

При исследовании устойчивости и управляемости самолета пользуются связанной с самолетом правой системой координатных осей с началом координат в цт самолета.
3) Связанная (нормальная) система координат ОХУZ (Вотяков, рис. 151, Щербак, рис. 2.2, 2.3 и Григорьев, рис. 5.2) – в ДП используется для определения положения самолета относительно нормальной системы координат, для изучения равновесия, устойчивости, управляемости и для расчета самолета на прочность. Ее начало координат жестко связаны с ЦМ самолета и при всех его поступательных и вращательных движениях перемещается и вращается вместе с ним, изменяя свое положение в пространстве.
 Направления
осей вращения связанной системы
координат:
Направления
осей вращения связанной системы
координат:
ОХ – Ось продольная, находится в плоскости симметрии самолета (или в параллельной плоскости, если ЦМ смещен относительно плоскости симметрии самолета), и направлена вперед параллельно САХ крыла или продольной оси фюзеляжа.
Момент, стремящийся повернуть самолет вокруг оси ОХ – момент крена Мх; ОУ – Ось нормальная (вертикальная), находится тоже в плоскости симметрии самолета, но направлена вверх перпендикулярно оси ОХ. (Плоскость, проходящая через оси ОХ и ОУ является плоскостью симметрии самолета, делящей его на две равные части – правую и левую).
Момент, стремящийся повернуть самолет вокруг оси ОУ – момент рыскания Му; ОZ – Ось поперечная (боковая), направлена в сторону правого крыла, перпендикулярна плоскости симметрии самоле-та и осям ОХ и ОУ.
Момент, стремящийся повернуть самолет вокруг оси ОZ – момент тангажа МZ, который изменяет угол атаки, при котором появляются моменты: а) Момент кабрирующий – увеличивающий угол атаки;
б) Момент пикирующий – уменьшающий угол атаки;
Положительные моменты:
Мх – если самолет кренится на правое крыло; Му – если разворачивает самолет на право; МZ – если увеличивает угол атаки;
Положение самолета в связанной (нормальной) системе координат определяется тремя углами: а). Угол рыскания «» – угол между проекцией траектории оси ОХg и проекцией продольной оси самолета ОХ на горизонтальную плоскость (Кокунина-рис.2.7в); б) Угол крена «»– угол между вертикальной плоскостью, проходящей через продольную ось ОХ, и нормальной осью самолета ОУ (Кокунина-рис.2.7г) или угол между поперечной осью самолета и горизонтом; с) Угол тангажа «»– угол между осью ОХ и горизонтальной плоскостью ОХgZg;
Связанная система координат ОХУZ удобна при решении вопросов ДП, связанных с вращением самолета вокруг его ЦМ. Углы скольжения (угол между направлением вектора скорости набегающего воздушного потока на самолет и плоскостью симметрии самолета), крена и тангажа – положительные, если самолет скользит на правое крыло, находится в правом крене и его нос поднят над горизонтом. Боковое (поперечное) движение самолета – это вращение самолета относительно осей ОХ и ОУ с перемещением ее вдоль оси ОZ.
Названия плоскостей связанной системы координат: Х О У – плоскость симметрии самолета; X О Z – плоскость крыла (главная ось); У О Z – поперечная плоскость.
Скоростная система координат ОХαУαZα (Григорьев, рис. 5.3 ) – используется для определения аэродинамических сил, как «R», У и Q.
