

Модули агрегатов объекта управления
В рассматриваемом примере объект управления представлен двумя
агрегатами, совместно выполняющими производственную программу. Управление агрегатом А1 осуществляется через исполнительные механизмы четырьмя управляющими входами. Технологический процесс агрегата контролируют 6 датчиков (6 выходов). Агрегат А2 имеет 5 управляющих входов и 8 выходов с датчиков. Оба агрегата запускаются одновременно и все время работают совместно. На рис. 1.4 изображены имитаторы агрегатов А1 и А2 в графовом представлении.
В А1 вход с d1 стабилизирует параметр, измеряемый датчиками d6 и d7. Вход d2 обеспечивает динамику изменения некоторого параметра по заданному закону (траектории). Контроль этого параметра осуществляется датчиками d8 и d9. Через d3 выполняется подстройка параметров работы оборудования. Для этой цели помимо данных о технологическом процессе используется датчик d5. Через вход d4 поступает управляющее воздействие, которое оптимизирует работу объекта в целом. При этом используется датчик d10 и данные о протекании технологического процесса.
Рис. 1.4. Графовое изображение имитаторов агрегатов
В А2 вход d2 эквивалентен входу d3 в А1, входы d1 и d3 соответствуют входу d4 в А1, а вход d4 используется для автономного управления агрегата А2. Датчик d5 в А2 дает показания, аналогичные датчику d10 в А1. Данные с датчиков d6, d7, d8 используются при автономном управлении агрегата А2, а датчик d9 соответствует d5 в А1. Выходы d11, d12 в А2 дают сигнал аварийного состояния агрегата, а через вход d10 поступает управляющее воздействие по переводу его в штатный режим. По выходу d13 формируется сигнал запуска таймера.
Прикладные функции примера системы. Вторую часть исходных данных составляет описание совокупности ПФ. Ранее уже отмечалось, что формальное определение ПФ отсутствует и в этом нет особой необходимости, т.к в качестве динамических объектов программной нагрузки выступают вычислительные процессы, формальное определение которых является более важным и будет рассмотрено в следующей главе.
Для более однозначного восприятия в последующем будем считать, что ПФ отражает полный цикл операций по сбору данных о состоянии объекта управления, обработке этих данных и своевременному получению управляющих воздействий, поступающих на ИМ агрегатов. В соответствии с этим не все ПФ, приведенные в разделе 1.1, отвечают этому определению и могут рассматриваться как отдельные операции. Если объединение таких операций образует полный цикл управления от информации с датчиков до получения управляющих воздействий, то будем считать, что имеет место ПФ.
Совокупность ПФ для рассматриваемого примера сформирована исходя из принятого выше определения и включает 6 функций. При этом каждая из них состоит из одной или нескольких ПФ, приведенных в разделе 1.1. Совокупность представляют следующие функции:
ПФ1 − (группа 3е) стабилизация входных переменных;
ПФ2 − (группа 4а) анализ ситуации в технологическом процессе, (группа 3в) требуемое изменение выходных переменных;
ПФ3 − (группа 1б) сбор измерительной технологической информации, поступающей циклически, (группа 2г) преобразование данных к удобному виду, (группа 3б) вычисление управляющего воздействия;
ПФ4 − (группа 3е) координированное оптимальное управление;
ПФ5 − (группа 4д) оптимизация показателей функционирования агрегатов;
ПФ6 − (группа 4б) принятие решений в аварийных ситуациях.
Каждую из приведенных ПФ будем воспринимать одним модулем и согласно изложенному выше функциональному назначению входов и выходов агрегатов А1 и А2 представим связи модулей ПФ с входами и выходами агрегатов в виде таблицы 1.4.
