

Технические характеристики:
Максимальный выходной ток:
Вариант с MOSFET транзисторами – 40 А при Umax < 100В.
Вариант с IGBT транзисторами – 24 А при Umax < 600 B.
Защита от перегрузки по току:
Величина перегрузки тока устанавливается программно.
Напряжение питания:
Вариант с MOSFET транзисторами от 12 до 100 В постоянного или переменного напряжения (1-3ф, 0-400 Гц);
Вариант с IGBT транзисторами от 100 до 600 В постоянного или переменного напряжения (1-3ф, 0-400 Гц);
Максимальная мощность нагрузки:
– < 10 КВт (зависит от напряжения питания и типа электродвигателя);
Защита электродвигателя от перегрева:
Порог максимального нагрева электродвигателя устанавливается программно;
Оптоизолированный CAN интерфейс 2.0 A, 2.0 B – обеспечивает интеграцию c другими блоками и системами управления;
Каналы цифрового ввода-вывода – 4 (TTL) (для подключения датчиков положения ротора);
Каналы оптоизолированного цифрового ввода – 6 (TTL) (для подключения клавиатуры и дополнительных датчиков);
Каналы оптоизолированного цифрового вывода – 4 (TTL) (для подключения дополнительных исполнительных устройств);
Микроконтроллер – 10 млн операций в сек (на плате установлен контроллер M167-2)
Flash память – до 1Мбайт, ОЗУ – 256 Кбайт.
Размер платы:
(без радиатора) – 170х122 мм
Рабочая температура:
0° - 70°С (–40°C - +85°С)
Цифровой синтез сигналов, поступающих с электронного коммутатора на ЭМП, осуществляется программно с помощью микропроцессорного блока управления. Программный синтез сигналов позволяет оперативно изменять частоту, форму и амплитуду выходных импульсов в зависимости от состояния датчиков электропривода / генератора, а также обеспечивает оперативное управление режимами его работы.
Микроконтроллер формирует основные управляющие сигналы, которые поступают на 3- или 4-фазный драйвер, обеспечивающий управление силовыми транзисторами электронного коммутатора. Конфигурация блока питания может быть изменена в зависимости от типа и величины напряжения питания, что позволяет на базе одного блока создавать электроприводы и генераторы различного назначения. При низковольтном напряжении питания (5 - 200 В) в блоке коммутатора используются MOSFET-транзисторы, а при высоковольтном (200 В и более) - IGBT-транзисторы. Применение современных мощных IGBT-транзисторов позволяет создавать электронные коммутаторы мощностью 5000 кВт и более, обеспечивая высокие энергетические и весогабаритные характеристики вентильным реактивным электроприводам / генераторам.
Основная управляющая программа контроллера хранится во Flash-памяти объемом до 256 Кбайт и может быть легко изменена через последовательный интерфейс RS232, что позволяет оперативно изменять основные характеристики и алгоритм работы стартера / генератора в процессе настройки или во время его эксплуатации.
Наличие микропроцессора в системе управления ВРД обеспечивает следующие режимы его работы:
регулирование оборотов в широких пределах и стабилизацию их на заданном уровне;
коррекцию естественно падающей механической характеристики ВРД для оптимизации параметров электропривода с тяговой, вентиляторной, крановой, экскаваторной и другими типами нагрузок;
разгон и торможение с необходимым ускорением;
пуск электропривода без превышения пусковых токов над номинальными, с предварительным выбором люфта редуктора;
рекуперацию энергии при торможении;
реверсирование;
самоторможение для исключения вращения нагруженного электропривода;
шаговый режим работы;
питание от сетей постоянного и переменного (однофазного и 3 фазного) напряжения; для генератора - стабилизацию и формирование выходного напряжения;
выдачу на дисплей текущих параметров электродвигателя / генератора и любой информации, поступающей с периферийных датчиков;
прием и выдачу команд и информации как в аналоговом, так и в цифровом виде;
дистанционное изменение параметров электропривода / генератора и алгоритма его работы;
Для связи с внешними компьютерными системами, активными пультами управления или для обеспечения параллельной работы и синхронизации нескольких электроприводов / генераторов в блоке управления может использоваться сетевой CAN-интерфейс (международный стандарт CAN 2.0 CiA-301). CAN (Controller Area Network) - сетевой интерфейс разработан фирмами "BOSH" и "INTEL" для построения распределенных встраиваемых мультипроцессорных систем реального времени бортового и промышленного назначения. CAN обеспечивает надежную работу системы даже в условиях сильных электромагнитных помех. На рисунке 9 показано подключение нескольких электродвигателей к CAN сети.
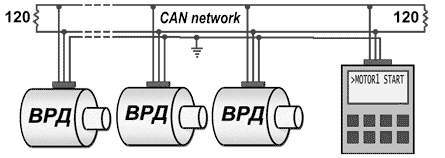
Рис. 9 Подключение нескольких электродвигателей к CAN сети.
CAN сеть обеспечивает эффективный обмен информацией между электронными блоками электродвигателей, а также обмен между пультом или несколькими пультами и каждым электродвигателем. Высокая скорость передачи (до 1Мбит/сек), гибкая система задания приоритетов CAN устройств позволяет передавать по сети синхросигналы или команды с критическим временем выполнения. На рис. 10 приведен пример организации следящей системы с использованием CAN сети.
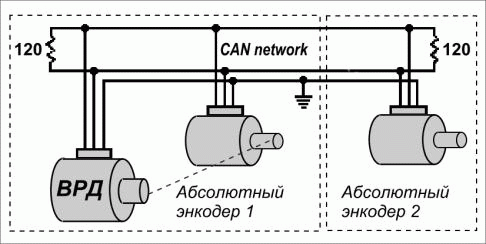
Рис. 10 Пример организации следящей системы с использованием CAN сети