

Постановка задачи
Используя блок-схему собрать в Matlab/Simulink дельта-модулятор.
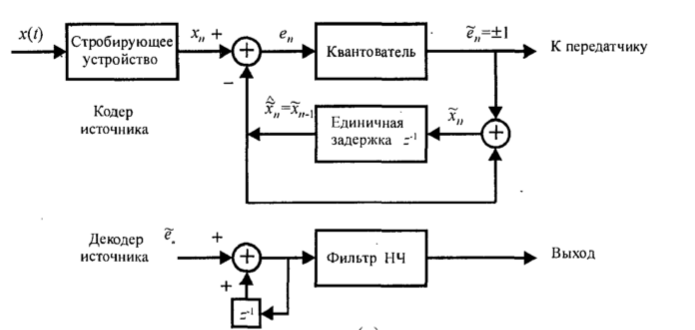
Рисунок 1. Блок-схема системы дельта-модуляции
Параметры:
Длительность информационного символа t = 0.5 мкс
Информационная частота fинф = 2 МГц
Частота Доплера информационная Δfинф =1 Гц
Промежуточная частота fпч = 20МГц
Частота Доплера на промежуточной частоте Δfпч = 200 Гц
Частота несущей fнес = 1.5 ГГц
Краткое описание характеристик моделируемой системы
Дельта-модуляция (ДМ) - один из наиболее эффективных способов преобразования аналогового сигнала в цифровую форму. Дельта-модуляция представляет собой разновидность другого, более известного, способа преобразования - дифференциальной импульсно-кодовой модуляции (ИКМ), в которой число уровней квантования равно двум.
Обычно при кодировании уровня аналогового сигнала требуется передавать несколько битов данных. При использовании дельта-модуляции (ДМ) можно кодировать и передавать только единичное изменение уровня сигнала:
значение «0» — уменьшение уровня сигнала,
значение «1» — увеличение уровня сигнала.
В каждый момент отсчета сигнал сравнивается с предыдущим значением на каждом шаге дискретизации. Если отсчет сигнала превышает по амплитуде предыдущее значение, то последнее нарастает до следующей точки дискретизации, в противном случае оно спадает. Выбирая достаточно малым значение шага дискретизации, можно получить любую заданную точность представления аналогового сигнала.
Учитывая простоту реализации схем дельта-модуляции и особенность восстановления исходного сигнала путем интегрирования и фильтрации, можно не беспокоиться за качество принятого сигнала даже при плохом канале передачи данных. Так как единичные ошибки на слух не воспринимаются и по природе от ошибок избавиться в реальной жизни не возможно, то данный способ преобразования является оправданным, одним из самых надежных и достоверных. А в сочетании с другими методами кодирования и хитростями формирования окончательного цифрового сигнала, дельта-модуляция (ДМ) становится просто одним из эталонов передачи и кодировании данных на сегодняшний день.
Описание модели Matlab
Модель дельта-модулятора состоит из блоков:
1) Bernoulli Binary Generator
2) Unipolar to Bipolar Converter
3) Digital Filter Design
4) Zero-Order Hold
5) Sum1
6) Sign
7) Sum2
8) Delay
9) Sum3
10) Delay1
11) Digital Filter Design1
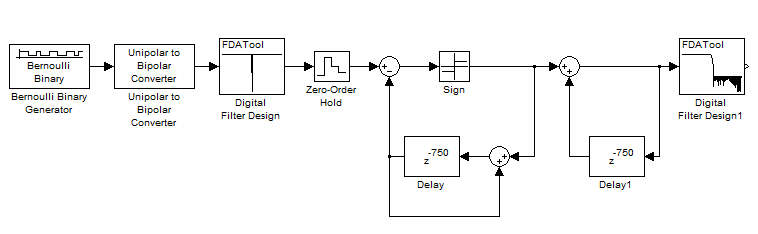
Рисунок 2. Модель системы дельта-модуляции Matlab.
Кодер источника
Входной аналоговый сигнал (Bernoulli Binary Generator, Unipolar to Bipolar Converter) ограничивается по спектру режекторным фильтром (Digital Filter Design). Этот сигнал преобразуется дельта-модулятором в двоичную последовательность импульсов, которая с помощью интегратора, имеющегося в цепи обратной связи, преобразуется обратно в аналоговый сигнал и вычитается из входного сигнала. В результате формируется сигнал ошибки. Последний кодируется одним из двух возможных уровней квантования в зависимости от его полярности. В результате кодирования на выходе квантователя (sign) формируется выходная двоичная последовательность импульсов, которыми представляется знак разности между входным сигналом и сигналом обратной связи.
