

Тема 2. Основы теории трактора и автомобиля
Лекция1. Основы теорииавтомобиля
Силы, действующие на транспортные машины
При движении на колеса транспортной машины действуют реакции - нормальные и параллельные опорной поверхности.
Внешние силы, действующие на машину, можно подразделить, на:
- силы, приводящие машину в движение (движущие), действующие по направлению движения;
- силы полезных сопротивлений, т. е. силы для преодоления которых, и устроена данная машина (сопротивление движению; сопротивление веса поднимаемого груза и т.д.);
- силы вредных сопротивлений, т. е. силы, сопротивление которых возникает при относительном движении частей машины. Работа этих сил всегда отрицательна (силы трения);
- сопротивление среды (воздуха, воды, почвы и т. п.);
- сопротивление сил тяжести. Работа сил тяжести машины будет иметь то отрицательное, то положительное значение. Но работа этих сил за полный период движения будет равна нулю.
Уравнения равновесия сил действующие на транспортную машину

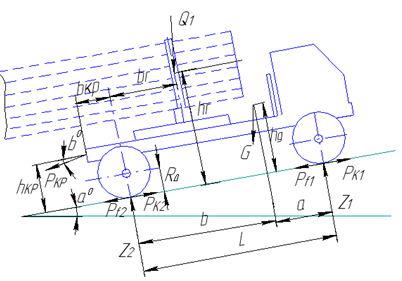
Рисунок 1- Схема сил действующих на двухосный автомобиль
Два из этих уравнений представляет собой равенство нулю алгебраической суммы проекций всех сил, действующих на транспортную машину на две произвольные координатные оси, а последнее уравнение выражает равенство нулю суммы моментов всех сил относительно произвольно выбранной точки.
Уравнение тягового баланса машины
 ,
,
где
 -
касательная сила тяги на ведущих колесах
машины;
-
касательная сила тяги на ведущих колесах
машины;
 -
сила сопротивления качению;
-
сила сопротивления качению;
 -
сила сопротивления подъему;
-
сила сопротивления подъему;
 -
сила инерции с учетом инерции вращающихся
масс;
-
сила инерции с учетом инерции вращающихся
масс;
 -
сила сопротивления воздуха.
-
сила сопротивления воздуха.
Касательная сила тяги на ведущих колесах машины, кН
 ,
,
где
 - максимальный крутящий момент на
ведущих колесах
- максимальный крутящий момент на
ведущих колесах
машины;
 -
радиус ведущих колес машины.
-
радиус ведущих колес машины.
Сила сопротивления качению
 ,
,
где
 - общий вес машины;
- общий вес машины;
- коэффициент сопротивления качению машины;
- угол подъем преодолеваемый машиной.
Сила сопротивления подъему

При равномерном движении машины сила инерции равна нулю, т.е.
= 0;
Сила сопротивления воздуха
 ,
,
где К - коэффициент обтекаемости машины;
F - площадь лобовой поверхности машины;
V - скорость движения машины.
Нормальные реакции дороги на колеса трактора и автомобиля
В продольной плоскости на трактор действуют:
- вес трактора , приложеный в центре тяжести с координатами и ;
-
нормальные реакции дороги
 и
и
 ;
;
- реакции дороги, параллельные поверхности пути;
-
тяговые сопротивления