Таблица 1.4. Входы и выходы модулей ПФ
Модули ПФ |
ПФ1 |
ПФ2 |
ПФ3 |
ПФ4 |
ПФ5 |
ПФ6 |
Входы |
|
|
|
|
|
|
Выходы |
|
|
|
|
|
|
В табл.1.4 верхний индекс у входов и выходов модулей ПФ обозначает принадлежность агрегату А1 или А2, а нижний индекс указывает порядковый номер позиции в имитаторе агрегата (рис. 1.4).
Модульная структура на уровне ПФ. Используя данные табл. 1.4 и рис. 1.4, можно построить укрупненный вариант модульной структуры, содержащей 8 модулей − 2 модуля имитатора агрегатов и 6 модулей имитаторов ПФ. Такая структура приведена на рис. 1.5.
Рис. 1.5. Модульная структура на уровне модулей ПФ
Нумерация позиций на рис. 1.5 соответствует нумерации входов и выходов агрегатов, принятой на рис. 1.4. В модульной структуре на рис. 1.5 показаны связи между модулями агрегатов и модулями ПФ. В ней не учтены связи между модулями ПФ. Такие связи могут быть двух типов. В первом случае ПФ формирует данные, которые предназначены для модулей других ПФ. Во втором случае данные формируются и используются в одной ПФ и одновременно с этим являются входами для модулей других ПФ. Необходимость в таких связях возникает при разработке алгоритмов функционирования ПФ и в техническом задании не всегда может быть выявлена. Поэтому будем считать, что все связи между модулями ПФ устанавливаются в ходе разработки модульной структуры ПФ.
Разработка модульной структуры ПФ. Приступая к разработке модульной структуры для отдельной ПФ, будем придерживаться основного правила декомпозиции алгоритма ПФ на модули. Это правило сводится к следующему. Если модуль ПФi формирует данные для использования в другой ПФj и делает это не в конце работы, а раньше, то декомпозиция такого модуля ПФi желательна. И в другом случае, если модуль ПФj использует данные, полученные в другой ПФi, не с начала работы, а позже, то декомпозиция модуля ПФj желательна. Применение правила декомпозиции показано на рис 1.6.
Рис. 1.6. Декомпозиция модуля ПФ
Если правила
декомпозиции а) и б) соблюдаются
одновременно для обоих модулей ПФi
и ПФj,
то декомпозиция производится и в том и
в другом модуле. На рис.1.6 величина
![]() соответствует времени передачи данных
в сети между ПФi
и ПФj,
если они выполняются на разных станциях.
Отрезки на временных осях отражают
последовательное во времени выполнение
алгоритмов соответствующих ПФ. Отрезки
соответствует времени передачи данных
в сети между ПФi
и ПФj,
если они выполняются на разных станциях.
Отрезки на временных осях отражают
последовательное во времени выполнение
алгоритмов соответствующих ПФ. Отрезки
![]() и
и
![]() (рис.
1.6,а) соответствуют делению алгоритма
ПФi
на 2 части (2 модуля) − до получения
данного для использования в ПФj
и после получения этого данного. Справа
на рис. 1.6 показаны варианты модульных
структур, получаемые после декомпозиции.
(рис.
1.6,а) соответствуют делению алгоритма
ПФi
на 2 части (2 модуля) − до получения
данного для использования в ПФj
и после получения этого данного. Справа
на рис. 1.6 показаны варианты модульных
структур, получаемые после декомпозиции.
