

ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
РОССИЙСКОЙ ФЕДЕРАЦИИ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
УФИМСКИЙ ГОСУДАРСТВЕННЫЙ НЕФТЯНОЙ
ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра «Электротехника и электрооборудование предприятий»
Реферат по курсу «Автоматизированный электропривод»
на тему «Вентильные реактивные электродвигатели и генераторы»
Выполнил студ. гр. АЭ 02-01 М.Р. Садиков
Проверил канд. техн. наук, доц. В.И. Бабакин
Уфа 2006
Содержание
с.
Введение 3
1 Вентильные реактивные электродвигатели / генераторы 3
2 Вентильные реактивные генераторы 10
3 Основные достоинства вентильных реактивных ЭД/Г 13
Список использованных источников 17
Введение
Современный уровень развития регулируемых электроприводов в значительной степени определяется достижениями в области силовой полупроводниковой техники: созданием IGBT и MOSFET транзисторов для коммутации силовых электрических цепей. Это позволило специально для систем электропривода создать электрическую машину нового типа c электронной коммутацией фазных обмоток якоря и получившую название SRM (ближайший перевод на русский язык - машина с модуляцией магнитной проводимости). В качестве рабочего термина нами используется вентильный реактивный электродвигатель (ВРД) / генератор (ВРГ) или вентильный реактивный индукторный электродвигатель / генератор.
1 Вентильные реактивные электродвигатели(Switched Reluctance Motors)
ВРД следует отличать от синхронного реактивного электродвигателя (СРД), который работает при синусоидально изменяющихся напряжениях, подаваемых на фазы его обмотки якоря без обратной связи по положению ротора, при этом СРД обладает низким КПД.
Электрическая машина типа ВРД устроена проще, чем традиционные машины переменного тока - синхронная и асинхронная, она более технологична и менее материалоемка, что создает предпосылки для достижения высоких показателей надежности, экономичности, низкой стоимости и стойкости ее к воздействиям окружающей среды. Впервые в системе управляемого электропривода удается сбалансировать показатели эффективности электронной управляющей части и электромеханического преобразователя машины.
Появление и развитие электроприводов нового типа означает конец эры коллекторных электрических машин, применение которых в разрабатываемых системах электропривода становится анахронизмом. Даже асинхронная машина, повсеместное распространение которой было обусловлено простотой конструкции и надежностью, уступает по этим параметрам ВРД.

Рис 1 Схема ВРД
Конструктивно электропривод состоит из микропроцессорного блока управления, электронного коммутатора и электромеханического преобразователя (ЭМП). Электромеханический преобразователь обеспечивает преобразование электрической энергии, поступающей от электронного коммутатора, в механическую или осуществляет обратное преобразование механической энергии в электрическую. Микропроцессорный блок управления формирует сигналы коммутатора, который генерирует импульсное напряжение питания ЭМП в зависимости от сигналов, поступающих от датчика положения ротора ЭМП. Возможен вариант без датчика положения ротора, в этом случае положение ротора определяется по величине индуктивности обмоток статора.
Отличительную основу ЭМП составляют магнитопроводы статора и ротора с явно выраженными полюсами, выполненные в виде пакетов из листового магнитомягкого материала. Катушки обмотки якоря расположены на полюсах магнитопровода статора. Катушки, находящиеся на противоположных полюсах, соединены попарно последовательно и образуют фазные секции обмотки якоря. На рис. 2 в качестве примеров показаны ЭМП с шестью и восемью полюсами на статоре и четырьмя и шестью полюсами на роторе соответственно.
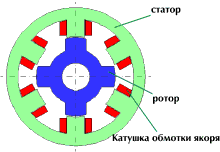