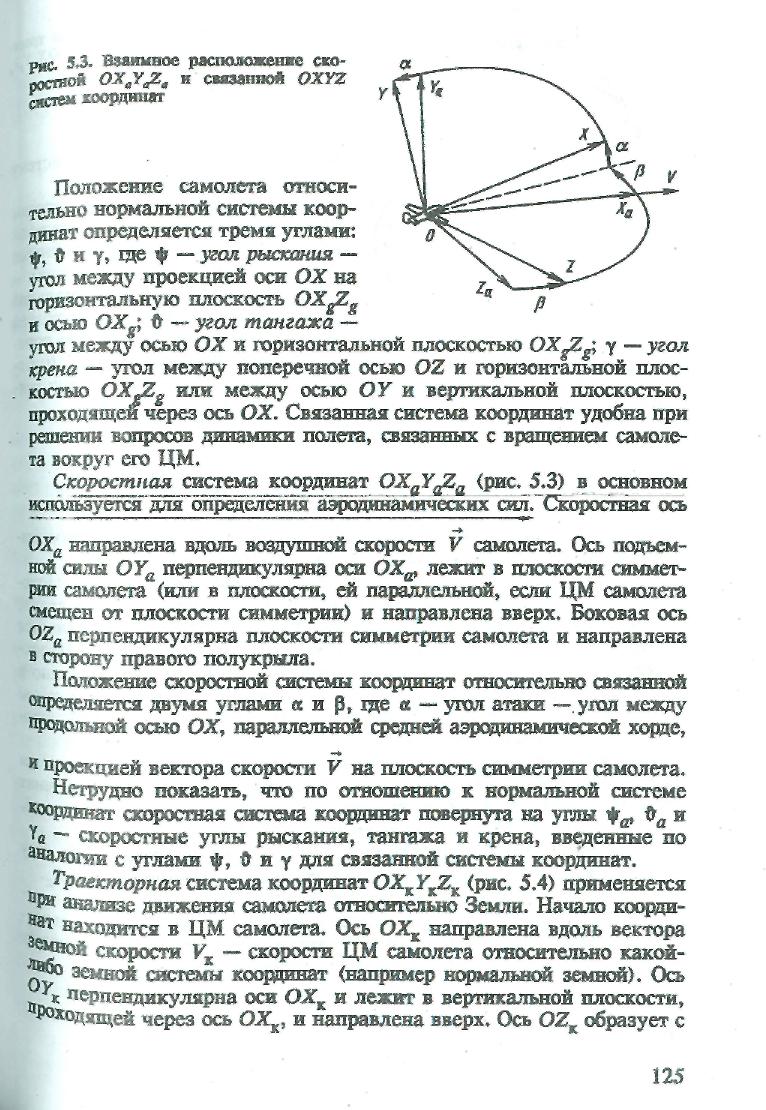
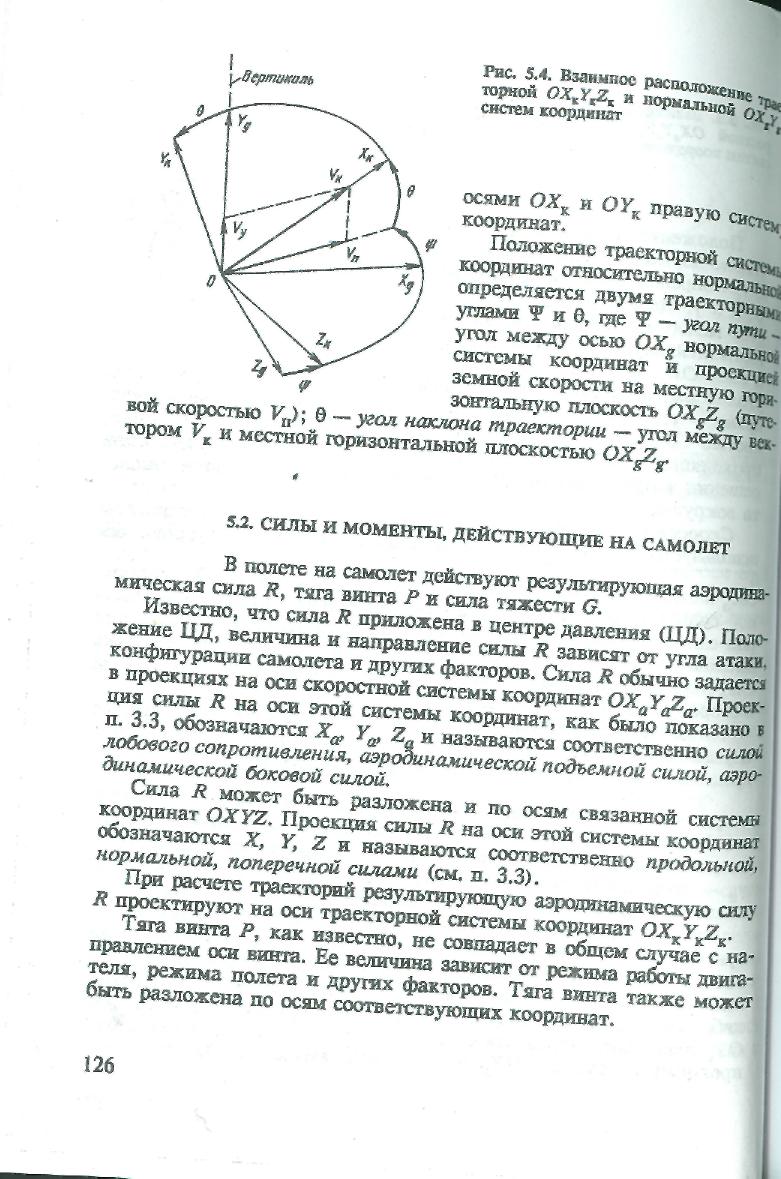
Рис. 5.3. Взаимное расположение скоростной ОХαУαZα Рис. 5.4. Взаимное расположение траекторной ОХк Ук Zк и связанной ОХУZ систем координат. нормальной О0ХgУgZg систем координат.
