

Решение:
1. Составим уравнения кинематической связи движений звеньев, выразив все движения через движение искомого тела 1.
А)
перемещения:
![]() ,
,
 ,
,
 .
.
Б)
скорости:
![]() ,
,
 ,
,
 .
.
В)
ускорения:
![]() ,
,
 ,
,
 .
.
2. Составим дифференциальные уравнения движения трёх звеньев.
А)
звена 1
(большой диск):
![]()
Б)
звена 2
(малый диск):
![]()
В)
звена 3
(груз на нити):
![]()
3.
У нас три неизвестных
![]() ,
,
.
Выразим их через угловое ускорение
искомого звена 1
,
,
.
Выразим их через угловое ускорение
искомого звена 1
![]() :
:
А)
Из уравнения 2В
![]() найдём натяжение нити:
найдём натяжение нити:
 .
.
Б) Из уравнения 2Б , найдём окружное усилие (силу трения) между дисками №1 и №2, подставив из уравнения 3А значение натяжения нити .
![]() и
и
 ,
,
В) Из уравнения 2А найдём угловое ускорение диска №1 :
![]() мы получили дифференциальное
уравнение движения второго порядка
большого диска - звена №1.
мы получили дифференциальное
уравнение движения второго порядка
большого диска - звена №1.
4. Упростим дифференциальное уравнение 3В , подставив в него:
движущий
момент
![]() ,
,
момент
инерции диска №1
![]() ,
,
момент
инерции диска №2
![]() ,
,
окружное
усилие
 ,
,
и
сведя все переменные к одной, искомой
нами, переменной
![]() и времени
:
и времени
:
 Все
члены с переменной (угловым ускорением
диска №1)
сгруппируем с одной стороны, а с переменной
(время) с другой:
Все
члены с переменной (угловым ускорением
диска №1)
сгруппируем с одной стороны, а с переменной
(время) с другой:

окончательно получим дифференциальное уравнение второго порядка вращения диска 1:
![]() .
.
5. Проинтегрировав дифференциальное уравнение первый раз получим уравнение скорости (вращения) этого звена, проинтегрировав второй раз – получим уравнение движения (угла поворота) диска №1.
Уравнение
скорости:

Уравнение
угла поворота:

Для
определения постоянных интегрирования
![]() и
и
![]() используем известные нам начальные
условия задачи:
используем известные нам начальные
условия задачи:
![]() ,
,
![]() ,
,
![]() .
.
Тогда
 ,
,
![]()
 ,
,
![]() .
.
Окончательно уравнение движения звена 1 примет вид:
![]() .
.
Угловое
ускорение диска 1 (в момент времени
![]() сек) будет равно
сек) будет равно
![]() .
.
Натяжение
нити

Окружное усилие (сила трения между дисками 1 и 2)
 .
.
![]() .
.
Задача решена
Принцип Даламбера (метод кинетостатики)
принцип Даламбера для точки:
в произвольный момент движения материальной точки активная сила и реакция связи уравновешиваются условно приложенной силой инерции.
![]() (22.3)
(22.3)
принцип Даламбера для механической системы:
если к каждой точке механической системы кроме реально действующих внешних и внутренних сил прибавить силы инерции, то полученная система сил будет уравновешенной и к ней можно применить уравнение статики.
![]() (22.4)
(22.4)
![]() (22.5)
(22.5)
Равенства (22.4) и (22.5) выражают условия "равновесия" внешних сил (активных и реакций связей) и условно приложенных сил инерции.
З десь
десь
![]() -
главный вектор внешних
сил (активных
и реакций связей).
-
главный вектор внешних
сил (активных
и реакций связей).
![]() - главный вектор сил
инерции. (22.6)
- главный вектор сил
инерции. (22.6)
![]() -
главный момент внешних сил относительно
центра 0.
-
главный момент внешних сил относительно
центра 0.
![]() - главный момент сил
инерции относительно центра 0.
- главный момент сил
инерции относительно центра 0.
Задача 122 (сах.)
На барабан В с неподвижной осью вращения, намотана невесомая нерастяжная нить, до конца которой прикреплен груз А весом Р1 .Барабан В однородный сплошной цилиндр радиусом r и весом Р. Найти угловое ускорение барабана В и натяжение нити, если груз А падает. Силой трения в оси барабана можно пренебречь.
Решение:
В задаче
рассматривается механическая система,
состоящая из груза А и барабана В, которая
движется под действием активных сил
веса![]() ,
,![]() и составляющих реакции неподвижной оси
и составляющих реакции неподвижной оси
![]() и
и
![]() .
.
Решим задачу с помощью принципа
Даламбера, для чего к каждой массе,
что находится в движении, прибавим силы
инерции. Груз А движется поступательно
вниз с ускорением, поэтому к нему приложим
силу инерции как к точке с массой:
 ,
то есть
,
то есть

