

Рулевой привод с жесткой обратной связью.
Жесткая
обратная связь
![]() обеспечивает пропорциональность угла
отклонения руля величине управляющего
сигнала и слабую зависимость этого
отклонения от шарнирного момента.
Сигнал, пропорциональный углу отклонения
руля, при помощи обратной связи
сравнивается с управляющим сигналом.
В качестве элемента обратной связи
может быть использован потенциометрический
датчик, измеряющий угол отклонения
руля. На рис.2 показана структурная схема
рулевого привода с жесткой обратной
связью.
обеспечивает пропорциональность угла
отклонения руля величине управляющего
сигнала и слабую зависимость этого
отклонения от шарнирного момента.
Сигнал, пропорциональный углу отклонения
руля, при помощи обратной связи
сравнивается с управляющим сигналом.
В качестве элемента обратной связи
может быть использован потенциометрический
датчик, измеряющий угол отклонения
руля. На рис.2 показана структурная схема
рулевого привода с жесткой обратной
связью.

Рис.2. Структурная схема рулевого привода с жесткой обратной связью.
Передаточная функция рулевого привода:
или
![]()
где
![]() - постоянная времени рулевого привода,
- постоянная времени рулевого привода,
![]()
![]() -
степень затухания колебаний рулевого
привода,
-
степень затухания колебаний рулевого
привода,
![]()
![]() -коэффициент
передачи рулевого привода,
-коэффициент
передачи рулевого привода,
![]()
Введение жесткой обратной связи, кроме
обеспечения пропорциональности угла
отклонения руля величине управляющего
сигнала, снижает постоянную времени
рулевого привода, т. е. увеличивает его
быстродействие. Частота собственных
колебаний рулевого привода
![]() должна быть примерно на порядок выше
частоты угловых колебаний ЛА.
должна быть примерно на порядок выше
частоты угловых колебаний ЛА.
Синтез системы.
Составим разомкнутую структурную схему рулевого привода с жесткой обратной связью и определим значения коэффициентов.

Рис.3. Структурная схема разомкнутой системы рулевого привода
Для определения коэффициента Ку смоделируем структурную схему разомкнутой системы рулевого привода с жесткой обратной связью в программной среде MathLab.

Рис.4. Структурная схема разомкнутой системы рулевого привода с жесткой обратной связью в среде MathLab
Приведем ЛАФЧХ разомкнутой системы рулевого привода с жесткой обратной связью при значении коэффициентов Ку=10 и Крм=10:
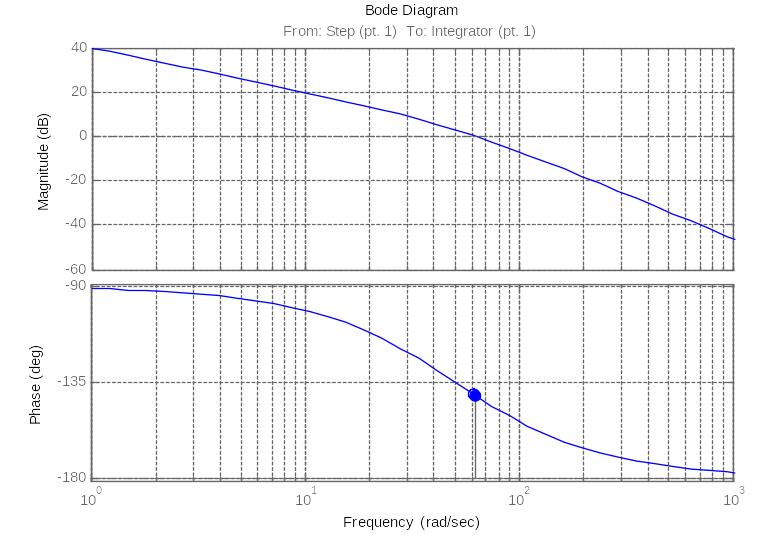
Рис.5. ЛАФЧХ разомкнутой системы рулевого привода.
Из графика видно, что при значении коэффициентов Ку=10 и Крм=10 запас по фазе составляет φ=38.7˚. Из этого следует, что данная система устойчива.
Составим структурную схему замкнутой системы рулевого привода с жесткой обратной связью:

