

Министерство образования и науки РФ
Государственное образовательное учреждение
высшего профессионального образования
«Тульский государственный университет»
Институт высокоточных систем им. В.П. Грязева
Кафедра «Системы автоматического управления»
Отчет
по лабораторному практикуму
дисциплина «Статистическая динамика»
Направление подготовки: 220200 – Автоматизация и управление
Форма обучения: очная
Выполнил ст. гр. 120191
Наумов А.О.
Проверил: доц. каф. САУ
Воробьёв В.В.
Тула 2013г.
Лабораторная работа №1 Анализ системы телеуправления подвижного объекта при стационарных случайных воздействиях
Цель исследования – практическое освоение методов статистического анализа линейной динамической системы при стационарных случайных воздействиях. Достижение поставленной цели связано с решением следующих задач:
- построение математической модели системы;
- построение математических моделей случайных воздействий;
- построение виртуального моделирующего стенда;
- экспериментальное исследование статистических характеристик сигналов, точностных и динамических характеристик системы.
Объектом исследования служит виртуальный моделирующий стенд для статистических испытаний системы телеуправления (СТУ) летательного аппарата. Предмет исследования – статистические характеристики сигналов, а также точностные и динамические характеристики СТУ в условиях стационарных случайных воздействий. Метод исследования – комплексный, основанный на совместном использовании математического описания системы обыкновенными дифференциальными уравнениями, методов статистической динамики, оптимизации, математического (компьютерного) моделирования, статистических испытаний.
Примечание: в данном лабораторном практикуме моделирование, анализ, синтез, оптимизация и испытания систем производятся в среде Matlab с использованием пакетов прикладных программ Simulink, Control System, Signal Processing, Optimization Toolbox.
Функциональная схема СТУ представлена на рис. 1.
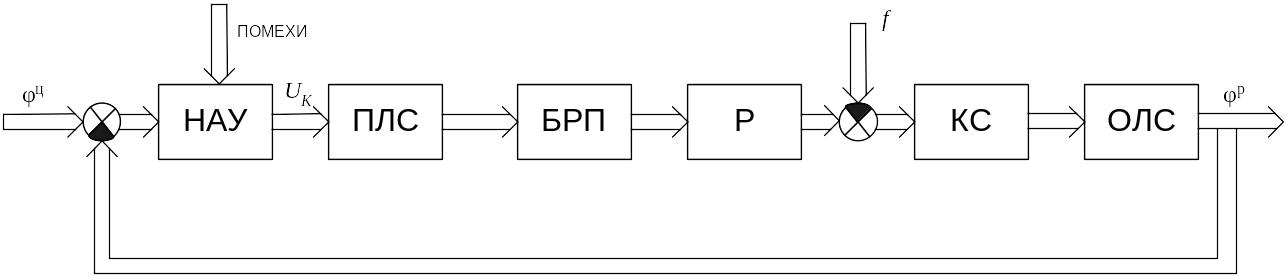

Рис. 1. Функциональная схема: НАУ – наземная аппаратура управления; ПЛС – проводная линия связи; БРП – блок рулевых приводов; Р – ракета; КС – кинематические соотношения; ОЛС – оптическая линия связи; f – вектор кинематических возмущений.
Структурная схема одномерного (плоского) контура управления представлена на рис. 2.

