


ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО КУЛЬТУРЕ И КИНЕМАТОГРАФИИ
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
КИНО И ТЕЛЕВИДЕНИЯ»

Кафедра электротехники
КуРСОВАЯ РАБОТА
ПО ДИСЦИПЛИНЕ:
«Электрические микромашины»
Выполнил студент вечернего отделения:
Костромской А. Н. гр.7811
Проверил доцент кафедры электротехники:
Виктор Алексеевич Медников.
Задание № 23 для асинхронного двигателя
Задание №34 для бесконтактного двигателя постоянного тока
Санкт – Петербург
2011 г.
Содержание
Содержание 2 Введение 3 §1 Теоретическая часть 6 §1.1 Трёхфазные асинхронные двигатели 6 §1.2 Бесконтактный двигатель постоянного тока 8 §2 Практическая часть 9 §2.1 Двигатель на переменном токе 9 §2.2 Расчёт двигателя на постоянном токе 17 Список используемых источников информации 23
Введение
Структурная схема автоматизированного электропривода.
Электрическим приводом (электропривод) называется устройство, посредством которого осуществляется движение рабочих частей машины.
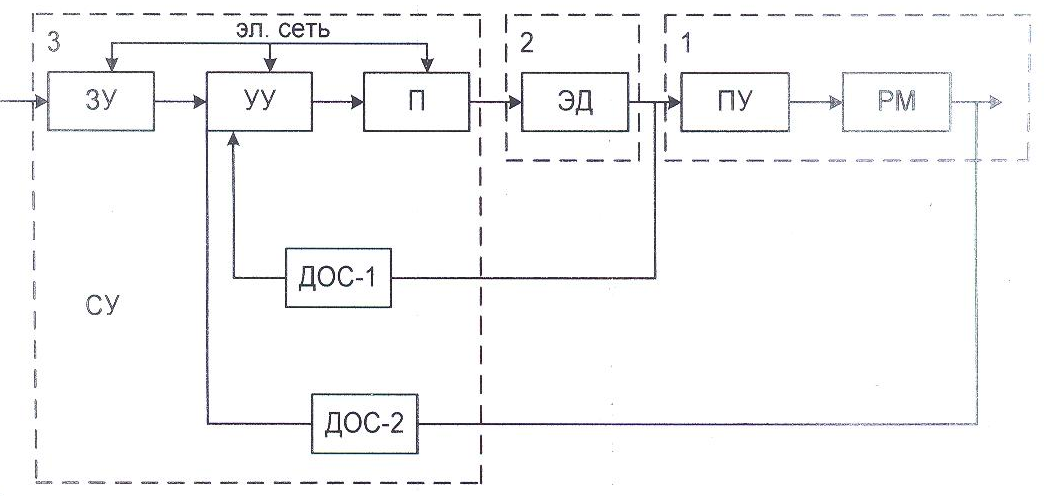
Структурная схема электропривода состоит из трёх основных элементов:
Механическая часть двигателя, включающая рабочий механизм, передаточное устройство, предназначенное для передачи механической энергии от электродвигателя к исполнительному органу машины и для изменения вида и скорости движения и усилия (момент вращения);
Электродвигатель, предназначенный для преобразования электрической энергии в механическую;
Система управления, состоящая из силовой преобразовательной части (преобразователя), управляющего устройства. Преобразователь предназначен для питания двигателя и создания управляющего воздействия на него. Он преобразует род тока и напряжения, или частоту, либо изменяет иные качества электрической энергии, подводимые к двигателю. Управляющее устройство управляет процессом электропривода (осуществляет пуск, остановку, регулирование частоты вращения и т.д.).
По степени управляемости электропривод может быть:
Нерегулируемый – для приведения в действие исполнительного органа машины с одной рабочей скоростью, параметры привода изменяются только в результате возмущающихся воздействий (например, момента сопротивления исполнительного органа).
Регулируемый – для сообщения изменяемой или неизменяемой частоты вращения исполнительному органу машины, параметры привода могут изменяться под воздействием управляющего устройства;
Программно–управляемый – управляемый в соответствии с заданной программой.
Следящий – автоматически отрабатывающий перемещение исполнительного органа рабочей машины с определённой точностью в соответствии с произвольно меняющимся заданным сигналом;
Адаптивный – автоматически избирающий структуру или параметры системы управления при изменении условий работы машины с целью выработки оптимального режима.
По роду управляющего устройства электропривод может быть:
Редукторный – в котором электродвигатель передаёт вращательное движение передаточному устройству, содержащему редуктор;
Безредукторный – в котором осуществляется передача движения от электродвигателя либо непосредственно рабочему органу, либо через передаточное устройство, не содержащее редуктор.
По уровню автоматизации электропривод может быть:
Неавтоматизированный – ручное управление;
Автоматизированный – управляется автоматически регулированием параметров;
Автоматический – управляющее воздействие вырабатывается автоматическим устройство без участия оператора.
По роду тока:
Переменного тока;
Постоянного тока.
