

Фрикционные механизмы
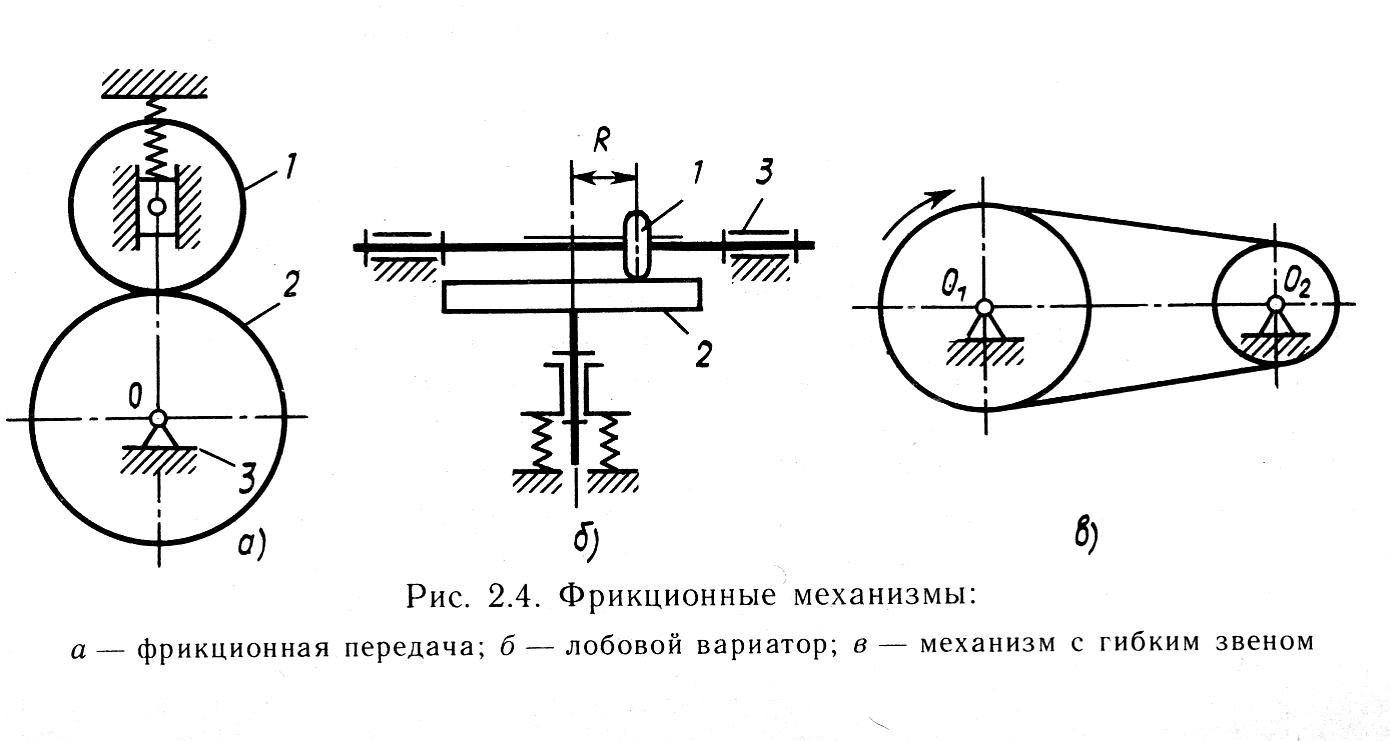
Здесь движение от входного звена(ведущего) передается к выходном(ведомому), за счет сил трения возникающих в контакте этих звеньев. Самая проста передача 2.4 А. Она состоит из двух цилиндрических катков 1 и 2 и неподвижной стойки 3. Один каток прижимается к другому за счет сил упругости пружины. Вариаторы являются фрикционными механизмами (рис 2.4 Б), они обеспечивают главное изменение угловой скорости ведомого звена 2, при равномерном вращении звена «1». Звено «1» перемещается вдоль оси. Вариаторы можно назвать бесступенчатыми передачами. На рис 2.4 В изображен фрикционный механизм с гибкими звеньями (ремни, канаты, нити).