Рассмотренное выше правило не является единственным основанием для декомпозиции. Существуют и другие основания, например, стремление ограничить время выполнения модуля, т.е крупный модуль разбивается на более мелкие (модули «короткого действия»), распараллелить их работу и другие основания. Выполняя разработку модульной структуры ПФ, изложенное выше правило приходится использовать практически всегда, тем более, что его применение является вынужденным, т.к это затрагивает вопрос адекватности представления модели программной нагрузки в виде модульной структуры. Используя такую декомпозицию, мы по существу добиваемся, получения такого состояния модульной структуры, в которой все глобальные переменные (данные) представляются в явном виде в форме позиций. При этом доступ к данным в общем случае разрешается сразу после их получения (не в конце работы модуля), а поступление данных может происходить непосредственно к моменту начала их использования (не к моменту запуска модуля).
Учитывая, что разработка алгоритмов ПФ здесь не рассматривается, потребность в связях между ПФ устанавливается произвольно, придерживаясь сведений по содержанию и составу ПФ, входам и выходам, представленным в табл. 1.4, а также предложенной версии взаимодействия ПФ. На рис. 1.7 приведены модульные структуры ПФ для рассматриваемого примера системы, разработанные с учетом изложенных выше положений.
В модульных структурах ПФ (рис. 1.7) входные и выходные позиции, связанные с модулями агрегатов, выделены жирно и имеют номера с индексами. При этом номера позиций сохраняют соответствующие номера входов и выходов (см. табл. 1.4), а индексы также сохранены и указывают на связь с модулями агрегатов А1 и А2. Например, входы в ПФ1 соответствуют позициям с номерами 61, 71. Все остальные позиции получены в результате декомпозиции модулей ПФ (рис. 1.5) и установления связей между ними. Такие позиции нумеруются последовательно по мере их возникновения в ходе разработки модульных структур. Из рис. 1.7 следует, что таких позиций получилось 15. Ниже дадим некоторые комментарии к разработке модульных структур ПФ.
Модульная структура
для ПФ1
получена в результате декомпозиции
алгоритма функции 3а на 2 модуля. Это
сделано исходя из предположения, что
вход
![]() поступает на модуль m2,
а не на модуль m1,
т.е не на начало модуля ПФ1.
Если бы позиция
была входом в модуль m1,
то декомпозиция не имела бы смысла.
Предполагается также, что модуль m2
формирует состояние позиции d2
в конце работы, а не где-то в средине,
иначе возникло бы основание и для
разбиения модуля m2
на два модуля.
поступает на модуль m2,
а не на модуль m1,
т.е не на начало модуля ПФ1.
Если бы позиция
была входом в модуль m1,
то декомпозиция не имела бы смысла.
Предполагается также, что модуль m2
формирует состояние позиции d2
в конце работы, а не где-то в средине,
иначе возникло бы основание и для
разбиения модуля m2
на два модуля.
Разработка модульной структуры ПФ2 выполнена исходя из предположения, что в своей работе она последовательно использует позиции d1 и d2, полученные в ПФ1, и формирует позицию d10 для использования в других ПФ. Заметим, что нумерация позиций d1 и d2, принятая в ПФ1, сохраняется при нумерации позиций в модульной структуре ПФ2. Это дает возможность при построении общей модульной структуры модели системы совмещать позиции с одинаковыми номерами.
В модульной структуре ПФ3 следует обратить внимание на то, что модули m2 и m3 в соответствии с принятым правилом декомпозиции могли быть представлены одним модулем. Здесь мы руководствовались тем, что модули m1 и m2 реализуют разные функции 2г и 3б и их объединение ухудшит функциональное восприятие модели. Кроме того, в случае такого объединения у позиции d5 сокращается время на передачу данных при условии, что модуль функции 1б выполняется на одной станции, а модуль функций 2г и 3б на другой.
Рис. 1.7. Модульные структуры ПФ