Направления
осей вращения скоростной
системы координат:
а)
ОХα,
– Скоростная
ось направлена вдоль воздушной скорости
 самолета.
б) ОУα
–
Ось
силы подъемной перпендикулярна оси
ОХα,
лежит в плоскости симметрии самолета
(или
в плоскости, ей параллельной, если ЦМ
самолета смещен от плоскости симметрии)
и
направлена вверх.
с) ОZα
–
Боковая
ось
перпендикулярна
плоскости симметрии самолета и направлена
в сторону правого крыла.
самолета.
б) ОУα
–
Ось
силы подъемной перпендикулярна оси
ОХα,
лежит в плоскости симметрии самолета
(или
в плоскости, ей параллельной, если ЦМ
самолета смещен от плоскости симметрии)
и
направлена вверх.
с) ОZα
–
Боковая
ось
перпендикулярна
плоскости симметрии самолета и направлена
в сторону правого крыла.
Положение
скоростной
системы координат относительно связанной
определяется
углами и:
)
угол
атаки
-
угол
между продольной осью ОХ, параллельной
САХ крыла и проекцией вектора
скорости
 симметрии
самолета.
Скоростная
система координат по отношению к
нормальной системе координат повернута
на углы α,
α
и
α
-
скоростные
углы рыскания, тангажа и крена, введенные
по аналогии с углами ,
и
для
связанной системы координат.
симметрии
самолета.
Скоростная
система координат по отношению к
нормальной системе координат повернута
на углы α,
α
и
α
-
скоростные
углы рыскания, тангажа и крена, введенные
по аналогии с углами ,
и
для
связанной системы координат.
Траекторная система координат ОХк Ук Zк (Григорьев, рис. 5.4) применяется при анализе движения самолета относи- тельно Земли, начало ее координат находится в ЦМ самолета, а ось ОХк направлена вдоль вектора земной скорости «Vк» - скорости ЦМ самолета относительно какой либо земной системы координат (например нормальной земной).
Ось ОУк перпендикулярна оси ОХк и лежит в вертикальной плоскости, проходящей через ось ОХк, и направлена вверх, а ось ОZк образует с осями ОХк и ОУк правую систему координат. Положение траекторной системы координат относительно нормальной определяется двумя траекторными углами и : а) – угол пути - угол между осью ОХg нормальной системы координат и проекцией земной скорости на местную горизонтальную плоскость ОХg Zg (путевой скорости Vп); б) – угол наклона траектории - угол между вектором «Vк» и местной горизонтальной плоскостью ОХg Zg.
