

Прикладная механика включает в себя:
Теория машин и механизмов.
Сопротивление материалов.
Детали машин.
Прикладная механика как наука о машинах и конструкциях выделилась из теоретической механики в конце 19 века.
Теория машин и механизмов
Структурные элементы механизмов
Механизмы представляют собой тел частей механизма, движущиеся как единое целое. Каждое такое тело называется звеном. Звено может быть выполнено без сборочных операций, и тогда оно называется простым. С применением сборочных операций называется сложным. Простые звенья называются деталями. Звенья различают:
По конструктивным признакам(зубчатые колеса, поршень, вал).
По возможности деформации(жесткое, гибкое звено).
По характеру движения ( звено совершающее полное оборотное движение называется кривошипом. При неполно-оборотном вращении называется коромыслом, звено движущееся возвратно-поступательно называется ползуном).
Формирование механизма т.е. соединение его частей в единое целое осуществляется с помощь кинематических пар(соединений, сопряжений), двух соприкасающихся звеньев, допус-х их относительное движение.
Конструктивно любая пара есть подвижное сопряжение соединяемых частей звеньев, в котором силовой поток от одного звена к другому передается за счет геометрического замыкания(запирание с помощью дополнительной детали оси или силового замыкания, прижатие силами упругости или тяжести).
Соединительные части пары контактируют между собой в ненагруженном состоянии в точке, по линии, по поверхности. Кинематические пары передают нагрузку и движение по характеру соприкосновения элементов пары между собой. Пары подразделяются на:
Низшие (звенья между собой контактируют по поверхности).
Высшие (звенья между собой контактируют по линии или точке).
Звенья и кинематические пары
Высшие
кинематические пары имеют меньше потерь
на трении, зато низшие обладают большей
нагрузочной способностью. По числу
наложенных уси-ий связей(С) или степеней
подвижности(Н) на относительное движение
звеньев, кинематические пары делятся
на классы (по предложению Артоболевского).
Для свободного тела в пространстве
число степеней подвижности равно 6, а С
и Н связаны соотношением Н=6 – С, где
С изменяется от 1 до 5. При С=6 кинематическая
пара становиться жестким соединением(звеном).
А при С=0 кинематическая пара не существует,
а 2 звена движутся в пространстве
независимо друг от друга. При С=1,
кинематическая пары имеют 5 степеней
подвижности(5-ти подвижные). При С=1 – 4
степени подвижности.

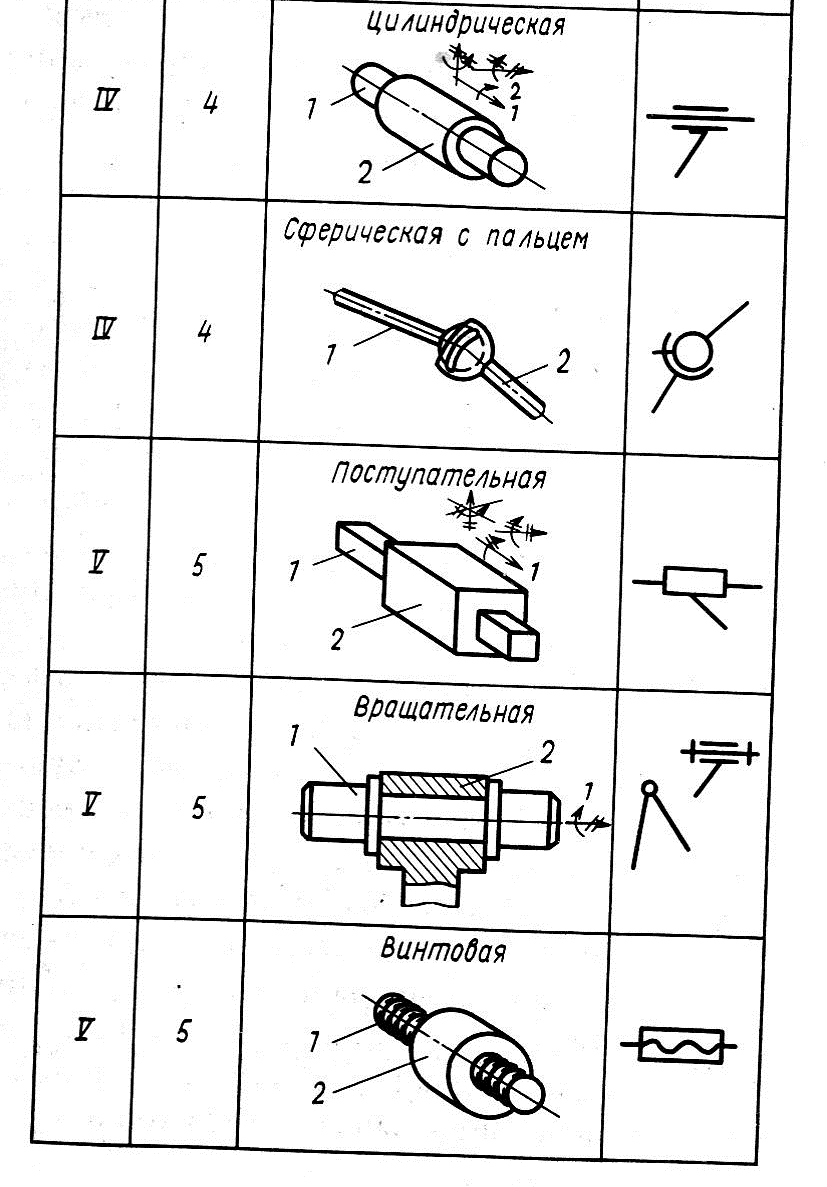
Наиболее распространены кинематические пары 5-го класса (одноподвижные). К ним относятся:
Поступательная
Вращательная
Винтовая
Роль вращательной пары может использовать и более сложная конструкция - шарикоподшипник, роликоподшипник. В винтовой паре между поступательным перемещением L и углом поворота φсуществует зависимость: L=Рφ/2π;Р – шаг резьбы.