 ;
;
-
суммарная сила инерции
 поступательно движущихся масс.
поступательно движущихся масс.
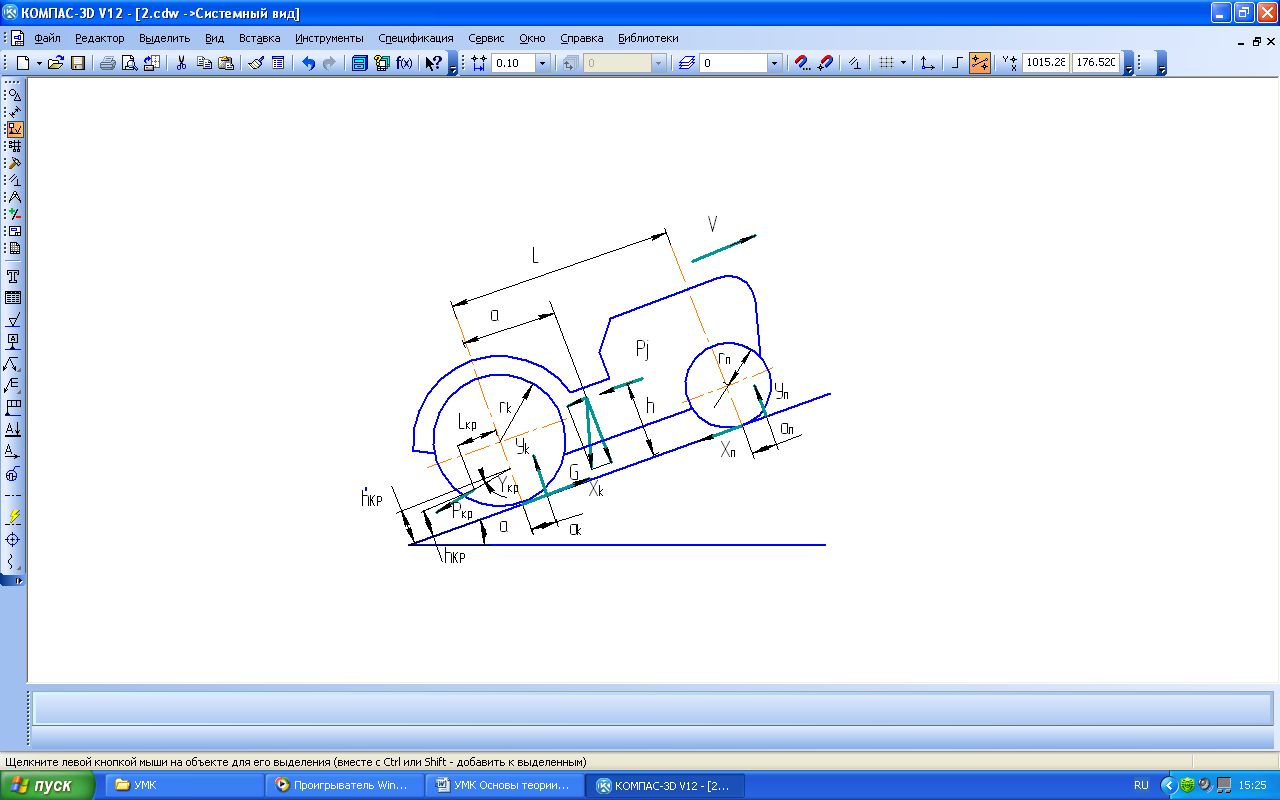
Рисунок 2- Внешние силы, действующие на трактор в продольной плоскости
Для
определения
 ,
действующие на передние колеса составим
уравнение моментов сил
,
действующие на передние колеса составим
уравнение моментов сил
 :
:
 ,
,
где
 - продольная база трактора.
- продольная база трактора.
Так
как ;
;
 ;
;
 ,
,
 .
.
Принимаем
 .
.
Для
определения
найдем
 .
.

или
 .
.
При установившемся движении:
 ;
;
 .
.
Значение статических реакций:
 ;
;
 .
.
Значения реакций и в процессе движения непостоянны. Изменение и происходит в результате перераспределения нормальных нагрузок между передними и задними колесами.
Снижение нагрузки на передние колеса вызывает увеличение нагрузки на задние и наоборот, но всегда:
 .
.
Значения этих реакций оказывает влияние на:
- тяговые и тормозные качества машины;
- продольную устойчивость и управляемость;
- нагрузки, воспринимаемые ее узлами и деталями.
При
определении нормальных реакций
и
для автомобилей необходимо учитывать
сопротивления воздуха
 .
.
Для наглядного представления о распределении нормальных реакций между передними и задними колесами вводится понятие коэффициента нагрузки передних и задних колес:
 -
характеризует управляемость машины.
-
характеризует управляемость машины.
 -
характеризует
сцепной вес.
-
характеризует
сцепной вес.
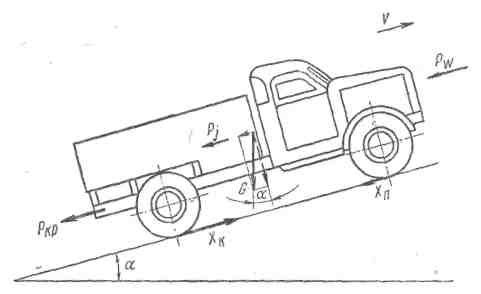
Рисунок 3- Схема сил действующих на автомобиль в продольной
плоскости
При статическом положении:
 ;
;

На распределение нагрузки существенное значение оказывает продольная координата тяжести машины. У колесных машин центр тяжести располагается ближе к задним колесам:
 .
.
Кинематика и динамика ведомого и ведущего колеса
Качение жесткого колеса по деформированной поверхности
При движении, на колесо действуют силы:
- вертикальная сила;
- сила, действующая со стороны остова автомобиля.

