

2.2.8. Трансформаторные (взаимноиндуктивные) преобразователи
Преобразователи, преобразующие перемещение в изменение взаимоноиндуктивности, называются трансформаторными.
Трансформаторный преобразователь изображен на рис. 22.
Обмотка W1 питается от источника переменного тока. Если магнитодвижущую силу F, т.е. ток I, поддерживать постоянным, то магнитный поток и индуктированная во вторичной обмотке ЭДС будут функциями длины воздушного зазора , связанной со значением силы Р
![]() . (16)
. (16)
Трансформаторные преобразователи, как и индуктивные, выполняют по дифференциальной схеме.
2.2.9. Магнитоупругие преобразователи
Принцип действия магнитоупругих преобразователей основан на изменении магнитной проницаемости ферромагнитных тел в зависимости от возникающих в них механических напряжений (магнитоупругиие эффект), обусловленных воздействием на ферромагнитные тела механических сил Р (растягивающих, сжимающих, изгибающих, скручивающих). Таким образом, в магнитоупругом преобразователе имеется цепь следующих преобразователей:
![]() .
.
Типы магнитоупругих преобразователей можно разбить на две основные группы. К первой группе относятся преобразователи, в которых используются изменения магнитной проницаемости чувствительного элемента в одном направлении (рис. 23). Ко второй группе относятся преобразователи, в которых используется изменение магнитной проницаемости одновременно в двух взаимно перпендикулярных направлениях. Преобразователи обеих групп могут работать как переменные индуктивные сопротивления, величина которых определяется приложенным к сердечнику механическим усилием, и как трансформаторные преобразователи с переменной взаимоиндуктивностью между обмотками.
2.2.10. Механоэлектрические преобразователи
Принципиальная схема механоэлектрического преобразователя типа МП-П приведена на рис. 24.
Рис.
24. Схема
механоэлектрического
преобразователя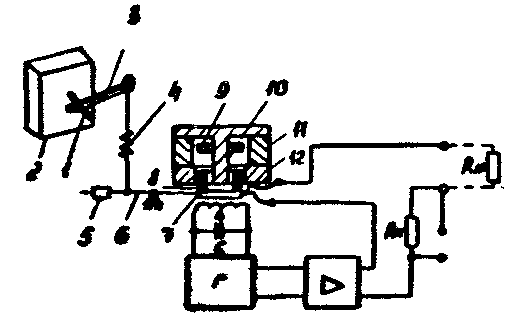
При перемещении коромысла, а вместе с тем и флажка изменяется индуктивность катушки, следовательно, и параметры контура L - С, что приводит к изменению режима работы генератора постоянного напряжения на нагрузочном сопротивлении генератора. Выходной сигнал генератора усиливается усилителем постоянного тока.
В выходную цепь усилителя постоянного тока включены обмотка рамки обратной связи, калиброванный резистор Rк и резистор внешней нагрузки Rн (вторичных приборов и линий связи). Обмотка рамки находится в кольцевом зазоре, образованном сердечником 10 и полюсной накладкой 12. Между основанием сердечника и полюсной накладкой расположен постоянный магнит 11, имеющий форму усеченного конуса.
При протекании тока через обмотку рамки обратной связи она будет втягиваться в зазор, создавая усилие qос и, следовательно, может противодействовать моменту, создаваемому усилием цилиндрической пружины при ее растяжении. Изменение выходного тока усилителя будет происходить до тех пор, пока эти моменты не уравняются.
Внутри постоянного магнита предусмотрен шунт 9, который можно перемещать вдоль сердечника 10 с помощью специальных винтов, изменяя индукцию в зазоре, а вместе с тем и диапазон выходного сигнала преобразователя.
Подвижная система преобразователя должна находиться в положении безразличного равновесия, что достигается балансировкой с помощью груза 5. Подвижная система преобразователя электрически изолирована с помощью прокладок от металлических его частей для устранения гальванической связи с землей.