

Решение:
Вариант
I
решения: Рассматриваемый механизм
находится под действием следующей
системы уравновешивающихся сил: силы
упругости
![]() ,
сил тяжести
вала 1 с шестерней 2,
шестерни 3,
ползуна В,
груза и реакций опор.
,
сил тяжести
вала 1 с шестерней 2,
шестерни 3,
ползуна В,
груза и реакций опор.
Составим
уравнение работ, выражающее принцип
возможных перемещений:
![]()
Связи
наложенные на механизм, допускают
следующие возможные перемещения его
звеньев: поворот вала 1 с шестерней 2 на
угол
![]() ,
поворот шестерни 3 на угол
,
поворот шестерни 3 на угол
![]() и поступательное перемещение груза по
вертикали на
и поступательное перемещение груза по
вертикали на
![]() .
Ползун В может иметь перемещение
.
Ползун В может иметь перемещение
![]() (перемещение по горизонтали), а точка А
– перемещение
(перемещение по горизонтали), а точка А
– перемещение
![]() (отрезок
перпендикулярен ОА).
(отрезок
перпендикулярен ОА).
Уравнение работ, выражающее принцип
возможных перемещений, получает вид
![]() (1).
(1).
Найдем зависимость между возможными
перемещениями точек системы. Поскольку
нить, к которой привязан груз весом
![]() ,
нерастяжима и скольжение между нитью
и валом 1 отсутствует, перемещение груза
равно перемещению точки обода колеса
1. Поэтому угол поворота вала 1 и шестерни
2:
,
нерастяжима и скольжение между нитью
и валом 1 отсутствует, перемещение груза
равно перемещению точки обода колеса
1. Поэтому угол поворота вала 1 и шестерни
2:
![]() .
.
Перемещение точки К обода колеса 2:
![]() .
.
Так как скольжение между шестернями 2
и 3 отсутствует, то возможные перемещения
точек касания этих шестерен равны и
угол поворота шестерни 3:
![]() .
.
Перемещение точки А кривошипа, жестко соединенного с колесом,
![]() .
.
Д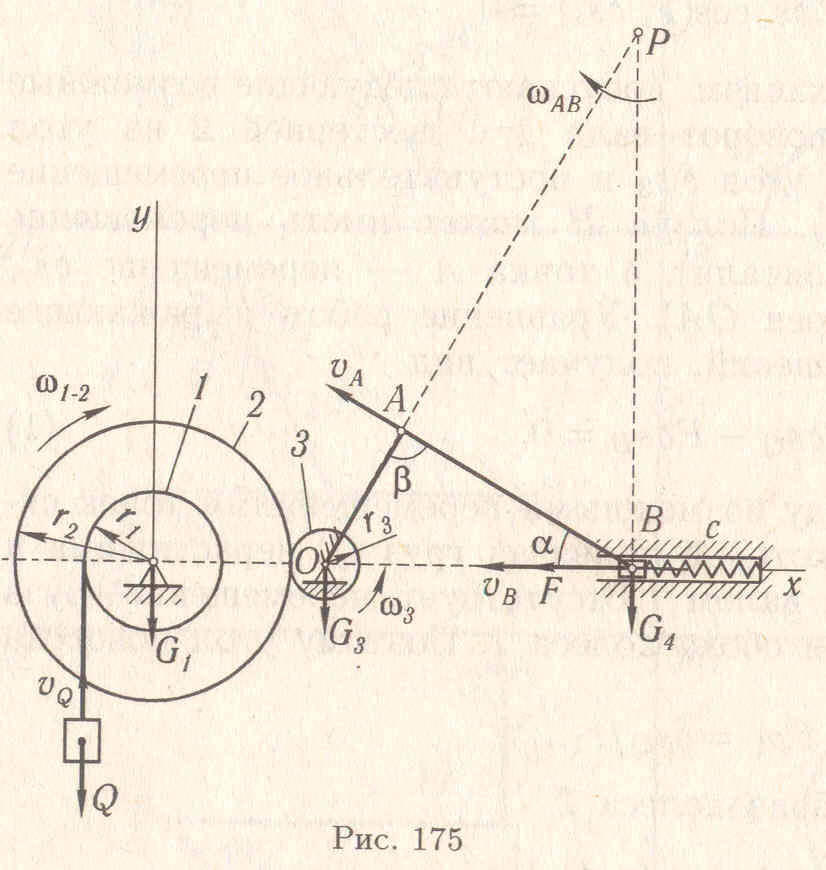 ля
определения зависимости между возможными
перемещениями
и
найдём положение мгновенного центра
вращения звена АВ – точки Р:
ля
определения зависимости между возможными
перемещениями
и
найдём положение мгновенного центра
вращения звена АВ – точки Р:
![]() ,
тогда
,
тогда
![]() .