Кинематические цепи
Система
звеньев соединенных между собой с
помощью кинематических пар называется
кинематической цепью. В зависимости от
строения разливают замкнутые и
разомкнутые, простые и сложные.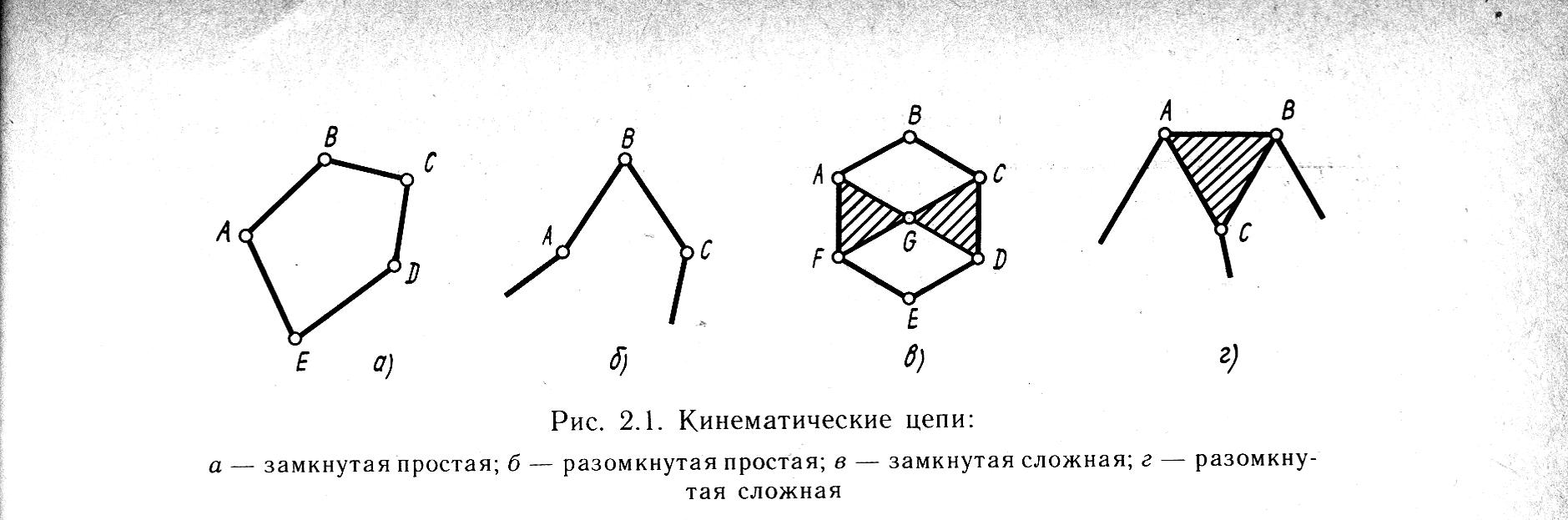
В замкнутой кинематической цепи в каждое звено входит не менее чем 2 кинематические пары. В незамкнутой (открытой) цепи имеются звенья входящие в одну кинематическую цепь.
Механизм – это кинематическая цепь в которой при заданном движении одного или нескольких звеньев относительно любого из них все остальные звенья движутся определенным образом. Звенья относительно которого оценивается параметры движения называется стойкой(корпусом, рамкой, станиной).
В транспортных средствах (автомобиле, самолеты и т.д.) за стойку считают раму, корпус, которые движутся относительно цепи. В цепи различают входные и выходные звенья. Входному звену сообщается движение, а выходное реализует движение. Механизмы могут иметь несколько входных и выходных звеньев.
Обычно число входных звеньев равно числу степеней подвижности механизмов. Кинематические цепи могут быть:
плоскими и пространственными
простыми и сложными
Простой называют кинематическую цепь у которой каждое звено входит в соединение с другим звеном с помощью одной или нескольких пар. В противном случае …..