Рисунок 4- Схема сил, действующих на ведомое колесо с жестким ободом при движении по деформирующейся поверхности
Под действием этих сил колесо вдавливается в грунт и образуется колея, в результате возникают нормальные и касательные реакции почвы.
Касательные реакции являются силами трения между ободом колеса и почвой. Так как левый участок обода автомобиля не соприкасается с грунтом, равнодействующая реакций грунта смещена с вертикальной оси в право и вынесена на расстояние а.
Точка С – мгновенный центр давления колеса на грунт.
Смещение точки С приводит к возникновению момента сопротивлению качению:
 .
.
На
колесо действует пара сил, образуемая
силой
толкающей колесо и
 (реакцией почвы).
(реакцией почвы).
Для
равномерного вращения момент пары сил
и
должен
равен моменту сопротивления качению
колеса
 ,
то есть:
,
то есть:
 ,
,
откуда
 ,
,
Или
 .
.
 -
коэффициент сопротивления качению.
-
коэффициент сопротивления качению.
 ,
,
где - определяется экспериментально.
Физический смысл качения ведомого колеса:
- сила , толкающая ось колеса, стремиться двигать его вперед;
- этому мешает горизонтальная реакция грунта ;
-
под воздействием моментов
 происходит равномерное качение
происходит равномерное качение
колеса.
- колесо подминает под себя грунт.
Вертикальная
деформация грунта происходит под
действием веса
 ,
горизонтальная – под действием толкающей
силы
.
В результате горизонтальной деформации
грунта путь ведомого колеса за один
оборот оказывается больше, чем длина
окружности обода.
,
горизонтальная – под действием толкающей
силы
.
В результате горизонтальной деформации
грунта путь ведомого колеса за один
оборот оказывается больше, чем длина
окружности обода.
Качение эластичного колеса по жесткой поверхности
В передней половине площади контакта шины с дорогой нормальные реакции больше, чем в задней. Поэтому равнодействующая нормальных реакции сдвигается вперед от вертикали на величину а.

Рисунок 5 - Схема сил, действующих на ведомое колесо с эластичной шиной при установившемся движении по горизонтальной недеформирующейся поверхности.
Реакция создает момент сопротивления качению
 .
.
Сила
 стремиться сдвинуть ось колеса вперед,
этому мешает сила трения
(сцепления).
стремиться сдвинуть ось колеса вперед,
этому мешает сила трения
(сцепления).
Вращающий момент создается парой сил, образующей силой и .
Ведущее колесо
Силы, действующие на колесо:
 -
ведущий момент;
-
ведущий момент;
- вес на колесо;
 -
реактивная сила;
-
реактивная сила;
 -
реакции почвы.
-
реакции почвы.
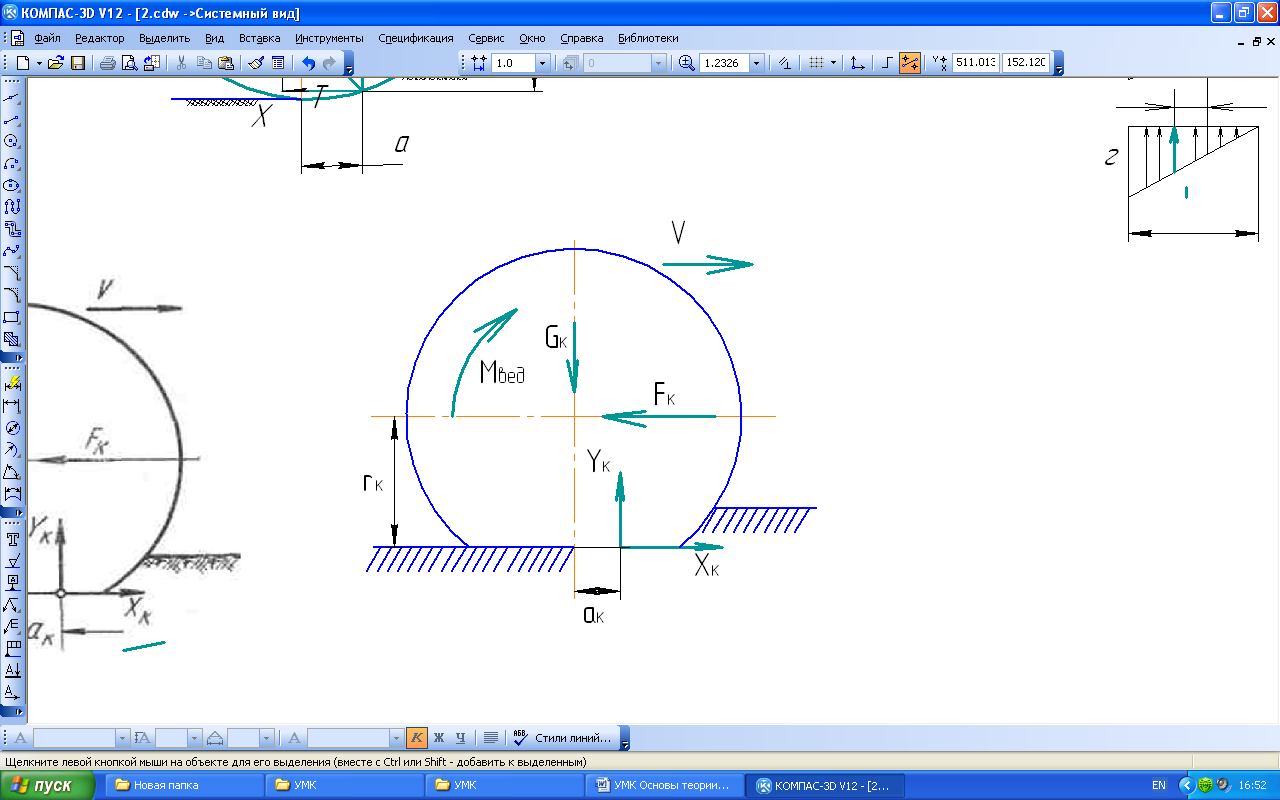
Рисунок 6 - Схема сил и моментов, действующих на ведущее колесо с эластичной шиной при установившемся движении по горизонтальной деформирующейся поверхности
Момент сопротивления качению колеса

