РАВНОДЕЙСТВУЮЩЕЙ, ТО МОМЕНТ РАВНОДЕЙСТВУЮЩЕЙ ОТНОСИТЕЛЬНО ЛЮБОЙ ТОЧКИ РАВЕН ГЕОМЕТРИЧЕСКОЙ СУММЕ МОМЕНТОВ СИЛ СИСТЕМЫ ОТНОСИТЕЛЬНО ЭТОЙ ЖЕ ТОЧКИ.
Ma(F)=Ma(Fx)+Ma(Fy)