Построение модульных структур для ПФ4 и ПФ6 осуществляется по схеме аналогичной ПФ1. Учитывая, что функция 3е призвана осуществлять координацию совместной работы агрегатов А1 и А2, она использует данные о технологических процессах, содержащиеся в ПФ1 (позиция d1) и в ПФ3 (позиции d5 и d6). Это предположение и предопределило декомпозицию функции 3е. Декомпозиция функции 4б в ПФ6 позволяет использовать более «свежие» состояния позиции d6 при принятии решения о переводе агрегата А2 в штатный режим.
Функция 4д,
реализуемая в ПФ5,
использует специально подготовленные
для нее данные d10
в ПФ2
и d8
в ПФ3
и на основе показаний датчиков
![]() и
и
![]() о состоянии агрегатов А1
и А2
принимает решение о корректировке
режимов их работы. Запуск ПФ5
осуществляется циклически по таймеру
m1,
а данные по корректировке (выходы
о состоянии агрегатов А1
и А2
принимает решение о корректировке
режимов их работы. Запуск ПФ5
осуществляется циклически по таймеру
m1,
а данные по корректировке (выходы
![]() и
и
![]() )
формируются модулем m4
не в каждом цикле, а в случае, если
синхронизатор m3
сформирует в d14
определенную величину. Эта ситуация в
данном случае стала основанием для
выделения модулей m3
и m4.
Если у разработчика проекта нет желания
представлять динамику работы ПФ5
в такой более наглядной форме, то модули
m3
и m4
могут быть представлены одним модулем.
)
формируются модулем m4
не в каждом цикле, а в случае, если
синхронизатор m3
сформирует в d14
определенную величину. Эта ситуация в
данном случае стала основанием для
выделения модулей m3
и m4.
Если у разработчика проекта нет желания
представлять динамику работы ПФ5
в такой более наглядной форме, то модули
m3
и m4
могут быть представлены одним модулем.
На примере ПФ5 мы столкнулись с новым основанием для вынужденной декомпозиции, связанной с динамикой работы ПФ. Условия динамики будут рассмотрены при анализе модели в следующей главе. Здесь лишь кратко познакомимся с влиянием условий поступления входов и обновления выходов на декомпозицию на примере модуля ПФ (рис. 1.8).
Рис. 1.8. Согласование условий поступления входов и обновления выходов путем декомпозиции
Если нам заранее
известно (указанно в задании или сделано
предположение), что в модуле ПФ условия
поступления входа d1
и выхода d2
не согласуются, то такой модуль должен
быть разбит на 2 модуля, как это показано
на рис. 1.8, а. Вариант с конкретными
значениями параметров условий поступления
и обновления показан на рис.1.8, б. Здесь
позиция d3
как выход модуля m1
обновляется по правилу Ц-присоединения
с k=3,
а как вход в m2
поступает циклически с
![]() .
.
В целом, разрабатывая модульную структуру модели системы, следует понимать, что дополнительные основания для декомпозиции модулей могут возникать и после ее построения. Поэтому модульные структуры ПФ, приведенные на рис. 1.7, следует рассматривать в качестве исходных вариантов.
Модульная структура модели системы на языке SML. Для получения общей модульной структуры модели системы необходимо объединить модульные структуры ПФ и модули агрегатов А1 и А2. Объединение также как и построение модульных структур отдельных ПФ осуществляется с помощью SML-редактора. Вариант визуального представления полученной модульной структуры в форме ГПД показан на рис. 1.9. Модель не включает ПФ6, т.к данная функция отрабатывает аварийную ситуацию на агрегате А2, вероятность появления которой мала и поэтому на этапе анализа может не учитываться.
ГПД модели представлен на рис. 1.9 в соответствии с правилами визуального уровня языка SML. Основными компонентами ГПД являются модули, позиции и дуги. Модули независимо от принадлежности к группе имеют сквозную нумерацию. Номера модулей могут сопровождаться указанием принадлежности к группам как это сделано на рис. 1.9.