где
 - динамический радиус.
- динамический радиус.
Толкающая
реакция почвы -
 равна
сопротивлению остова
равна
сопротивлению остова
Баланс мощностей:
 ,
,
где
 - угловая скорость колеса.
- угловая скорость колеса.
При условии если колесо катится без буксования и не имела деформаций, то:
 -
теоретическая поступательная скорость
колеса.
-
теоретическая поступательная скорость
колеса.
Истинная поступательная скорость ведущего колеса меньше теоретической:
 ,
,
где - действительный радиус качения колеса.
Коэффициент полезного действия (К.П.Д.) ведущего колеса
Из-за потерь на качение и буксование мощность, передаваемая ведущим колесом остову, меньше мощности, подводимой к колесу, поэтому:
 ,
так как из
,
так как из
 .
.
Следовательно
 ,
,
где К.П.Д., учитывающий потери на качение колеса,

К.П.Д., учитывающий потери на буксование;

Тогда
 .
.
Деформация шины в процессе движения
Под действием внешних нагрузок Р шины подвергается деформациям:
- радиальная (нормальная);
- окружная (тангенциальная);
- поперечная (боковая);
- угловая.
Нормальная
деформация
не оказывает влияние на давление воздуха
в шине и характеризуется коэффициентом
жесткости шины в нормальном направлении.

 ,
кгс/мм,
,
кгс/мм,
- коэффициент жесткости шины в нормальном направлении.
Коэффициент жесткости шины в нормальном направлении зависит от:
- давления в шине;
- размеров колеса;
- конструкции и материала.
Окружная (тангенциальная) деформация значительно меньше, чем нормальная, сопутствуют ей и возникают одновременно.
Окружная (тангенциальная) вызывается действием на колесо крутящих моментов (окружных сил).
Тангенциальная жесткость шины
 ,
,
где
 - угол закрутки шины.
- угол закрутки шины.
Боковая
сила
 вызывает искажение профиля. Шины и
изменение формы ее контакта с дорогой.
Деформация вызывает боковой увод шины.
вызывает искажение профиля. Шины и
изменение формы ее контакта с дорогой.
Деформация вызывает боковой увод шины.
Коэффициент сопротивления боковому увода, кг/град.

где - угол бокового увода.
Угловая деформация возникает, если приложен момент М, параллельный поверхности пути.
Коэффициент угловой жесткости шины.