Рис.6. Структурная схема замкнутой системы рулевого привода с жесткой ОС.
Составим структурную схему замкнутой системы рулевого привода с жесткой обратной связью в программной среде MathLab.
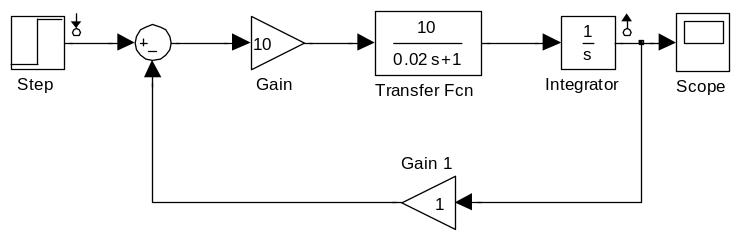
Рис.7. Структурная схема замкнутой системы рулевого привода с жесткой обратной связью.
График
переходного процесса в замкнутом рулевом
приводе с жесткой обратной связью имеет
вид при значении коэффициентов
![]()

Рис.8. Переходный процесс замкнутой системы рулевого привода
Из графика видно, что время переходного процесса в замкнутом рулевом приводе с жесткой обратной связью при значении составляет 0,155с.
Таким образом, при Ку=10, Кр.м.=10 и Тр.м.=0.02 мы получили постоянную времени рулевого привода равной Тр.п.=0.014.
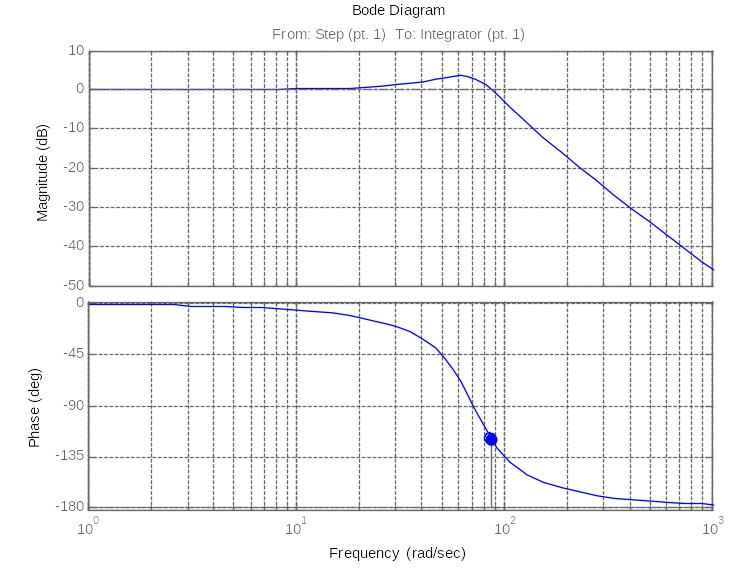
Рис.9. ЛАФЧХ замкнутой системы рулевого привода с жесткой ОС
Структурная схема системы ла – ап
Законом управления или регулирования называют простейшее уравнение, отображающее наиболее существенные связи и преобразования, реализуемые автопилоты.
В соответствии с заданием закон управления автопилотом с управлением по углу и с жесткой обратной связью рулевого привода имеет вид:
![]()
где
 ;
;
 .
.