Дельта-модулятор функционирует как аналого-цифровой преобразователь, который аппроксимирует аналоговый сигнал x(t) линейной ступенчатой функцией. Для обеспечения хорошей аппроксимации сигнал x(t) должен меняться медленно относительно скорости стробирования. Это требует, чтобы его частота дискретизации была бы в несколько раз (не менее 5) больше частоты Найквиста-Котельникова.
Если в некоторой тактовой точке сигнал ошибки e(t)>0, на выходе дельта-модулятора появится положительный импульс. В результате интегрирования этого импульса аппроксимирующее напряжение у(t) увеличивается на одну положительную ступеньку. Это приращение напряжения у(t) далее вычитается из сигнала x(t), и тем самым изменяется абсолютное значение сигнала ошибки. До тех пор, пока e(t)>0, в последующих тактах будет формироваться непрерывная последовательность положительных импульсов. В конце концов, аппроксимирующее напряжение y(t) окажется больше исходного сигнала x(t), и сигнал ошибки e(t) в этом такте изменит знак. Поэтому на выходе модулятора появится отрицательный импульс, что приведёт к уменьшению аппроксимирующего напряжения у=f(t) на один шаг квантования Δ. Следовательно, дельта-модулятор стремится минимизировать сигнал ошибки.
1) Bernoulli Binary Generator
Генерирует случайную двоичную последовательность с распределением Бернулли (для распределения Бернулли вероятность "1" - р, вероятность "0" - (1-р)).
Параметры:
Probability of a zero - вероятность "0" (0.5)
Sample time - шаг модельного времени (1/2000000 c)
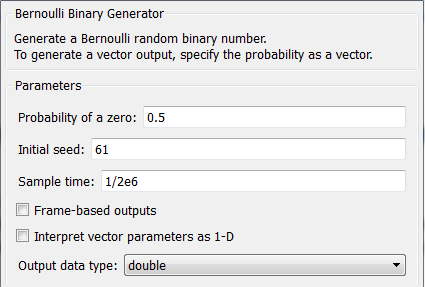
Рисунок 3. Параметры блока Bernoulli Binary Generator
Рисунок 4. Bernoulli Binary Generator.
2) Unipolar to Bipolar Converter
Отображает однополярный входной сигнал в биполярный.
Если входной сигнал состоит из целых чисел от 0 до M-1, где М - параметр М-ary number, то выходной состоит из целых чисел в диапазоне от (М-1) до М-1.
Параметры:
М-ary number - число М (2)
Polarity - полярность (Positive)
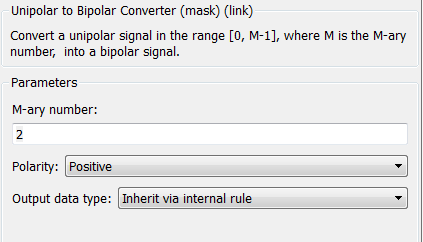
Рисунок 5. Параметры Unipolar to Bipolar Converter.
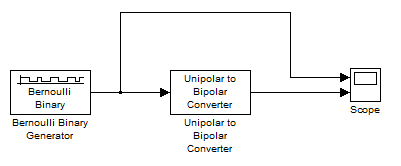
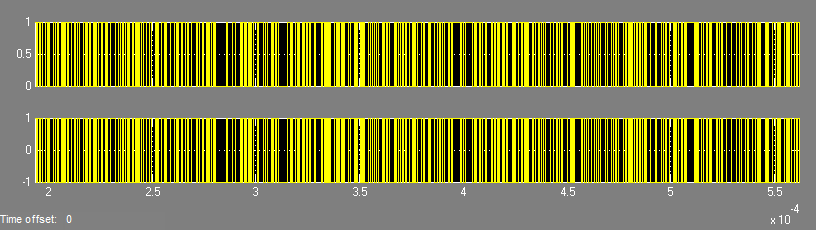
Рисунок 6. Unipolar to Bipolar Converter.
3) Digital Filter Design
Используется для создания режекторного фильтра. С помощью этого фильтра входной сигнал ограничивается по спектру.