Радиусы шины
Свободный
 - радиус ненагружного колеса.
- радиус ненагружного колеса.
Статический
 - расстояние от оси неподвижного колеса
до плоскости его опоры.
- расстояние от оси неподвижного колеса
до плоскости его опоры.
Динамический радиус - расстояние от оси колеса до результирующей продольных реакций почвы, действующей на колесо.
Кинематический радиус – фиктивного колеса вращается без скольжения и буксования и имеет поступательную скорость, которую имеет колесо. Кинематический радиус определяет путь пройденный колесом за один оборот.
Динамика колесных машин
Касательная сила тяги и толкающая реакция дороги
Перемещение машины вызывает касательные реакции дороги, которые возникают между опорой поверхностью дороги и движителем (ведущие колеса или гусеницы), когда к нему подведен крутящий момент.
Из мощностного баланса ведущего колеса касательная реакция грунта равна:
 ,
,
 ,
,
где
 - окружная сила на ободе ведущего колеса
(полная касательная
- окружная сила на ободе ведущего колеса
(полная касательная
сила
тяги по двигателю),
 ;
;
 -
крутящий момент на ведущем колесе;
-
крутящий момент на ведущем колесе;
 ,
,
где - крутящий момент двигателя;
 -
передаточное число трансмиссии;
-
передаточное число трансмиссии;
 ;
;
Трансмиссия увеличивает крутящий момент двигателя в 50 и более раз;
Коэффициент
полезного действия трансмиссии
 зависит от:
зависит от:
- числа пар зубчатых колес, находящихся в зацеплении;
- типа шестерен;
- температуры, вязкости и уровня масла.
 ;
;
 -
момент касательных сил инерции колес
и деталей трансмиссии и двигателя.
-
момент касательных сил инерции колес
и деталей трансмиссии и двигателя.
В
зависимости от знака
 имеет знак «+» или «-»;
имеет знак «+» или «-»;
 -
сила сопротивления ведущего колеса;
-
сила сопротивления ведущего колеса;
 .
.
Касательная реакция (толкающая реакция) равна:
 .
.
равна реакции рамы.
Если
 наступает проскальзывание движения,
сдвиг и срез грунта, то есть - явление
буксования
наступает проскальзывание движения,
сдвиг и срез грунта, то есть - явление
буксования
 .
.
Таким
образом сила тяги
 ,
может быть реализована только при
соответствующем сцеплении колес и
гусениц с опорной поверхностью.
,
может быть реализована только при
соответствующем сцеплении колес и
гусениц с опорной поверхностью.
Сила сопротивления подъему
Сила
сопротивления подъему
 возникает при преодолении машиной
подъемов дороги. Крутизну подъема дороги
характеризуют величиной угла
или величиной угла
возникает при преодолении машиной
подъемов дороги. Крутизну подъема дороги
характеризуют величиной угла
или величиной угла

 .
.
 .
.
При
 .
.
 .
.
При движении на подъем положительна, на спуск – отрицательна.
Автомобили эксплуатируются на дорогах - ; трактора - .
Сила сопротивления дороги
Величина и характеризуют качество дороги, определяя силу сопротивления дороги:
 ;
;
 -
коэффициент сопротивления дороги.
-
коэффициент сопротивления дороги.
Значение силы сопротивления дороги от полного веса.
Автомобиль:
 - по грунтовой дороге;
- по грунтовой дороге;
 -
в распутицу.
-
в распутицу.
Трактора:
 .
.
Сила сопротивления воздушной среды
 ,
,
где
 - коэффициент обтекаемости воздушной
среды;
- коэффициент обтекаемости воздушной
среды;
 ;
;
- лобовая площадь автомобиля.
До
скорости
 км/час,
сила сопротивления воздушной среды
не учитывается.
км/час,
сила сопротивления воздушной среды
не учитывается.
Сила сопротивления инерции
Сила инерции возникает в процессе разгона масс, совершающих поступательное и вращательное движение, кг
 ,
,
где
 -
сила тяги, затрачиваемая на преодоление
сил инерции
-
сила тяги, затрачиваемая на преодоление
сил инерции
поступательно движущихся масс;
 -
сила тяги, затрачиваемая на преодоление
сил инерции
-
сила тяги, затрачиваемая на преодоление
сил инерции
вращающихся масс.
 ,
,
где - вес автомобиля;
 -
ускорение силы тяги;
-
ускорение силы тяги;
 -
ускорение автомобиля.
-
ускорение автомобиля.
Для
учета влияния вращающихся масс на силу
инерции машины вводят коэффициент учета
вращающихся масс
( );
);
Для автомобиля