Рис. 2. Структурная схема контура управления
Здесь:
![]() – кинематическое возмущение; N(t)
– помеха,
приведенная ко входу блока аппаратуры
выделения координат (АВК);
Z(t)
– отклонение ракеты в траекторной
системе координат (ошибка наведения).
– кинематическое возмущение; N(t)
– помеха,
приведенная ко входу блока аппаратуры
выделения координат (АВК);
Z(t)
– отклонение ракеты в траекторной
системе координат (ошибка наведения).
Передаточные функции звеньев имеют вид:
WA(p)
=![]() ;Wф(p)
=
;Wф(p)
= ;
Wп(p)
=
;
Wп(p)
=![]() ;
Wр(p)
=
;
Wр(p)
=![]() ,
,
Здесь
![]() – коэффициенты передачи и постоянные
времени звеньев АВК, корректирующего
фильтра, исполнительного привода,
ракеты, соответственно;
– коэффициенты передачи и постоянные
времени звеньев АВК, корректирующего
фильтра, исполнительного привода,
ракеты, соответственно;
![]() – скорость ракеты.
– скорость ракеты.
Схема моделирования системы телеуправления подвижного объекта
при стационарных случайных воздействиях:
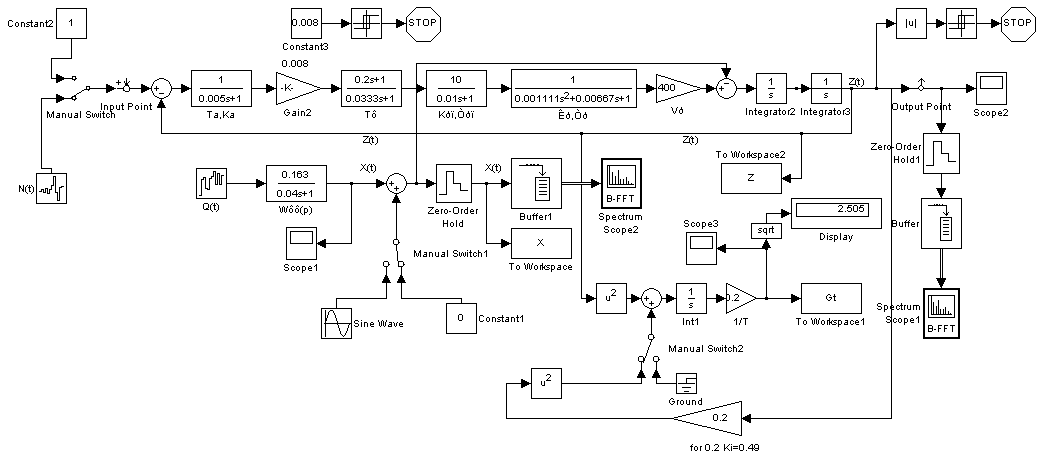
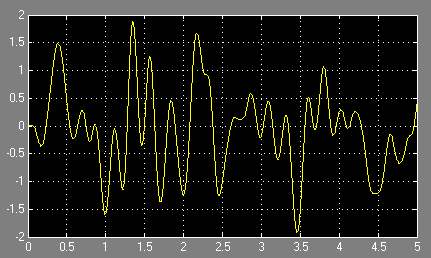
Выходные характеристики:
Отклонение при поправочном коэффициенте Кi=0,008
Среднее квадратичное отклонение =2,5
График корреляционной функции

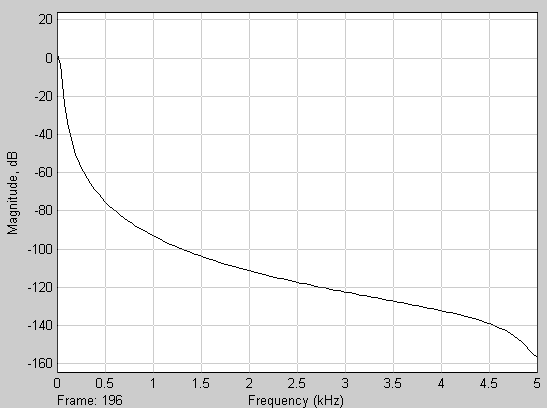
График спектральной плотности
Контрольные вопросы
1. За счёт чего в СТУ возникает ошибка наведения? Каков ее физический смысл? В каком случае сигнал ошибки можно считать стационарным?
2. В чём суть метода формирующего фильтра? Для чего используется этот метод?
3. Какой принцип положен в основу расчёта ошибки в линейных САУ с несколькими входами?
4. Какой критерий используется для оценки точности стохастической системы? Какие подходы имеются к его вычислению в Simulink- схеме? Проанализируйте достоинства и недостатки этих подходов. Каким образом воспроизводится воздействие дельта-функции на расширенную систему?
5. Какие числовые статистические характеристики можно определить по графикам корреляционной функции и спектральной плотности сигнала?
6. Как влияет наличие синусоидальной составляющей во внешнем воздействии на вид реализации воздействия, а также на вид графиков корреляционной функции и спектральной плотности?
7. Какие методы и критерии используются при анализе устойчивости и качества регулирования СТУ? Как они реализуются в системе Matlab?