Параметры:
Response Type - тип фильтра (Bandstop)
Fpass, Fstop - частоты полосы заграждения
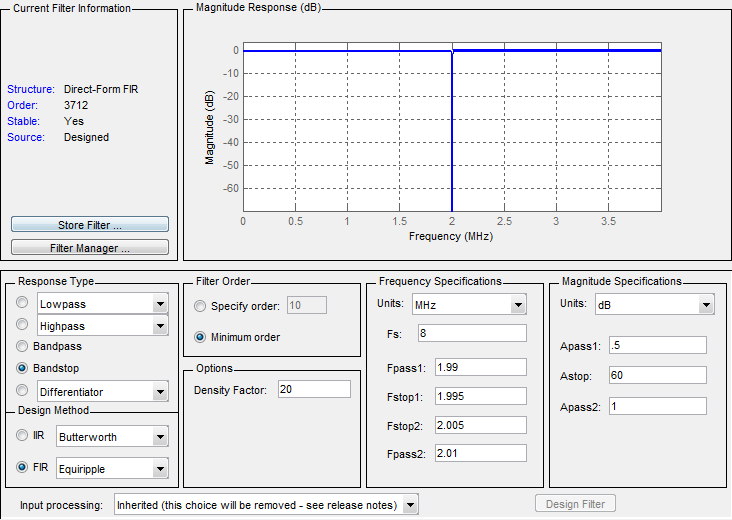
Рисунок 7. Параметры Digital Filter Design.

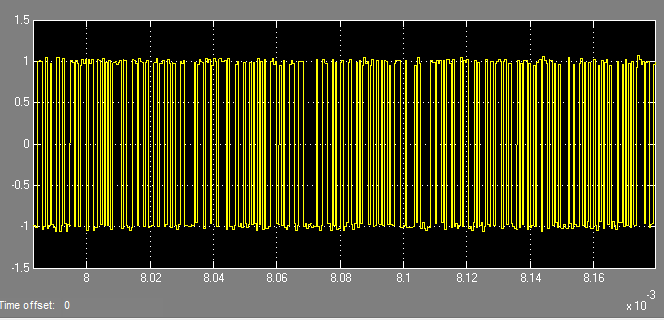
Рисунок 8. Digital Filter Design.
4) Zero-Order Hold
Выполняет функцию стробирующего устройства. Осуществляет дискретизацию входного сигнала по времени. Блок фиксирует значение входного сигнала в начале интервала квантования и поддерживает на выходе это значение до окончания интервала квантования. Затем выходной сигнал изменяется скачком до величины входного сигнала на следующем шаге квантования.
Параметры:
Sample time – Величина шага дискретизации по времени (1/1500000000)
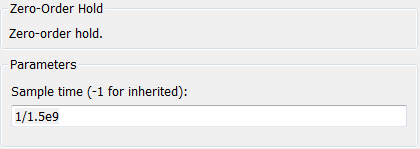
Рисунок 9. Параметры Zero-Order Hold.
5) Sum
Выполняет вычисление суммы текущих значений сигналов.
Парметры:
Icon shape – Форма блока: round – окружность, rectangular – прямоугольник.
List of sign – Список знаков. В списке можно использовать следующие знаки: + (плюс), - (минус) и | (разделитель знаков).
Sample Time
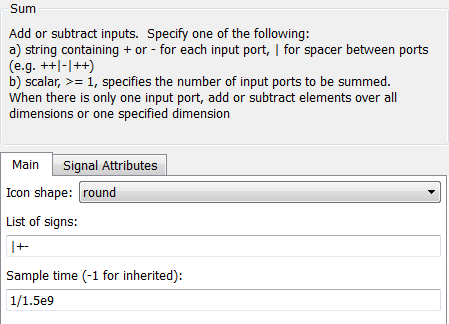
Рисунок 10. Параметры Sum1.

Рисунок 11. Праметры Sum2.
C помощью интегратора осуществляется формирование копии сигнала (аппроксимирующего сигнала). После каждого поступившего на вход интегратора положительного импульса, сигнал на выходе (аппроксимирующий сигнал) увеличивается, а при отрицательном - уменьшается на один шаг квантования. Таким образом, на выходе интегратора формируется ступенчатая функция (аппроксимирующее напряжение).
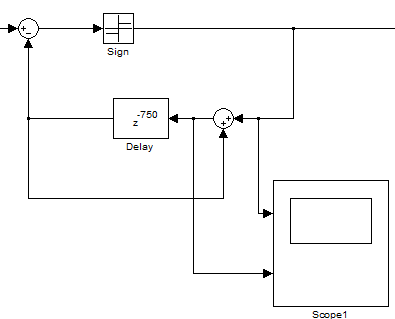
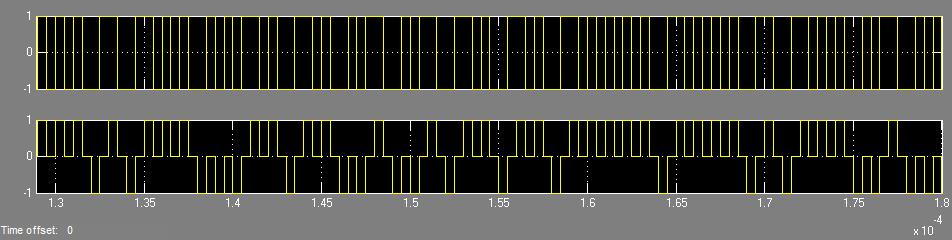
Рисунок 12. Формирование апроксимирующего напряжения.
