

Структурный анализ и синтез механизмов
Под структурным анализом понимается определение количества звеньев и кинематических пар, классификация кинематических пар, определение степени подвижности механизмов и установление класса и порядка механизмов.
Структурным синтезом механизма называется – проектирование структурной схемы механизма которая состоит из:
Неподвижного звена;
Подвижных звеньев;
Кинематических пар.
Наиболее удобным методом нахождения структурной схемы считается метод присоединения структурных групп Ассура либо к ведущему звену либо к механизму.
Ассур первым фундаментально исследовал структурную схему плоских стержневых механизмов.
Группа Ассура – это кинематическая цепь, которая в случае ее присоединения элементами внешних пар к стойке получает нулевую степень подвижности, т.е. образует ферму. Структурная формула группы Ассура получается из формулы Чебышева:
W=3n-
= 3/2n,
где n число подвижных звеньев. Отсюда следует, что число кинематических пар 5-го класса в группе обязательно целое число. Этот принцип проиллюстрирован рисунком 2.12. На рисунке показан пример присоединения двух поводковых пар с нулевыми степенями подвижности к ведущему звену.
Класс и порядок механизма считается по той группе которая имеет наивысший класс (предложил Артоболевский И.И.).
Порядок группы определяется числом элементов, которыми группа присоединяется к основному механизму.
Пример схем различного порядка приведен на рисунке 2.13.
Класс группы определяется классом наивысшего по классу контура входящего в его состав. Класс контура определяется количеством кинематических пар, которые входят в образующие его звенья.
Номер класса группы равен числу кинематических пар входящих в замкнутый контур, образованный внутренними кинематическими парами за исключением двух поводковой группы, которая условно относится ко второму классу всегда.
Класс и порядок механизма зависят от того, какое звено является ведущим.
Принцип наслоения структурных групп распространяется на механизмы, звенья которых представляют собой твердые тела.
Рычажные механизмы
Применяют в машинах, приборах, аппаратах. Для обеспечения требуемого движения рабочего органа.
Достоинства:
способность передавать большие силы,
разнообразные движения выходного звена,
высокая надежность