Пилотажные свойства самолета. Для выполнения различных режимов полета требуется: А) Полное или частичное равновесие внешних сил, действующих на самолет; Б) Самолет должен быть устойчивым, т.е. способным без вмешательства пилота в управление сохранять установленный режим полета; С) Самолет должен обладать управляемостью - это его способность отвечать соответствующими перемещениями в пространстве на отклонения органов управления, осуществляемые пилотом или автопилотом. Основные сведения о равновесии (балансировки), устойчивости и управляемости самолета. Равновесие сил и моментов. Необходимым условием любого установившегося полета (ГП, набора высоты, планирования) - является равновесие сил действующих на самолет, т.к. только в этом случае движение ЦТ самолета будет прямолинейным равномерным. На величину и направления аэродинамических сил влияет ориентировка самолета относительно воздушного потока: - угол атаки крыла; - угол скольжения самолета; - угол крена. Вывод - при неизменной скорости полета равновесие сил сохраняется тогда, когда сохраняется ориентировка самолета относительно воздушного потока и самолет не стремится повернуться относительно своих осей. Так как вращение самолета возникает под действием сил, проходящих в стороне от его ЦТ, вращающий эффект оценивается быстротой нарастания угловой скорости, т.е. угловым ускорением: а) Момент силы относительно ЦТ самолета - это произведение силы на плечо (расстояние между ЦТ и линией действия силы), т.к. угловое ускорение пропорционально произведению силы на ее плечо; б) Направление момента - направление вращения, возникающего под действием момента. Чтобы вращение не возникало, необходимо взаимно уравновесить моменты всех сил, т.е. балансировка самолета. Балансировка самолета – это сохранения равновесия сил и моментов, действующих на самолет в полете, чтобы не возникало вращения относительно своих взаимно перпендикулярных трех осей, т.е. это процесс уравновешивания моментов, действующих на самолет, путем соответствующего отклонения органов управления (РВ, РН и элеронов). Равенство нулю суммы моментов всех сил, действующих на самолет, означает, что равнодействующая этих сил проходить через ЦТ самолета. Равновесие моментов требуется не только для полета без вращения, но и для полета с равномерным вращением, например, для выполнения установившегося виража, т.к. наличие неуравновешенного момента приводить не просто к вращению, а к ускоренному или замедленному вращению – вращение с постоянной угловой скоростью свидетельствует о равновесии моментов.
Оси вращения самолета. Осями вращении в динамике полета принята связанная система координат, поэтому вращение самолета вокруг его ЦТ можно разложить на вращение вокруг трех взаимно перпендикулярных осей х, у и z, проходящих через ЦТ (Вотяков - рис. 112 ). Направление осей можно выбрать по разному, например: а) если направить ее вдоль вектора скорости самолета, то получим скоростную систему осей; б) если связать ось «х» с самолетом, сделав ее параллельной хорде крыла или оси фюзеляжа, то получится связанная система осей. В этих двух системах ось «у» лежит в плоскости симметрии самолета. В связанной системе ось «х» также находится в плоскости симметрии. В скоростной системе ось «х» не совпадает с этой плоскостью, если самолет летит со скольжением, т.е. движется под углом к своей к плоскости симметрии. Ось «z» перпендикулярна к осям «х» и «у». Когда самолет летит без скольжения, то оси «z» обоих систем, будучи перпендикулярными к плоскости симметрии, совпадают между собой, а оси «х» и «у» связанной системы отклонены от одноименных осей скоростной системы на угол, равный углу атаки крыла. При изучении устойчивости, управляемости и для расчета на прочность (Кокунина-рис.2.6,б и Григорьев-рис.5.2) пользуются связанными осями координат, но приходится рассматривать вращения и вокруг скоростных осей, и чтобы избежать путаницы, оси связанной системы обозначают х1, у1 и z1. Названия моментов вызывающие вращение самолета вокруг взаимно перпендикулярных осей связанной оси координат, начало которой берется в ЦМ самолета (рис.2.8-Кокунина): 1). МZ - Продольный момент, или момент тангажа, стремящийся повернуть самолет вокруг оси «z», т.е. изменить угол тангажа – угол между связанной осью х1 и горизонтом; Продольный момент может быть кабрирующим (стремится увеличить угол тангажа) или пикирующим; 2) Мх - Поперечный момент, или момент крена, стремящийся повернуть самолет вокруг оси «х», т.е. накренить самолет; 3). Му - Путевое момент, или момент рысканья, стремящийся повернуть самолет вокруг оси «у», т.е. изменить курс самолета. Для полного равновесия самолета, помимо равновесия сил, необходимо обеспечить также равновесие моментов относительно всех осей, а именно: продольное равновесие самолета, поперечное равновесие и путевое равновесие.