Рис. 2 ЭМП с шестью и восемью полюсами
В зависимости от назначения электродвигателя / генератора и предъявляемых к нему в связи с этим требований, количество полюсов на статоре и на роторе может изменяться. В некоторых случаях на полюсах магнитопровода статора могут быть сделаны дополнительные зубцы. Обмотка якоря, в приведенных на рисунке примерах ЭМП, трехфазная и четырехфазная, соответственно. Количество полюсов статора и ротора, число фаз обмотки якоря может изменяться в зависимости от назначения электродвигателя / генератора. Подбором чисел полюсов статора и ротора может быть получен вращающий момент существенно больший по сравнению с электрическими машинами других типов.
Очевидная конструктивная простота является основным достоинством электромеханического преобразователя ВРД, что позволяет существенно снизить затраты при его изготовлении и обеспечить очень высокую надежность работы электродвигателя / генератора. В качестве примера на рисунках 3, 4, 5 показаны основные части нескольких вариантов ЭМП вентильных реактивных электродвигателей и генераторов.
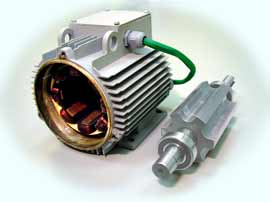

Рис.3 Основные части ЭМП Рис.4 Основные части ЭМП

Рис.5 Основные части ЭМП
На рис.6 приведена механическая характеристика ЭМП в режиме с ограничением тока. Естественная механическая характеристика ЭМП при постоянном питающем напряжении аналогична такой же характеристике коллекторного электродвигателя постоянного тока с последовательным возбуждением.
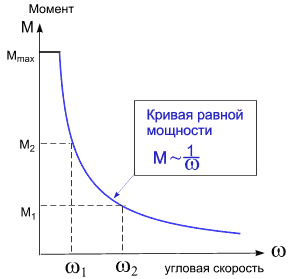
Рис.6 Механическая характеристика ЭМП в режиме с ограничением тока
Особенности электромеханического преобразования энергии в вентильном электродвигателе с переключаемой магнитной проводимостью заключаются в несинусоидальности токов и магнитных потоков в ЭМП и нелинейной зависимости между ними. Эти особенности не позволяют использовать методы, широко применяемые для анализа и синтеза электрических машин переменного тока традиционного конструктивного исполнения. Анализ и синтез ЭМП необходимо осуществлять с непременным учетом дискретности цикла электромеханического преобразования энергии и существенной нелинейной зависимости между токами в фазах и создаваемыми ими магнитными потоками в комплексе "электронный коммутатор - ЭМП".
Для проектирования ЭМП используется современный подход, включающий расчет магнитного поля в нелинейной постановке задачи. При этом учитываются реальные параметры материалов и особенности геометрии устройства. На рис. 7 показаны результаты расчета магнитного поля, представляющие зависимость потокосцепления фазной обмотки от угла поворота ротора и протекающего в ней тока.
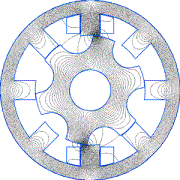
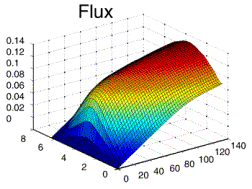
Рис.7 Результаты расчета магнитного поля
Электронный блок управления электродвигателя / генератора представляет собой цифровую систему управления на базе нового поколения 16-разрядных микроконтроллеров производительностью до 40 млн. операций в секунду. Цифровая система управления позволяет резко сократить количество используемых компонентов, увеличить надежность и функциональность системы, уменьшить габаритные размеры электронного блока и его стоимость.
Рис.8 KUMB203 - универсальный цифровой блок управления электродвигателями
На рис. 8 показан блок электроники для электродвигателей / генераторов мощностью до 8 кВт. (Габариты 170х125х30 мм.)
KUBM203 предназначен для управления электродвигателями следующих типов:
1) Электродвигателей постоянного тока:
- с последовательным возбуждением;
- с независимым возбуждением;
- с возбуждением от постоянных магнитов;
2) Асинхронных электродвигателей:
- 2-фазных;
- 3-фазных;
3) Вентильных электродвигателей с постоянными магнитами:
- 2-фазных;
- 3-фазных;
4) Синхронных электродвигателей:
- 2-фазных с постоянными магнитами;
- 2-фазных с возбуждением;
- 3-фазных с постоянными магнитами;
- 3-фазных с возбуждением;
5) Шаговых электродвигателей:
- 2-фазных;
- 3-фазных;
6) Вентильных реактивных электродвигателей (SRM):
- 2-фазных;
- 3-фазных;
- 4-фазных.