Вектор
![]() направлен
противоположно вектору ускорения тела
А
направлен
противоположно вектору ускорения тела
А
![]() .
.
Барабан
В вращается вокруг неподвижной оси,
поэтому ускорение его центра тяжести![]() ,
,
а
главный вектор сил инерции барабана В
будет:
 .
.
Главный момент сил инерции барабана В относительно оси вращения ВХ будет:

Вектор
главного момента сил инерции
![]() направлен
противоположно вектору углового
ускорения
направлен
противоположно вектору углового
ускорения
![]() .
.
Следовательно,
приложив к механической системе силы
инерции, мы получили уравновешенную
систему сил и моментов
![]() ,
которая эквивалентна 0. *)
,
которая эквивалентна 0. *)
Поэтому мы имеем право составить для нее уравнения равновесия. Запишем сумму моментов всех сил относительно оси ВХ.
![]() - потому что эти силы пересекают ось ВХ.
- потому что эти силы пересекают ось ВХ.
![]() ;
момент активной силы
;
момент активной силы
![]() (вес
тела А), приложенной к диску В.
(вес
тела А), приложенной к диску В.
 ;
(момент силы инерции тела В отрицательный,
потому что направлен противоположно
вектору углового ускорения
).
;
(момент силы инерции тела В отрицательный,
потому что направлен противоположно
вектору углового ускорения
).
Составим уравнение равновесия всех
моментов, действующих на диск В, которое
должно, согласно *),
равняться нулю:
![]() .
.
Е го
составляющие:
го
составляющие:
 .
.
Из этого
уравнения найдём
- угловое ускорение барабана В: 
Для
нахождения натяга нити Т рассмотрим
отдельно груз А, к которому будут
приложены силы,
,![]() и
- реакция нити. По принципу Даламбера
система сил
и
- реакция нити. По принципу Даламбера
система сил
![]() (эквивалентная 0), а потому уравнение
равновесия будет иметь обобщенный вид
(эквивалентная 0), а потому уравнение
равновесия будет иметь обобщенный вид
![]() .
.
Найдём
составляющие уравнения равновесия:
![]() .
.
Откуда сила натяга нити:
 .
.
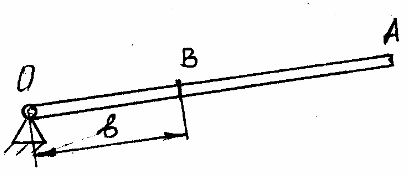
Задача 41.18 (41.21) Тонкий однородный стержень массой М и длиной l вращается с постоянной угловой скоростью вокруг неподвижной оси ОХ, что перпендикулярная к стержню и проходит через его конец.
Найти силу, что растягивает в поперечном сечении В стержень. Сечение В расположено на расстоянии ОВ от оси О.
Решение:

Сила
,
что растягивает стержень в сечении В,
является внутренней силой для стержня
ОА. Чтобы ее получить, разрежем стержень
в точке В и рассмотрим движение правой
части ВА стержня. На эту часть будет
действовать сила отброшенной части ОВ,
которая равна
.
По принципу Даламбера эта сила будет
уравновешена центробежной силой инерции,
то есть
![]() .
.
Приложим бесконечно малую силу инерции
![]() к произвольной точке К на части стержня
ВА, что находится на расстоянии
к произвольной точке К на части стержня
ВА, что находится на расстоянии
![]() от оси вращения. Так как стержень ОА
вращается равномерно, то касательное
ускорение точки К
от оси вращения. Так как стержень ОА
вращается равномерно, то касательное
ускорение точки К
![]() ,
а нормальное
,
а нормальное
![]() и направлено к центру вращения О. Тогда
бесконечно малая центробежная сила
инерции, что приложена к точке К массой
и направлено к центру вращения О. Тогда
бесконечно малая центробежная сила
инерции, что приложена к точке К массой
![]() ,
будет равняться
,
будет равняться
![]() .
.
Бесконечно
малая масса
![]() - это масса бесконечно малой части
стержня длиной
- это масса бесконечно малой части
стержня длиной
![]() .
.
По
величине она будет равна:
 ,
где
,
где - масса единицы длины стержня. Следовательно
бесконечно малая сила инерции
равна:
- масса единицы длины стержня. Следовательно
бесконечно малая сила инерции
равна:
 .
.
Эта
центробежная бесконечно малая сила
инерции
направлена всегда от центра вращения
О, или противоположно
![]() .
Тогда равнодействующая всех сил инерции,
что нужно приложить к каждой точке части
ВА стержня, будет определяться интегральной
формулой:
.
Тогда равнодействующая всех сил инерции,
что нужно приложить к каждой точке части
ВА стержня, будет определяться интегральной
формулой:

