

2.3. Расчет статически неопределимых систем смешанным методом
В смешанном методе неизвестными
параметрами являются силы и перемещения.
Основная система (ОС) смешанного метода
получается из заданной системы путем
отбрасывания связей в одной ее части и
введения дополнительных связей в другой
части. Отброшенные связи заменяются
неизвестными силами
![]() ,
в направлениях дополнительных связей
указываются неизвестные перемещения
,
в направлениях дополнительных связей
указываются неизвестные перемещения
![]() .
Канонические уравнения смешанного
метода строятся исходя из их физического
смысла: отсутствия перемещений в ОС в
направлениях неизвестных сил
и отсутствия реакций дополнительных
связей в направлениях неизвестных
перемещений
.
.
Канонические уравнения смешанного
метода строятся исходя из их физического
смысла: отсутствия перемещений в ОС в
направлениях неизвестных сил
и отсутствия реакций дополнительных
связей в направлениях неизвестных
перемещений
.
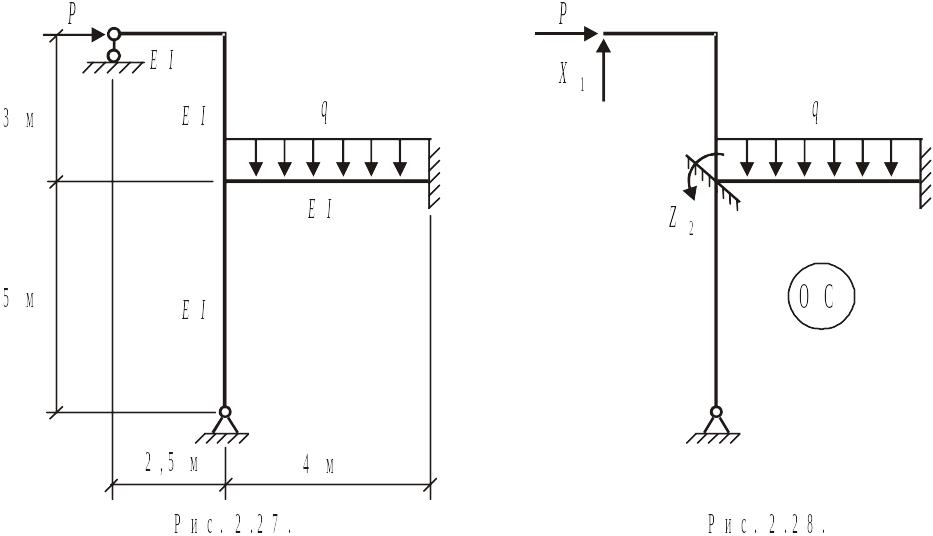
Пример расчета статически неопределимой
рамы (рис.2.27) смешанным методом.
Дано: . Построить эпюры .
1. Выбор ос
Минимальное количество неизвестных
параметров (сил и перемещений) при выборе
ОС получается путем отбрасывания
опорного стержня и замены его неизвестной
силой
![]() ,
и введения дополнительной связи
(заделки), по направлению которой
определяется обобщенное перемещение
(угол поворота узла)
,
и введения дополнительной связи
(заделки), по направлению которой
определяется обобщенное перемещение
(угол поворота узла)
![]() (рис. 2.28). Неизвестные
и
определяются из канонических уравнений
(рис. 2.28). Неизвестные
и
определяются из канонических уравнений
![]()
Штрихами в канонических уравнениях
обозначены смешанные коэффициенты,
связанные между собою равенством
![]() и определяемые, исходя из их физического
смысла:
и определяемые, исходя из их физического
смысла:
![]() - перемещение в ОС в направлении силы
от перемещения
- перемещение в ОС в направлении силы
от перемещения
![]() ;
;
![]() - реакция дополнительной связи в ОС в
направлении перемещения
от силы
- реакция дополнительной связи в ОС в
направлении перемещения
от силы
![]() .
Остальные коэффициенты и свободные
члены уравнений имеют тот же смысл, что
в методе сил (первое уравнение) и в методе
перемещений (второе уравнение).
.
Остальные коэффициенты и свободные
члены уравнений имеют тот же смысл, что
в методе сил (первое уравнение) и в методе
перемещений (второе уравнение).
2. Построение эпюр в ос
Эпюры (рис. 2.29) строятся в ОС соответственно от силы , перемещения и нагрузки. Последние две эпюры строятся по справочным данным для типовых элементов метода перемещений (табл. 2.1).
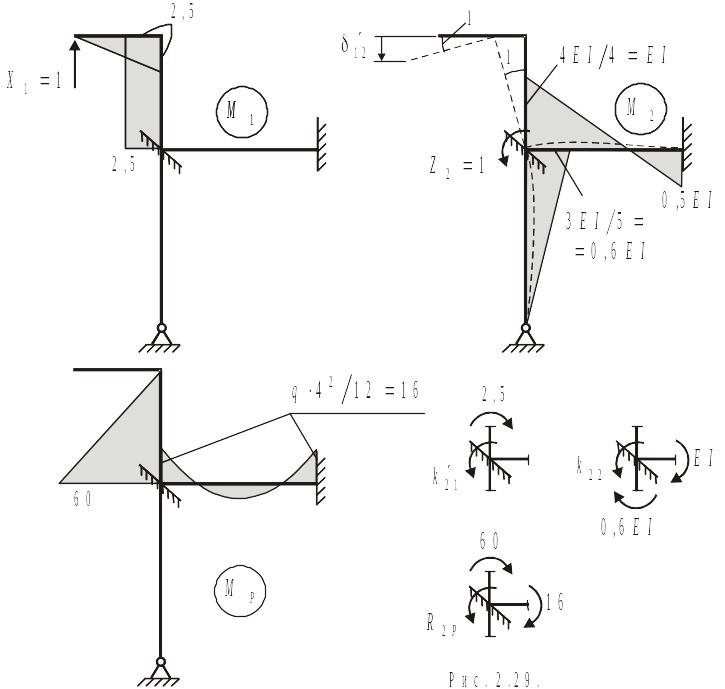
3. Определение коэффициентов при неизвестных и свободных
членов канонических уравнений
Значения определяются по формуле Мора. Интегралы Мора на каждом участке находятся по справочным формулам перемножения эпюр или по правилу Верещагина.