Зубчатые механизмы
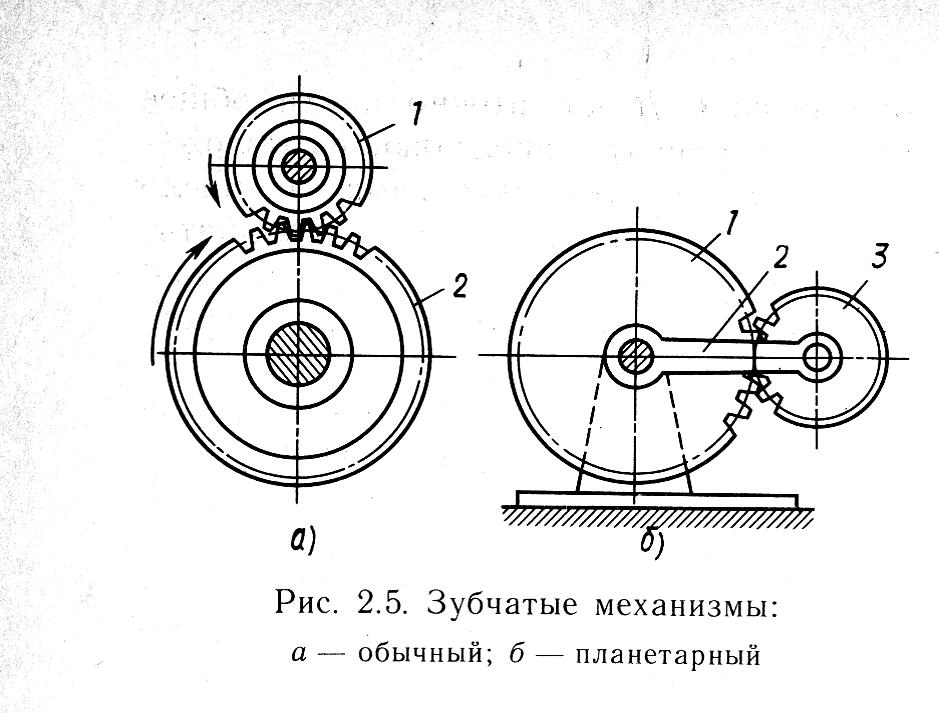
Они образованы зацеплением двух зубчатых колес. Передача нагрузки идет за счет воздействия зубьев друг на друга (силовое замыкание – зацепление зубьев). В отличии от фрикционной здесь исключено проскальзывание звеньев. При передачи вращения между подвижными осями, механизмы называют планетарными (2.5 Б). Здесь ось колеса «3» (колесо «3» называется сателлитом), соединенная с водилом«2» с осью колеса «1», совершает вращательное движение. Колесо «1» главное, колесо «3» называют сателлитом.
Волновые передачи
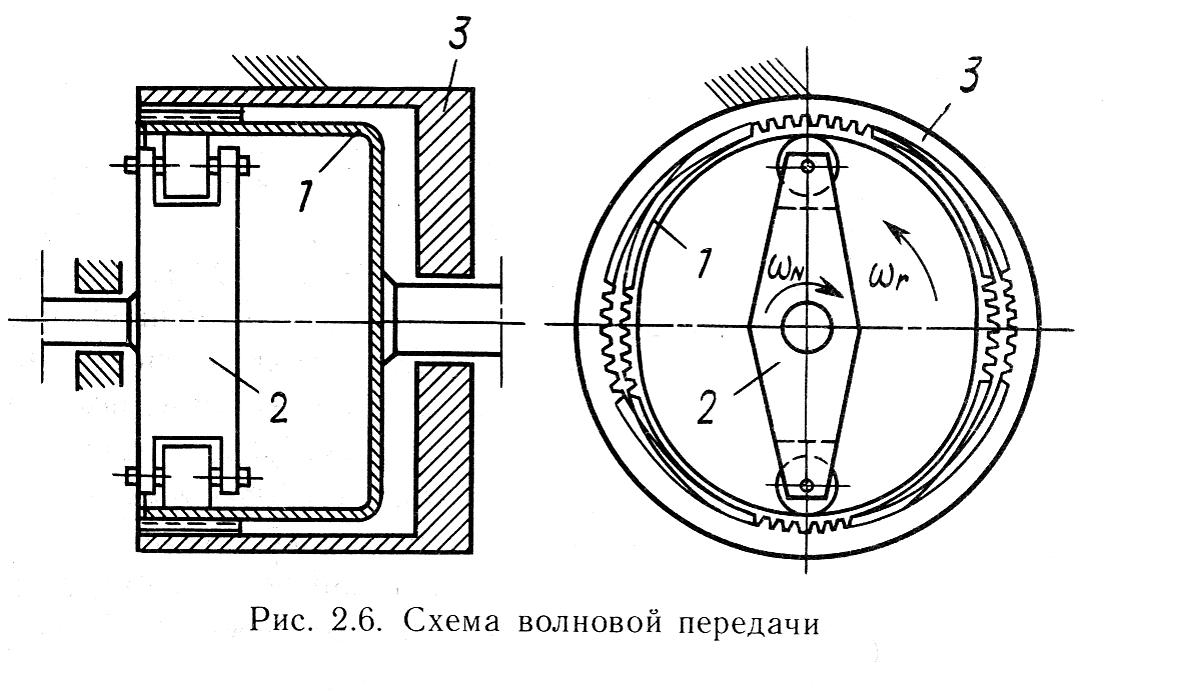
По сути х можно было бы назвать планетарными с гибким сателлитом. В волновых передачах поток мощности распределяется по зонам зацепления с большим количеством зубьев по сравнению с другими зубчатыми механизмами. Ролики генератора волн «2» деформируют, колесо «1»при сборке и вводят его в зубья зацепления зубьями жесткого колеса по большой оси эллипса и выводят из зацепления по малой оси. Движение здесь передается за счет так называемой бегущей волны деформации гибкого колеса. Число зубьев гибкого колеса меньше чем у жесткого.