Выше представлены кинематические схемы рычажных механизмов. Среди наиболее распространены плоские четырехзвенные рычажные механизмы. Они могут иметь 4 шарнира (шарнирные четырехзвенники), 3 шарнира и 1 поступательную пару или 2 шарнира и 2 поступательные пары.
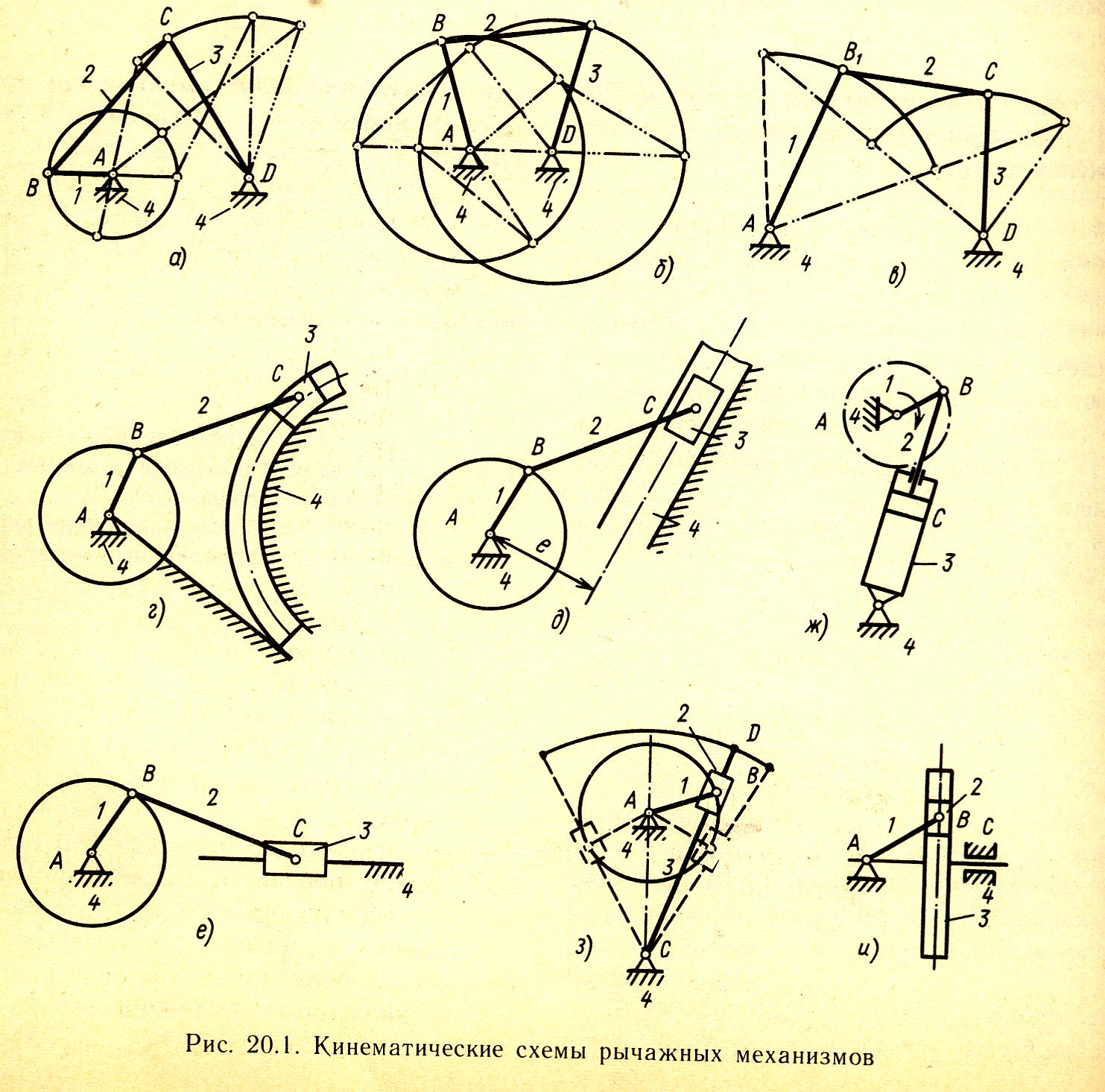
Под буквой а) на рисунке показан шарнирный четырехзвенник. Еще его называют кривошипно-карамысловым механизмом. Его ведущее звено кривошип 1 совершает полно-оборотное вращение, а звено 2 плоско-параллельное движение, а ведомое звено 3 (карамысло) выполняет качательное (возвратно-поступательное) движение или не полно-оборотное вращение. Звено 1 имеющее наименьшую длину, может быть кривошипом если его длинна в сумме с самым длинным звеном будет меньше суммы длин остальных звеньев (правило Грасгофа). Расстояние АД считают длинной неподвижного звена стойки 4. Такой механизма так же может применяться для преобразование качательного движения во вращательное.
Под буков б) изображен кривошипный механизм, у которого сумма самого длинного и самого короткого звена меньше суммы двух остальных звеньев, а за стойку принято самое короткое звено. Механизм преобразует равномерное вращение ведущего звена в неравномерное вращение ведомого вена. В частном случае когда длинны противоположных звеньев одинаковы, ведомое звено так же будет вращаться параллельно.
Под буквой в) изображен двухкарамысловый механизм – шарнирный четырехзвенник у которого размеры звеньев не удовлетворяют правилу Грасгофа или самое короткое звено является шатуном. Используется обычно для качательного движения.
Под буквой д) кривошипно-ползунный не центральный механизм (т.к. линия движения шарнира С не проходит через точку вращения кривошипа А)
Под буквой е) – кривошипно-шатунный центральный механизм. Кривошипно-ползунные механизмы применяются в поршневых двигателях, и ползуны там называются поршнями. Поршень двигателя воспринимает движущую силу и поэтому является ведущим звеном. Здесь возвратно-поступательное движение поршня 3 преобразуется с помощью шатуна 2 во вращательное движение кривошипа 1 ( кривошип 1 это коленчатый вал).
Под буквой ж) изображен кривошипный механизм с качающимся цилиндром.
Под буквой з) – кривошипный механизм с качающейся кулисой
Под буквой и) – синусный механизм. Содержит 2 вращательные пары и 2 поступательные пары.