Рис. 1.9. Модульная структура модели системы в форме ГПД
Позиции, также как и модули, независимо от принадлежности к группам имеют свою сквозную нумерацию. Из рис.1.9 следует, что позиции в ГПД имеют различные изображения в виде определенных дополнений к кружку. Эти дополнения в языке SML стандартизованы и введены для улучшения визуального восприятия ГПД. Перечень видов изображений позиций с указанием их групп и смыслового содержания дополнительных признаков приведено в табл. 1.5.
Перечисленные в табл. 1.5 признаки содержатся в описателях позиций (табл. 1.2). При построении модульной структуры SML-редактор все позиции изображает без дополнительных признаков как это показано на рис. 1.7. При формировании описателей позиций дополнительные признаки становятся известны и после этого автоматически изменяются изображения позиций в ГПД.
Для улучшения визуального восприятия в ГПД допускаются разрывы дуг. На рис. 1.10 показаны правила изображения разрыва дуг (di, mj) и (mj, di,). Разрывы дуг по этим правилам можно видеть на рис. 1.9, например для дуги (d2, m8).
Таблица 1.5. Изображение позиций
-
№
Вид
Смысловое содержание дополнительного признака
Группа
1

Данные без признаков
D
2

Совокупность присоединенных состояний данных
D
3

Сигнальные данные
P
4

Выделенное показание таймера
K
5

Значение счетчика
К
6

Управляющее воздействие
U
7

Разделяемый ресурс
R
8

Потребляемый ресурс
Q
9

Общая область памяти
Z
10

Буфер
B
11

Начальные условия
D
12

Сигнал запуска агрегатов и таймеров
P
13

Запрос оператора
Д
14

Данные из другой системы
Д
15

Данные для другой системы
Д
16

Начальный запуск и останов агрегатов (позиция без номера)
Д
Построенная таким образом модульная структура в SML-технологии рассматривается как начальное состояние модели системы. Описатели модулей (табл. 1.1) и позиций (табл. 1.2) на данном этапе заполняются настолько насколько это возможно. Последующее доопределение модели системы, заполнение описателей модулей и позиций и формирование на этой основе функций настройки (табл. 1.3) выполняется на этапе аналитических методов разработки и оптимизации модели при выполнении других блоков SML-технологии.
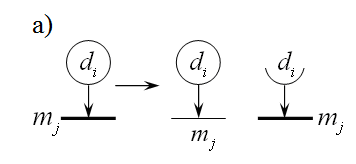
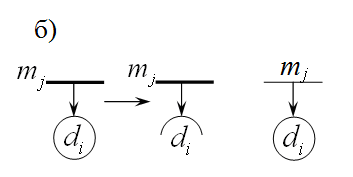
Рис. 1.10. Изображение разрыва дуг
Выводы по главе 1. Выполняя разработку модульной структуры модели системы, разработчик проекта на основе исходных сведений об объекте управления и совокупности ПФ должен сформулировать и представить общую концепцию функционирования разрабатываемой модели системы (аналог технического задания). Далее на основе принятой концепции, следуя изложенной выше методике, разрабатывается модульная структура модели системы. Выделим основные действия, которые необходимо выполнить при разработке модульной структуры.
Уточнить назначения входов и выходов каждого агрегата, связывая их с назначением ПФ по формированию управляющих воздействий (см. рис. 1.4).
Сформировать входы и выходы ПФ, связывая их с входами и выходами агрегатов (см. табл. 1.4).
Построить модульную структуру модели системы на уровне модулей ПФ (см. рис.1.5) и на ней предложить и пояснить необходимость введения ряда связей между модулями ПФ.
Разработать модульные структуры для каждой ПФ, руководствуясь правилами декомпозиции модулей ПФ с учетом связей между ними (см. рис. 1.7).
Построить объединенную модульную структуру модели системы (см. рис. 1.9).
Модульная структура в форме ГПД, представленная на рис. 1.9, может быть преобразована в упрощённый вариант активной модели и выполнена на ВММ. Активная модель в данном случае отражает функциональный уровень моделирования, когда основное внимание уделяется проверке правильности выполнения ПФ и взаимодействия их между собой. В таком варианте активная модель именуется ГПД-программой. При выполнении ГПД-программы на ВММ основным условием запуска модуля является наличие у него входных данных.
Функциональный уровень моделирования используется также для накопления статистики по продолжительностям выполнения модулей. При этом уточняются оценки по объёмам данных, выделяются основания для декомпозиции модулей и формирования процессов. Полученные результаты используются в последующем при построении и анализе динамической модели СРВ.