

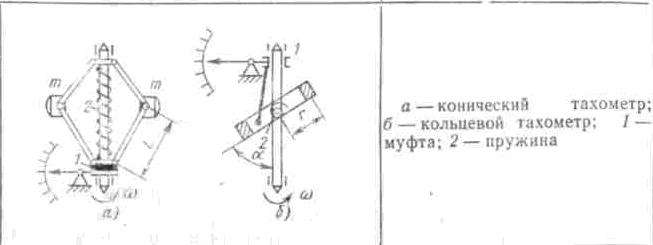
Тахометры: принцип роботы основные характеристики. Центробежные датчики:
Чувствительный элемент реагирует на центробежную силу, развиваемую неуравновешенными массами при вращении вала.
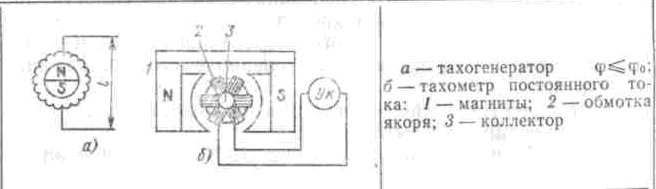
Электрические тахогенераторы постоянного и переменного тока:
Основаны на зависимости генерируемого напряжения от частоты вращения вала.
Магнитоиндукционные тахометры
Основаны на измерении сил, возникающих в результате взаимодействия вращающегося магнитного поля с индукционными токами, наведеными этим полем в сплошном металлическом роторе.
Постоянныймагнит выполняют многополосным, а цилиндр выполняют в виде диска.
Если тахометр соединить с эд. Дистанционным передатчиком, то получим дистанционный тахометр.
На ВС ГА применяют 2 типа тахометров:
ТЭ со шкалой отградуированной в об/мин (поршневые АД);
ИТЭ со шкалой в %, рабочий диапазон шкалы составляет 60-110%. Погрешность в рабочей части шкалы при условиях ±0,5%, в остальной части шкалы – не более ±1,0%.
Топливомеры: поплавковые, емкостные, принцип построения, основные характеристики.
Топливомеры – приборы, определяющие объемное или весовое количество топлива в баках.
Топливомеры Определяют суммарный запас топлива во всех баках и количество топлива в каждом из них. Переключение баков при расходовании топлива – автоматически.
Поплавковые топливомеры Состоит из датчика, расположенного в топливном баке и указателя на приборной доске. При наличии нескольких топливных баков путем переключения электрических цепей один и тот же указатель подсоединяется к каждому датчику или одновременно ко всем датчикам, соединенным последовательно, т.е. измерять запас топлива в каждом баке в отдельности или суммарный запас топлива. Указатель топливомера – логометр, рамки которого включены в мостовую схему: Форма бака Для учета влияния формы бака на определение суммарного количества топлива по его уровню в баке находится потенциометр, который выдает сигнал профилируемый применительно к форме каждого бака. Погрешность поплавковых топливомеров
обусловленные изменением положения уровня топлива в баке при продольных и поперечных наклонах самолета и ускорениями движения самолета; влияние температуры на уровень топлива (коэффициент объемного расширения топлива); инструментальные погрешности (силы трения, люфты, влияния температуры на механические, электрические, магнитные свойства деталей и узлов топливомера). Емкосные топливомеры Состоят из датчика (в топливном баке) и указателя (на приборной доске) + блок усиления и коммутации. Датчик – конденсатор в виде коаксиальных цилиндров (труб) вертикально по всей высоте бака.Величина емкости между электродами (трубами):
С = С1 + С2.||С1 – емкость нижней части конденсатора, заполненой топливом; С2 – емкость верхней части конденсатора (воздух или пары топлива).
Отношение
наибольшей емкости к начальной:

Cm/C0 =Et/E0 т.е. εТ=2; εВ=1, то Для увеличения емкости используют несколько коаксиальных цилиндров (до шести), которые через один соединяют попарно, что не влияет на соотношение Cm/C0 , ведет лишь к увеличению абсолютной величины С0 и Cm.
При изменении емкости СХ нарушается равновесие моста и сигнал рассогласования через усилитель УС – поступают на двигатель, который отрабатывает стрелку указателя и щетку потенциометра R до равновесия положения моста, r1 и r2 – применяют для установки стрелки указателя на крайнее деление шкалы при пустом и полном баках. Для устранения влияния кренов и тангажа самолета на показания топливомера в один бак устанавливают несколько датчиков, измерения производят по среднему значению сигналов двух датчиков.Для измерения суммарного запаса топлива в нескольких баках вместо одного датчика в схему на место емкости Сх подключаются параллельно все датчики и вводится другая величина С0.
Погрешность емкосных топливомеров вызываются главным образом влиянием температур на параметры элементов мостовой схемы (конденсаторов, сопротивления).