Рис. 10. Структурная схема разомкнутой системы управления автопилотом
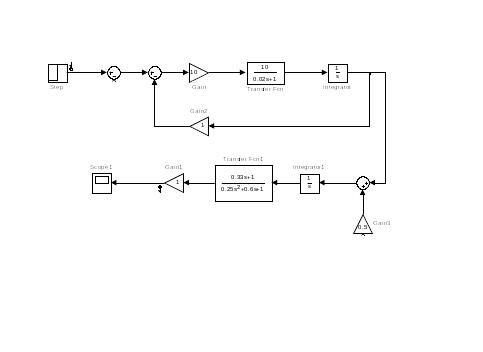
Рис. 11. Структурная схема разомкнутой системы управления автопилотом в среде MathLab
Приведем ЛАФЧХ разомкнутой системы управления автопилотом:
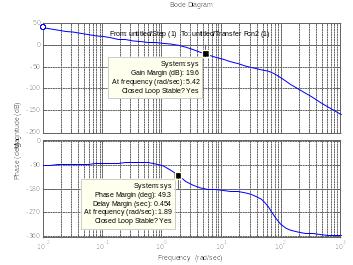
Рис. 12. ЛАФЧХ разомкнутой системы управления автопилотом
При значении коэффициента, Ку =1 запас по фазе составляет Δφ=49,3˚, а запас по амплитуде ΔL =19.6 Дб.
Для
обеспечения необходимых запасов по
фазе и амплитуде вводим корректирующее
звено
![]() .
.
Составим разомкнутую систему управления автопилотом с корректирующим звеном:
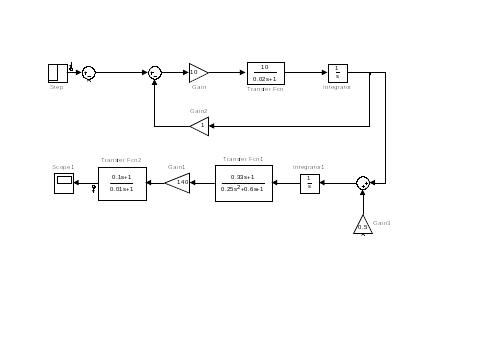
Рис. 13. Структурная схема разомкнутой системы управления автопилотом с корректирующим звеном в среде MathLab
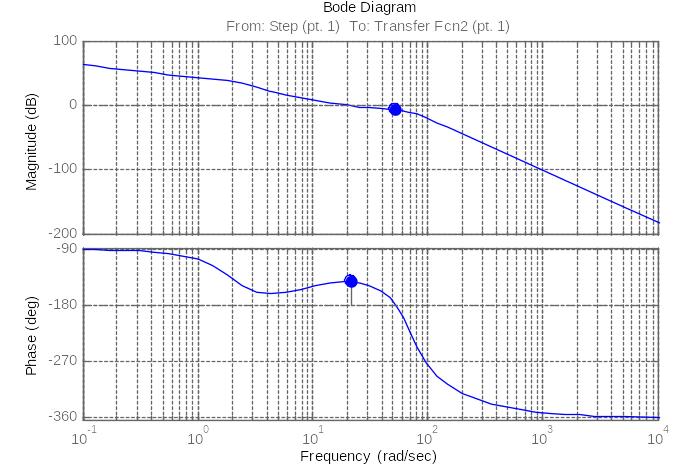
Рис. 14. ЛАФЧХ разомкнутой системы управления автопилотом
Из
графика видно, что при значении
коэффициентов Ку
= Крм.
=10
запас по фазе составляет
![]() 38°,
амплитуда – 6,82 дБ.
38°,
амплитуда – 6,82 дБ.
Составим структурную схему замкнутой системы по отношению к внешнему управляющему моменту и построим ЛАФЧХ и график переходного процесса этой системы.
Структурная схема замкнутой системы по отношению к внешнему управляющему моменту показана на рис 15.
Рис. 15. Структурная схема замкнутой системы управления автопилотом по отношению к внешнему управляющему моменту
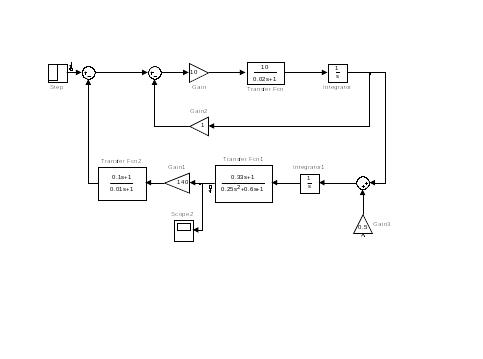
Рис.16. Структурная схема замкнутой системы управления автопилотом по отношению к внешнему управляющему моменту в среде MathLab.
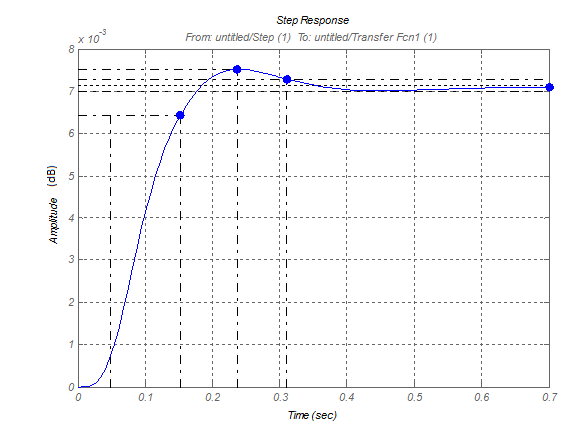
Рис.15. Переходный процесс замкнутой системы по управляющему воздействию.
Из графика видно, что:
Время переходного процесса – 0,311с.
Время нарастания – 0,104с.
Величина перерегулирования – 5,3%
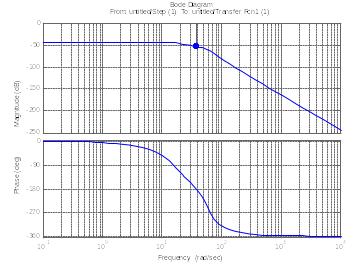
Рис.16. ЛАФЧХ замкнутой системы по управляющему воздействию.
Составим структурную схему замкнутой системы по отношению к внешнему возмущающему моменту и построим ЛАФЧХ и график переходного процесса этой системы.
Структурная схема замкнутой системы по отношению к внешнему управляющему моменту показана на рис 17:
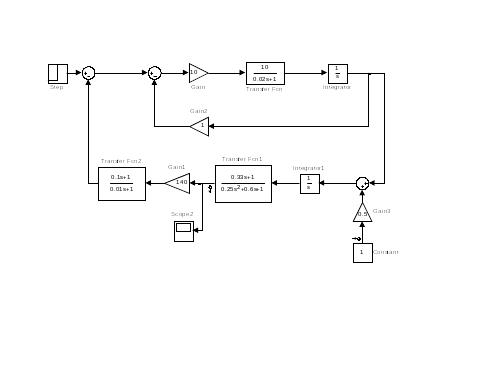
Рис. 17. Структурная схема замкнутой системы управления автопилотом по отношению к внешнему возмущающему моменту в среде MathLab
Построим график переходного процесса замкнутой системы по отношению к внешнему возмущающему моменту.