6) Delay
Выполняет задержку сигнала.
Параметры:
Delay(samples) - задержка (750)
Initial input - начальное значение выходного сигнала (0).
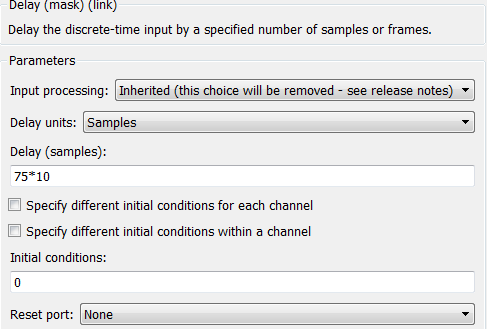
Рисунок 13. Параметры Delay.
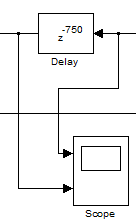
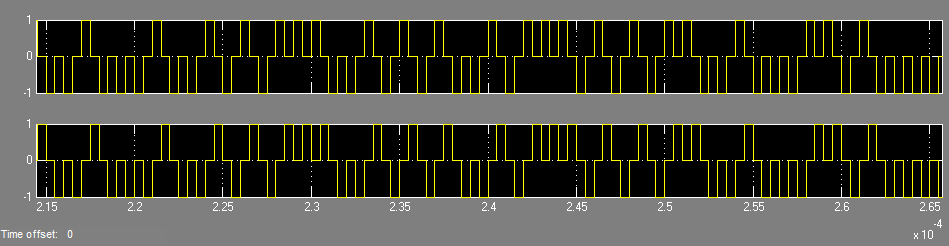
Рисунок 14. Delay.
7) Sign
Определяет знак входного сигнала. Если входной сигнал блока положителен, то выходной сигнал равен 1. Если входной сигнал блока отрицателен, то выходной сигнал равен -1. Если входной сигнал блока равен 0, то выходной сигнал также равен 0.
Формируется выходная двоичная последовательность импульсов, которыми представляется знак разности между входным сигналом и сигналом обратной связи.
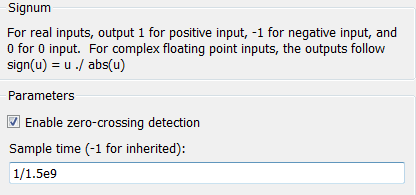
Рисунок 15. Sign.
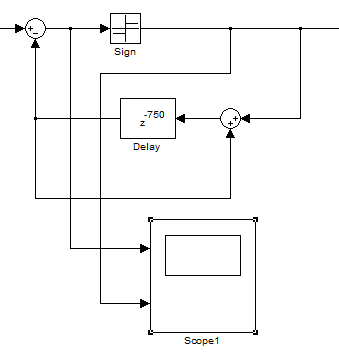
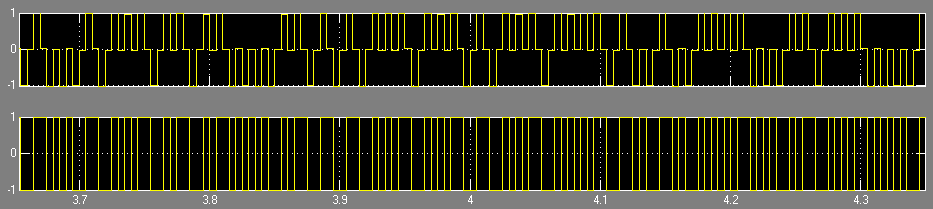
Рисунок 16. Sign.
Декодер источника
Декодер источника при дельта-модуляции состоит из интегратора и полосового фильтра. В результате на приёмной стороне получим аппроксимирующее напряжение y(t). Этот сигнал y(t) тождественен сигналу обратной связи в кодере. Поскольку сигнал y(t) отличается от исходного сигнала x(t) на относительно небольшое значение сигнала ошибки e(t), то можно заключить, что сигнал на выходе интегратора декодера является хорошим воспроизведением исходного аналогового сигнала. Ступенчатая форма сигнала y(t) сглаживается при прохождении этого сигнала через фильтр нижних частот.
