

Анализ и синтез автоматической системы сопровождения цели при стационарных случайных воздействиях
Цель исследования – практическое освоение методов анализа и синтеза автоматической системы сопровождения цели (АССЦ) при стационарных случайных воздействиях.
Достижение поставленной цели связано с решением следующих задач:
- построение математической модели АССЦ;
- построение математических моделей случайных воздействий;
- построение виртуального моделирующего стенда;
- исследование статистических характеристик сигналов;
- синтез регулятора, оптимального по среднеквадратическому критерию;
- анализ устойчивости и качества регулирования.
Теоретические сведения
Функциональная и расчетная схемы АССЦ даны на рис. 1.

Рис. 1. Функциональная (а) и расчетная (б) схемы
Здесь обозначено: АСС – автоматическая система сопровождения; ОК – оптический координатор; ПН – привод наведения; Н – нагрузка; ЛВЦ – линия визирования цели; ОО – оптическая ось; ИЦ – имитатор цели; φц –координата цели;
φ – угол поворота ОО ОК.
Рассмотрим следящий привод вертикального канала наведения, который реализован на базе электрических машин постоянного тока. Принципиальная схема электропривода представлена на рис.2.

Рис. 2 Принципиальная схема электропривода: СД – сельсин-датчик; СП – сельсин-приемник; ЭУ – электронный усилитель; ЭМУ – электромашинный усилитель; Д – двигатель; Р – редуктор
Математическому описанию функционирования системы с помощью обыкновенных линейных дифференциальных уравнений соответствует структурная схема, представленная на рис. 3.
θвх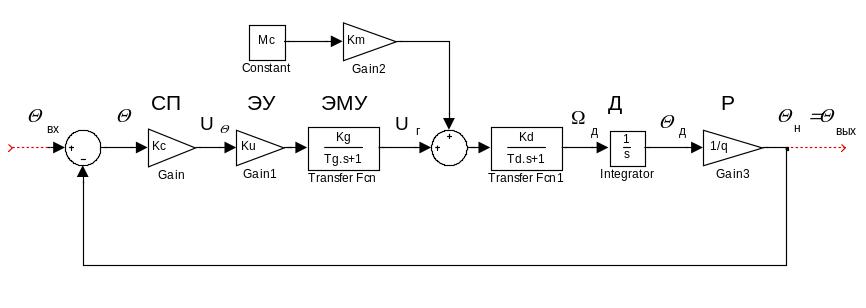
Рис. 3 Структурная схема привода
Здесь обозначено:
![]() - ошибка рассогласования;
- ошибка рассогласования;
![]() ,
,![]() ,
,![]() ,
,![]() - коэффициенты передачи сельсинной
пары, ЭУ, ЭМУ, Д, соответственно;
- коэффициенты передачи сельсинной
пары, ЭУ, ЭМУ, Д, соответственно;
![]() -
передаточное отношение понижающего
редуктора;
-
передаточное отношение понижающего
редуктора;
![]() - постоянные времени ЭМУ и Д, соответственно.
- постоянные времени ЭМУ и Д, соответственно.
Передаточные функции (ПФ), которые необходимы для анализа динамики и точности системы имеют вид:
- ПФ разомкнутой системы
 , (1)
, (1)
где
![]() ;
;
- главная ПФ системы
(при
![]() )
)
 ; (2)
; (2)
- ПФ замкнутой системы по ошибке (при )
 . (3)
. (3)

Рис. 4. Вид реализации типового входного случайного сигнала
ПФ ошибки по скорости будет соответствовать следующая схема моделирования
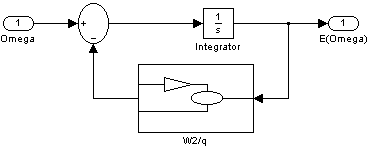
Рис. 5. Схема подсистемы “ПФ ошибки по скорости”.
Здесь подсистеме ”W2/q” соответствует схема моделирования:
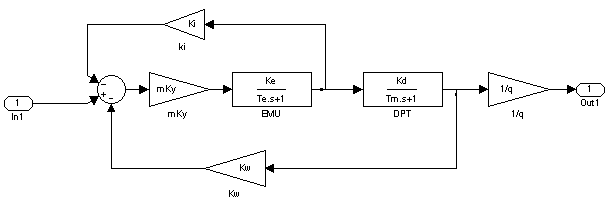
Рис. 6. Схема подсистемы ”W2/q”.
Обозначения: mKy – коэффициент усиления по контуру; Ki – коэффициент усиления по току; Kw – коэффициент усиления по скорости; Ke - коэффициент усиления ЭМУ; Kd – коэффициент усиления двигателя; q – передаточное число редуктора; Te – постоянная времени ЭМУ; Tm - постоянная времени двигателя.
Рассмотрим возмущающее воздействие. В процессе работы АССЦ в сельсинной паре, измеряющей ошибку слежения, возникает случайная помеха F(t). Сигнал F(t) является стационарным случайным процессом типа белого шума с ограниченным спектром. Полагаем, что полезный сигнал и возмущение не коррелированны между собой.
Для вычисления составляющей ошибки от действия помехи следует использовать главную ПФ замкнутой системы. Ей соответствует схема моделирования, представленная на рис. 7.
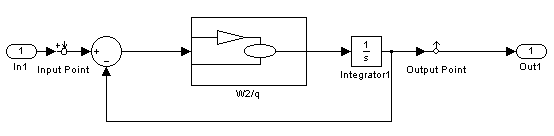
Рис. 7. Схема подсистемы “Главная ПФ”.
Типовые графики зависимостей ошибок от величины коэффициента усиления разомкнутой системы K даны на рис. 8.
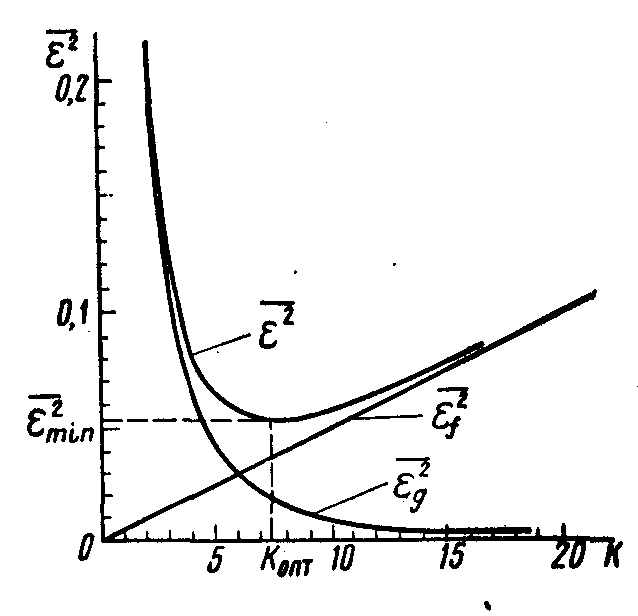
Рис. 8. Виды зависимостей ошибок от величины коэффициента усиления