Общие соображения по выбору двигателя:
 должно соответствовать
должно соответствовать
 в сети питающей;
в сети питающей; должна быть равна
должна быть равна
 для привода с небольшим запасом, но он
не должен быть большим, так как это
приводит к понижению КПД и
для привода с небольшим запасом, но он
не должен быть большим, так как это
приводит к понижению КПД и
 ;
;Вращающий момент должен быть достаточен для преодоления момента сопротивления машины во время её пуска, а так же во время толчков;
 (
( )
должно быть к числу оборотов рабочей
машины;
)
должно быть к числу оборотов рабочей
машины;Конструктивно двигатель должен удобно сопрягаться;
Форма должна соответствовать условиям среды.
§1.Теоретическая часть
§1.1 Трёхфазные асинхронные двигатели
Асинхронные машины в настоящее время являются самыми распространенными машинами в народном хозяйстве. В основном они используются как двигатели, реже – как генераторы. На долю асинхронных двигателей приходится не менее 80% всех электродвигателей, выпускаемых промышленностью. Они широко используются в устройствах автоматики и телемеханики, бытовых и медицинских приборах, устройствах звукозаписи и т.п. Широкое распространение асинхронных двигателей объясняется простотой их конструкции, надежностью в работе, хорошими эксплуатационными свойствами, невысокой стоимостью и простотой в обслуживании.
Трёхфазный асинхронный двигатель состоит из двух частей: неподвижной – статора и подвижной – ротора. На статоре имеются три обмотки, расположенные под углами 120°, к которым подводится трёхфазное напряжение. Токи, идущие через эти обмотки, создают вращающий магнитный поток (магнитное поле). Поток, пересекая обмотку, находящуюся на роторе, индуцирует в ней э.д.с. Так как обмотка ротора замкнута, то через неё идёт ток. Взаимодействие этого тока с магнитным полем статора создаёт вращающий момент, приложенный к ротору.
Если частота вращения ротора и частота вращения поля статора одинаковы, то магнитный поток статора неподвижен относительно обмотки ротора. Тогда в роторе э.д.с. индукции отсутствует, вследствие чего отсутствует и механический момент. Ротор должен остановиться. Но как только ротор останавливается, в нем возникает э.д.с. индукции и вращающий момент. Это приводит к тому, что ротор всегда вращается асинхронно, т.е. с частотой, отличной от частоты вращения магнитного поля статора.
Асинхронную машину, у которой отмотки ротора замкнуты накоротко и не имеют выводных концов, называют короткозамкнутой.
Величина, характеризующая отставание частоты вращения ротора от частоты вращения потока статора, называется скольжением. Она равна:
![]()
, где
![]() – частота вращения ротора;
– частота вращения ротора;
![]() – частота вращения
магнитного поля (потока) статора,
– частота вращения
магнитного поля (потока) статора,
![]() ;
;
,где
![]() – число пар полюсов двигателя;
– число пар полюсов двигателя;
![]() – частота тока,
Гц.
– частота тока,
Гц.
В процессе работы асинхронного двигателя происходит преобразование электрической энергии в механическую. Энергия, поступающая к двигателю от сети, через магнитное поле передаётся ротору и преобразуется в механическую. Эта энергия называется электромагнитной.
Механический
момент асвинхронного вдвигателя зависит
от электромагнитной мощности и угловой
скорости вращения магнитного потока.
![]() ,
где М – магнитный момент, Дж;
,
где М – магнитный момент, Дж;
![]() – электромагнитная
мощность, Вт;
– электромагнитная
мощность, Вт;
![]() – угловая скорость
вращения магнитного потока,
– угловая скорость
вращения магнитного потока,
![]() .
.
В подавляющем большинстве случаев трёхфазный асинхронный двигатель запускается включением обмотки статора в сеть на полное напряжение – прямой пуск. В кинотехнике, однако иногда возникает необходимость уменьшения ускорения при пуске. С этой целью двигатель запускают при пониженном напряжении, вводя на время пуска сопротивление в цепь статора.
§1.2 Бесконтактный двигатель постоянного тока
Для нормальной работы двигателя постоянного тока необходимо изменять направление тока в проводниках якорной обмотки при изменении его положения относительно полюсов магнитного поля статора. Это переключение в обычных двигателях постоянного тока обеспечивается с помощью коллектора. Однако наличие этого устройства, принципиально необходимого для двигателей постоянного тока, вызывает появление у этих двигателей некоторых нежелательных свойств.
В первую очередь к ним относится необходимость постоянного надзора и ухода за коллекторно-щеточным узлом, так как при эксплуатации двигателя щетки истираются, а коллектор загрязняется и обгорает. Кроме того, неизбежное искрение щеточно-коллекторного аппарата создает радиопомехи, затрудняет применение двигателей во взрывоопасных помещениях и средах. Работа коллекторно-щеточного узла создает также дополнительный шум при работе двигателя.
Стремление устранить механический коллекторно-щеточный узел и заменить его каким-либо бесконтактным устройством с теми же функциями привело к появлению так называемых бесконтактных двигателей постоянного тока. Эти двигатели имеют такие же характеристики, как двигатели с обычным коллектором, но обладают более высокой надежностью и простотой в эксплуатации, не создают при своей работе радиопомех и дополнительного шума.
В настоящее время разработано несколько видов таких двигателей, отличающихся друг от друга способом возбуждения, схемами включения обмоток и типами электрических коммутирующих устройств.
Подробное описание всех типов бесконтактных двигателей постоянного тока выполнить очень трудно.