1) Sum
Выполняет вычисление суммы текущих значений сигналов.
Парметры:
Icon shape – Форма блока (round)
List of sign – Список знаков (l++)
Sample Time (1/1.5e9).
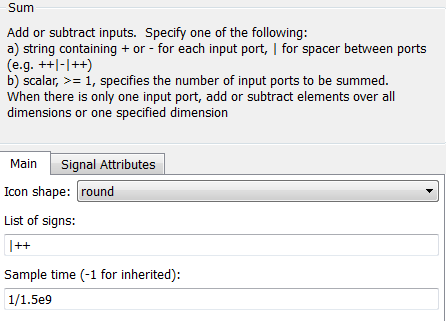
Рисунок 17. Параметры Sum3.
2) Delay
Выполняет задержку сигнала.
Параметры:
Delay(samples) - задержка (750)
Initial input - начальное значение выходного сигнала (0).
Рисунок 18. Парметры Delay1.
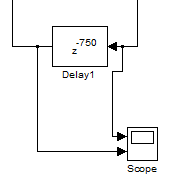
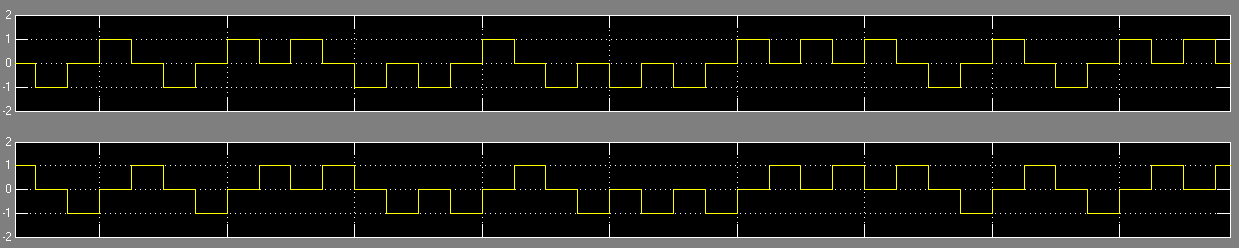
Рисунок 19. Delay1.
3) Digital Filter Design
Используется для создания фильтра нижних частот. При прохождении через этот фильтр ступенчатая форма сигнала y(t) сглаживается.
Параметры:
Response Type - тип фильтра (Lowpass)
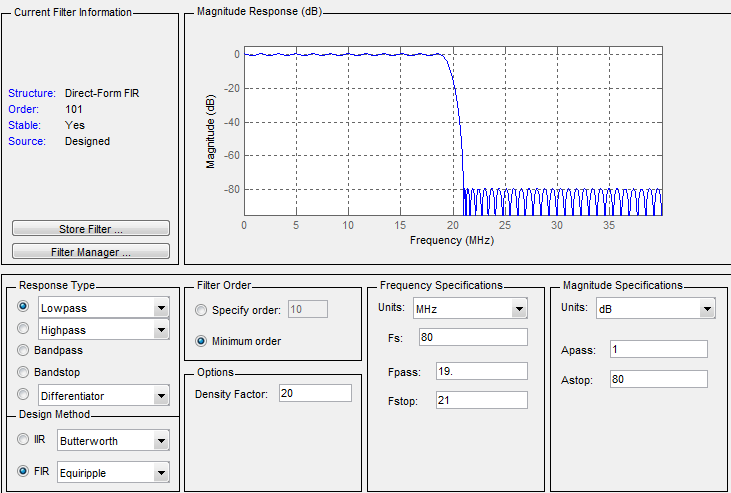
Рисунок 20. Парaметры Digital Filter Design1.
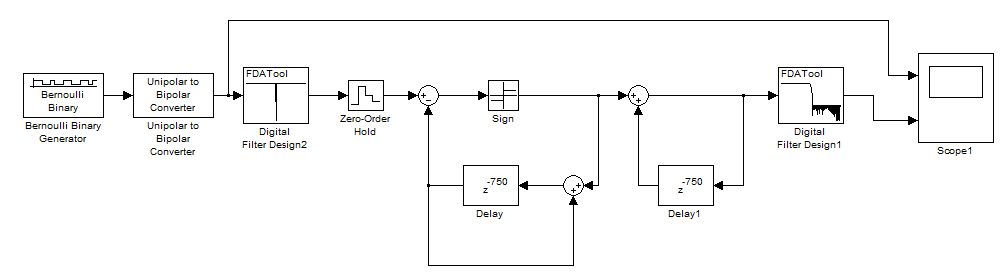

Рисунок 21.