Рис.18. Переходный процесс замкнутой системы по возмущающему воздействию.
Из графика видим, что:
Время переходного процесса – 0,301с.
Время нарастания – 0,112с.
Величина перерегулирования – 4,79%
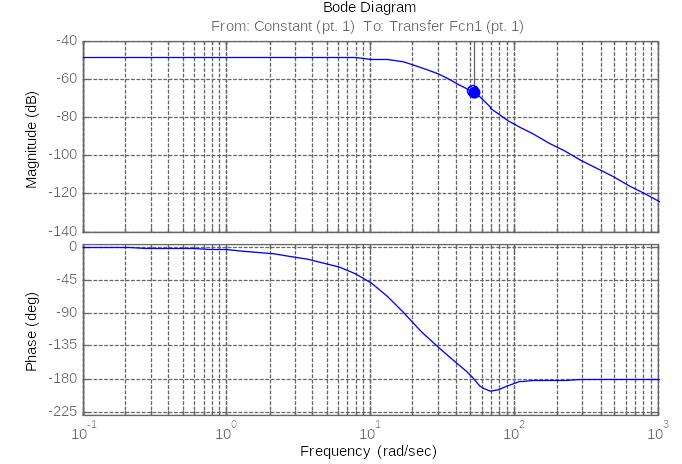
Рис.19. ЛАФЧХ замкнутой системы по возмущающему воздействию
Вывод.
В процессе выполнения работы по синтезу системы угловой стабилизации дозвукового транспортного самолета по заданному курсу была составлена схема сил и моментов, действующих на объект, составлена система уравнений «система угловой стабилизации - транспортный самолет», линеаризована эта система, составлены структурные схемы и получены передаточные функции разомкнутой и замкнутой системы. Методом ЛАФЧХ исследована устойчивость объекта, определено значение общего коэффициента усиления по контуру, при котором система имеет необходимые запасы устойчивости по амплитуде и фазе. Для обеспечения необходимых запасов по фазе и амплитуде ввели корректирующее звено. Построена ЛАФЧХ разомкнутой системы. Построена ЛАФЧХ замкнутой системы по отношению к внешнему возмущающему моменту. Построена ЛАФЧХ замкнутой системы по отношению к управляющему моменту. Построены графики переходных процессов, как реакции на единичное управляющее и возмущающее воздействие.
На основе полученных результатов и анализа построенных ЛАФЧХ и графиков переходных процессов системы угловой стабилизации дозвукового транспортного самолета по заданному курсу можно сказать, что при подобранных значениях коэффициентов система устойчива, имеет хороший запас по фазе и небольшое время переходных процессов.