Из
.
Из
![]() получаем соотношение:
получаем соотношение:
![]() .
.
Теперь:
![]() .
.
Сила
упругости пружины пропорциональна её
деформации:
![]() .
Подставив в уравнение работ (1) выражения
силы упругости и возможных перемещений
точек системы, получим
.
Подставив в уравнение работ (1) выражения
силы упругости и возможных перемещений
точек системы, получим
![]() ,
откуда
,
откуда
 .
Следовательно, пружина сжата на 1,74 см.
.
Следовательно, пружина сжата на 1,74 см.
Вариант
II
решения: Решим эту же задачу
составлением уравнения мощностей,
выражающего принцип возможных скоростей:
![]() или
или
![]() .
Сообщим валу 1 с шестерней 2 возможную
угловую скорость
.
Сообщим валу 1 с шестерней 2 возможную
угловую скорость
![]() вокруг оси О1, допустим, по часовой
стрелке (рис. 175). Груз
получит вертикальную скорость
вокруг оси О1, допустим, по часовой
стрелке (рис. 175). Груз
получит вертикальную скорость
![]() .
Шестерня 3 вместе с жёстко соединённым
с нею кривошипом ОА приобретает угловую
скорость
.
Шестерня 3 вместе с жёстко соединённым
с нею кривошипом ОА приобретает угловую
скорость
![]() вокруг оси О. Звено АВ будет иметь угловую
скорость
вокруг оси О. Звено АВ будет иметь угловую
скорость
![]() ,
которую покажем вокруг мгновенного
центра скоростей
,
которую покажем вокруг мгновенного
центра скоростей
![]() ,
находящегося на пересечении перпендикуляров
к скоростям
,
находящегося на пересечении перпендикуляров
к скоростям
![]() и
и
![]() точек А и В звена АВ (скорость
точки А, принадлежащей кривошипу ОА,
направлена перпендикулярно его
направляющим). Составим уравнение
мощностей:
точек А и В звена АВ (скорость
точки А, принадлежащей кривошипу ОА,
направлена перпендикулярно его
направляющим). Составим уравнение
мощностей:
![]() ,
или
,
или
![]() .
.
Здесь
неизвестными являются деформация
пружины
,
а также скорости
![]() и
.
Скорсть груза равна скорости точек
обода колеса, так как нить, к которой
подвешен груз, нерастяжима, и поэтому
и
.
Скорсть груза равна скорости точек
обода колеса, так как нить, к которой
подвешен груз, нерастяжима, и поэтому
![]() .
Скорости точек касания К шестерен 2 и
3 выражаются соответственно следующим
образом:
.
Скорости точек касания К шестерен 2 и
3 выражаются соответственно следующим
образом:
![]() и
и
![]() ,
они равны между собой так как проскальзывание
в месте контакта шестерен отсутствует.
,
они равны между собой так как проскальзывание
в месте контакта шестерен отсутствует.
Скорость
точки А можно выразить двояко, поскольку
она принадлежит кривошипу ОА и звену
АВ одновременно:
![]() и
и
![]() .
.
Скорость
точки В звена АВ:
![]() .
Таким образом,
.
Таким образом,
![]() ,
,
![]() ,
откуда
,
откуда
 ,
,
 .
.
Скорость
точки В:
 .
.
Из
имеем
![]() .
Следовательно:
.
Следовательно:
 .
.
Итак,
уравнение мощностей приобретает вид:
 .
.
Разделив все члены этого уравнения на , найдём искомую деформацию пружины:
 . Тоесть результат совпадает с вариантом
I.
. Тоесть результат совпадает с вариантом
I.
-------------------------------------------------------------------------------------------------
ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ В СЛУЧАЕ ДВИЖЕНИЯ СИСТЕМЫ. ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ
Если
система получает возможное перемещение,
при котором каждая
точка имеет возможное перемещение
![]() ,
(рис. 253), то сумма работ
этих сил на перемещении
,
должна быть равна нулю:
,
(рис. 253), то сумма работ
этих сил на перемещении
,
должна быть равна нулю:
![]() (117.3)
(117.3)
Уравнение (117.3) называемое общим уравнением динамики, показывает, что в любой момент времени сумма работ всех задаваемых сил и сил инерции материальных точек несвободной механической системы с двусторонними идеальными связями на любом возможном ее перемещении равна нулю.
Дифференциальные уравнения движения механической системы в обобщённых координатах.