Мальтийский (крестовидный) механизм
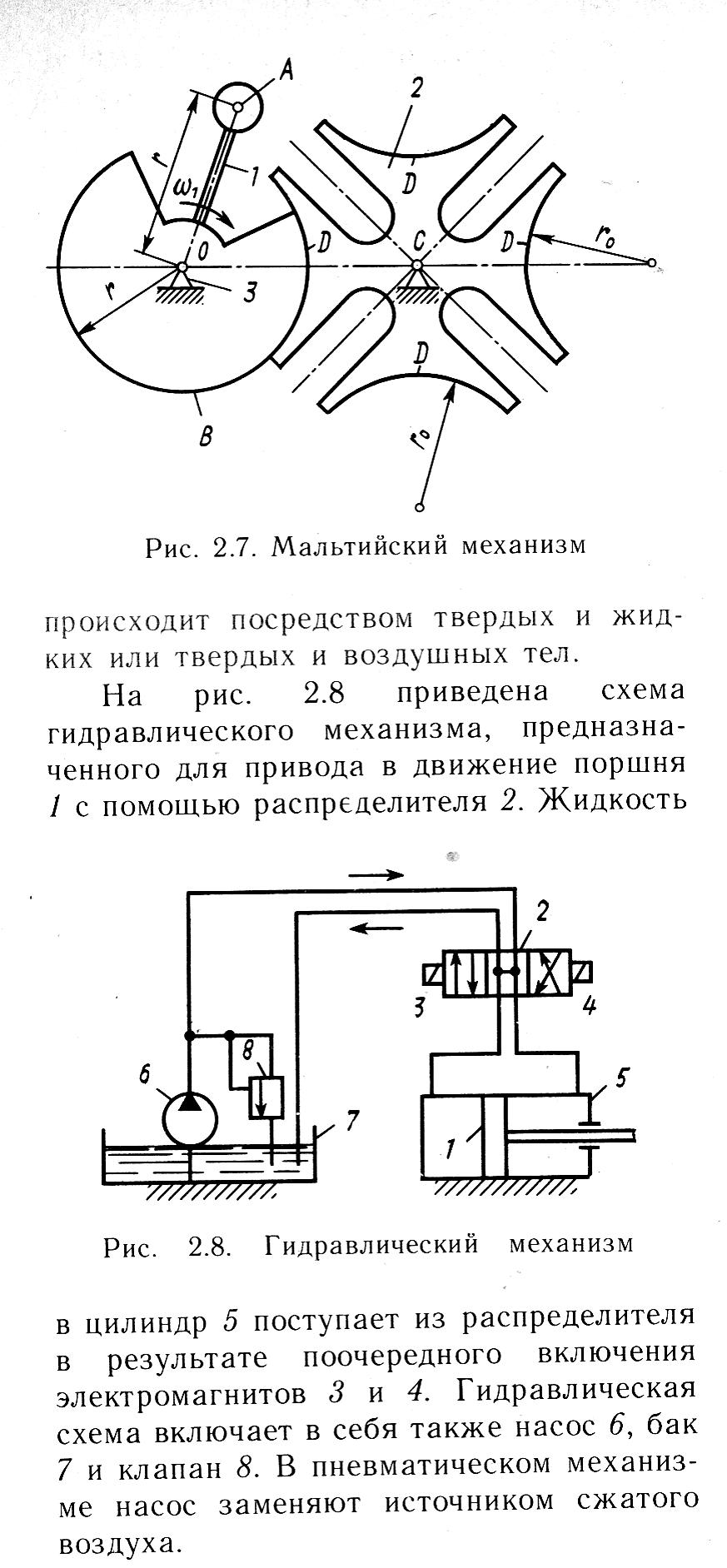
Состоит из трех звеньев. Звено 1 несет на себе зевку, центр А которой удален от оси вращения на расстояние R. А замок B очерчен сектором с радиусом R0. Звено «2» называемое крестом, имеет несколько прорезей (на рис 4) и такое же число замков D, очерченных этим же радиусом R0. Неподвижное звено «3» имеет подшипники с центрами в точках Oи С. Звено «1» вращается равномерно, а звено «2» то вращается, то останавливается. Когда замки BиD соприкасаются по окружности, то звено «2» не подвижно. При дальнейшем вращении звена «1» цевка входит в прорезь звена «2» и крест «2» вращается в направлении противоположном направлению движения звена «1». И крест остается неподвижным до тех пор пока цепка не зайдет в следующую прорезь.
Гидравлические механизмы
Гидравлическими и механическиминазывают такими механизмами в которых преобразование движения идет за счет твердых и жидких или твердых и газообразных тел. На рисунке под цифрой «1» поршень, под цифрой «2» распределитель, поршень приводится в движение распределителем «2». Ц цилиндр «5» поступает жидкость и с распределителя за сет попеременного включения электромагнита «3» и «4». В гидравлических устройствах присутствуют насос «6», бак «7» и клапан «8».