![]()
![]()
Коэффициент
находится из геометрических соображений
(см. эпюру
![]() ):
):
![]() .
Значения
.
Значения
![]() находятся из равновесия внешних и
внутренних моментов в узле, содержащем
дополнительную связь (рис.2.29):
находятся из равновесия внешних и
внутренних моментов в узле, содержащем
дополнительную связь (рис.2.29):
![]() .
.
Подставляя найденные значения в
канонические уравнения и решая последние,
получаем:
![]() .
.
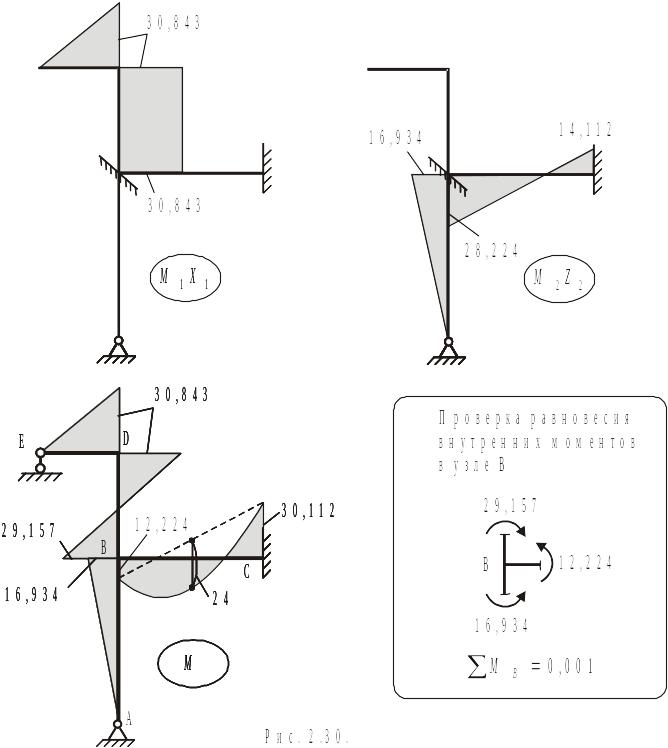
4. Построение эпюр в заданной системе
Эпюра
(рис. 2.30) строится по принципу суперпозиции:
![]()
![]() (эпюры
(эпюры
![]() строятся отдельно).
строятся отдельно).
Находим поперечные силы на участках конструкции.
Участок AB:
![]()
Участок BD:
![]()
Участок ED:
![]()
Участок BC:
![]()
![]()
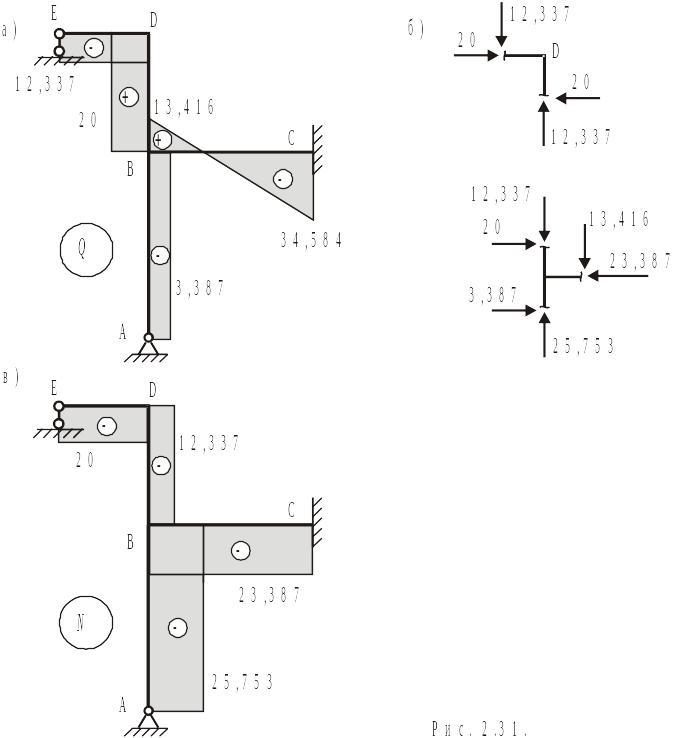
По полученным результатам строим эпюру (рис. 2.31а). Продольные силы (и их действительные направления) определяются из равновесия узлов конструкции (рис. 2.31б). Направления данных сил к узлам конструкции означает сжатие соответствующих участков конструкции. Эпюра показана на рис. 2.31в.