

Заключение
В данном уроке вы изучили как выводить 3d геометрию на экран и познакомились с шейдерами, которые нужны для её отображения. В следующем уроке мы познакомимся уустановкой камеры, но сначала мы немного погрузимся в обширный мир 3d математики, и вплотную столкнемся с матрицами.
Урок 3. Математические основы Direct3d
Прежде чем приступать к дальнейшему изучению DirectX необходимо ознакомится с тем, какими данными мы будем в дальнейшем оперировать. Конечно, вы уже знаете что одна вершина модели характеризуется тремся координатами XYZ, однако для того чтобы работать в DirectX этого недостаточно.
Знакомство с базовыми 3d представлениями данных
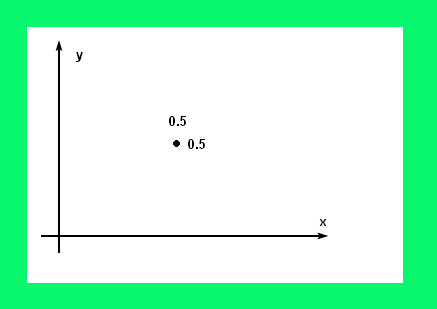
Расстояние от начала координатной системы и положение точки в пространстве называется координатой.
Отрезок произвольной длинны, называется вектором. Вектор может быть представлен двумя способами:
Заданием компонент вектора.
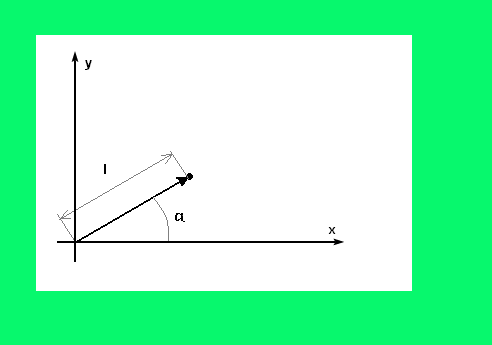
Заданием направления и модуля вектора.
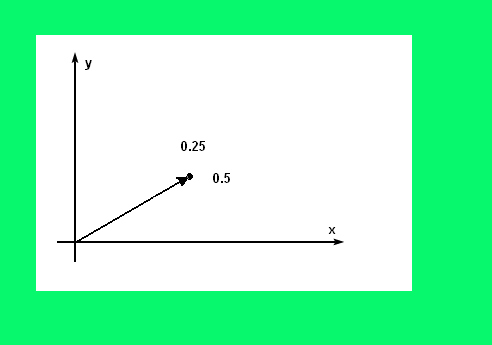
Компонентами вектора A называются длины проекций этого вектора на каждую из осей координат.
Если вкратце, то компоненты вектора – это просто координаты конечной точки вектора. Задание трехмерного вектора в виде компонент математически выглядит как:
![]()
Модулем вектора A называется длинна вектора, она равна по абсолютной величине квадратному корню из суммы квадратов компонент вектора. Любой вектор характеризуется направлением, которое задается одним или более углов между выбранными осями координат (ортами) и модулем этого вектора.
Теперь рассмотрим третий ключевое понятие DirectX – Матрицы. Матрицей называется объект, состоящий из наборов чисел, сгруппированных в столбцы и строки. В основном в DirectX используются четырехрядные матрицы:

Преобразования векторов и операции с ними
Вектора, можно рассматривать как обычные числа, ведь одной переменной можно присвоить целый вектор:
![]()
Математические операции с векторами
Так как теперь вектор является своего рода числом, то с ним можно осуществлять различные математические опреции, а именно:
Сложение векторов
Вычитание векторов
Умножение векторов
Деление вектора на число
Математически это выглядит следующим образом:
![]()
Модуль вектора
Модулем вектора называется длинна вектора, она равна по абсолютной величине квадратному корню из суммы квадратов компонент вектора.
![]()
Скалярное и векторное умножении векторов
Умножение векторов отличается от умножения обычных чисел. Во первых, существует два вида умножения векторов: скалярное и векторное.
Результатом скалярного умножения векторов является число, равное косинусу угла между векторами (этот угол определен в плоскости, на которой лежат эти вектора) умноженному на произведение модулей этих векторов:
![]()
Результатом векторного умножения вектокторов является вектор,
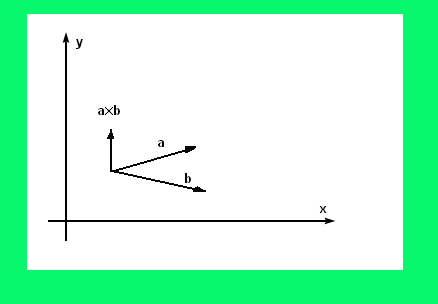
перпедникулярныйобеим
исходным векторам, то есть перпендикулярной
плоскости, в которой лежат эти вектора,
этот вектор по модулю равен синусу угла
между векторами умноженному на
произведение модулей этих векторов.
![]()
![]()
Норма вектора
Нормой вектора называется модуль вектора.