а потому
сила растяжения стержня
 .
.
Максимальная сила растяжения будет при ОВ = 0, тоесть в подшипнике О, и она будет равна:
 .
Здесь
.
Здесь
 -
нормальное ускорение центра тяжести
стержня.
-
нормальное ускорение центра тяжести
стержня.
Но
согласно формулы (22.6) главный вектор
сил инерции равен:
![]() .
.
И если нужно было бы вычислить растяжение стержня в точке О, то можно было бы обойтись и без интегрирования.
Приложение №9 б к Методическому пособию IV семестр
Метод кинетостатики (принцип Германа Эйлера Даламбера)
Пример решения задачи №61.(Яблонский стр. 281, Курс теормеха часть2)
Д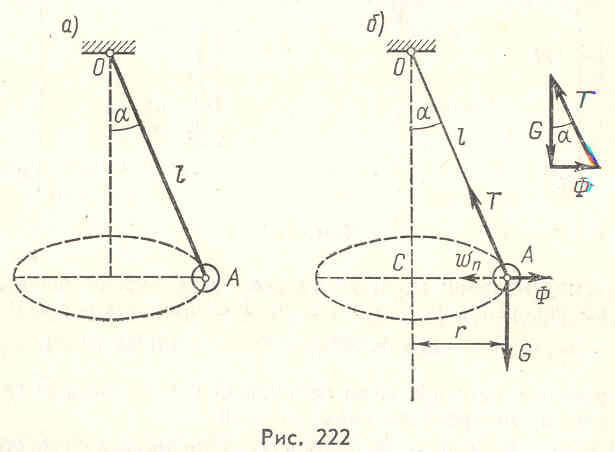 ано:
Шарик А весом
ано:
Шарик А весом
![]() подвешен на нити длиной
подвешен на нити длиной
![]() ,
закреплённой в неподвижной точке О.
Шарику сообщено равномерное движение
по окружности в горизонтальной плоскости,
при котором угол наклона нити к вертикали
составляет
,
закреплённой в неподвижной точке О.
Шарику сообщено равномерное движение
по окружности в горизонтальной плоскости,
при котором угол наклона нити к вертикали
составляет
![]() .
.
Определить: натяжение нити и скорость шарика этого конического маятника.
Решение:
Прикладываем к шарику действующие на
него силы: силу тяжести
![]() и реакцию нити
.
Условно приложим к шарику и его силу
инерции
и реакцию нити
.
Условно приложим к шарику и его силу
инерции
![]() .
Так как вращение равномерное, то сила
инерции состоит только с центробежной
составляющей (направленной противоположно
нормальному ускорению):
.
Так как вращение равномерное, то сила
инерции состоит только с центробежной
составляющей (направленной противоположно
нормальному ускорению):
 ,
где
,
где
![]() .
Построим замкнутый треугольник сил
,
,
.
Из этого треугольника определяем модули
сил
,
:
.
Построим замкнутый треугольник сил
,
,
.
Из этого треугольника определяем модули
сил
,
:
 .
.
![]() .
Определив модуль силы инерции, мы можем
найти скорость шарика А:
.
Определив модуль силы инерции, мы можем
найти скорость шарика А:
 .
.
Приложение №7а к Методическому пособию IV семестр
Тесты. Принцип возможных перемещений (Общее уравнение статики)
П ример
решения задач: Дано:К
кивошипу ОА приложен момент
ример
решения задач: Дано:К
кивошипу ОА приложен момент
![]() ,
при этом длина кривошипа
,
при этом длина кривошипа
![]() .
Определить: Модуль
силы
.
Определить: Модуль
силы
![]() ,
приложенной к толкателю (смотри рисунок),
обеспечивающей нахождение механизма
в равновесии.
,
приложенной к толкателю (смотри рисунок),
обеспечивающей нахождение механизма
в равновесии.
Покажем решение этой задачи методом статики.
Решение:
Для обеспечения равновесия шатуна АВ,
соединяющего кривошип ОА и ползун В,
все внешние силы и реакции связей шатуна
должны составить систему сил эквивалентную
0. В аналитическом виде эта система сил,
приложенных к шатуну АВ будет уравновешенной
при выполнении следующих условий:
![]() и
и
![]() .
.
При
составлении уравнений равновесия учтём,
что толкатель 1 давит на шатун АВ с силой
через скользящую трубчатую насадку,
т.е. усилие может передаваться от
толкателя только перпендикулярно оси
шатуна АВ. Учтём также, что реакция
связи ползуна В направлена перпендикулярно
оси рабочего хода полуна, т.е. вдоль оси
![]() .
Тогда уравнения равновесия примут вид:
.
Тогда уравнения равновесия примут вид:
![]() и
и
![]() ,
где
,
где
![]() .
С другой стороны от активного момента
М на конце А кривошипа ОА развивается
сила:
.
С другой стороны от активного момента
М на конце А кривошипа ОА развивается
сила:
 .
Сопоставив два последних равенства
найдём
.
Сопоставив два последних равенства
найдём
 .
.
---------------------------------------------------------------------------------------------------