Для гусеничного трактора

Тогда
 .
.
Сила сопротивления движению прицепа
Данная сила называется сила тяги на крюке , сила необходимая для буксировки прицепа равна сумме всех сопротивлений его перемещению:

или
 .
.
Тяговый баланс и дифференциальное уравнение движения
Если все силы действующие на автомобиль спроектировать на плоскость движения, получим:
 .
.
Сила сопротивления качению и сила сопротивления подъему определим как общее сопротивление дороге:
 ,
,
где
 - приведенный коэффициент сопротивления
дороги;
- приведенный коэффициент сопротивления
дороги;
- сила сопротивления от инерции поступательно движущихся пар,
а
с учетом вращательных пара
 ,
тогда уравнение тягового баланса имеет
вид:
,
тогда уравнение тягового баланса имеет
вид:

В теории автомобиля используют дифференциальное уравнение движения:
 ,
,
где
 - сумма внешних сопротивлений;
- сумма внешних сопротивлений;
- касательная сила тяги.
Если
 ,
автомобиль движется ускоренно.
,
автомобиль движется ускоренно.
Если
 - движение замедленно.
- движение замедленно.
Свободной
силы тяги
 называется:
называется:
 .
.
может использоваться для преодоления сил сопротивления качению, подъему, буксования и разгона автомобиля.
Мощностной баланс автомобиля
Производительность трактора или автомобиля зависит от грузоподъемности и скорости движения. Увеличение скорости движения машины требует повышения мощности двигателя, что приводит к увеличению расхода топлива. При одинаковой грузоподъемности мощные автомобили и трактора дороже тихоходных машин. Поэтому, для каждого типа машин существует предел энергонасыщенности, превышение которого ведет к удорожанию транспортных машин.
Мощность двигателя расходуется:
- на деформацию грунта и шин весом автомобиля :
 ;
;
- на мощность, затрачиваемую на преодоление силы сопротивления подъему:
 ;
;
- на мощность, необходимую для преодоления силы сопротивления воздушной среды:
 ;
;
- на мощность, расходуемую на деформацию сдвига грунта или буксования:
 ;
;
- на мощность, затрачиваемую на разгон автомобиля и раскручивания вращающихся масс:
 ;
;
- на мощность, затрачиваемую на преодоление механических потерь в трансмиссии и гусеничном двигателе:
 ;
;
- на мощность, развивающуюся на крюке:
 .
.
Сумма составляющих равняется мощности двигателя. Уравнение мощностного баланса имеет вид:
 .
.
В
случае установившегося движения, когда
 мало:
мало:
 .
.
При движении по дороге, где буксованием колеса можно пренебречь:
 .
.
Для трелевочных тракторов:
 .
.
Тяговая динамика колесных машин
Динамический фактор и динамические характеристики
Из
тягового баланса автомобиля
 имеем:
имеем:
 ,
,
Откуда
 есть сила тяги, требуемая для преодоления
всех внешних сопротивлений движению
автомобиля, за исключением сопротивления
воздуха. Она пропорциональна весу
автомобиля.
есть сила тяги, требуемая для преодоления
всех внешних сопротивлений движению
автомобиля, за исключением сопротивления
воздуха. Она пропорциональна весу
автомобиля.
Поэтому
 характеризует запас силы тяги, приходящуюся
на единицу веса автомобиля и служит
измерителем его динамических качеств.
характеризует запас силы тяги, приходящуюся
на единицу веса автомобиля и служит
измерителем его динамических качеств.
Принято
 ,
,
где
 - динамический фактор.
- динамический фактор.
 ,
,
так
как
 ;
;
 .
.
- крутящий момент двигателя, берут поскоростной характеристики, снятой при полном открытии дроссельной заслонки.
Динамический фактор зависит от скорости движения автомобиля, частоты вращения коленного вала и номера передачи КПП.
Так как динамический фактор удельный параметр, он позволяет проводить сравнительную оценку динамических качеств различных автомобилей независимо от их грузоподъемности и веса.
Для
наглядного представления динамического
фактора
при работе автомобиля с различными
скоростями на разных передачах строят
график
 ,
называемый динамической характеристикой
автомобиля.
,
называемый динамической характеристикой
автомобиля.
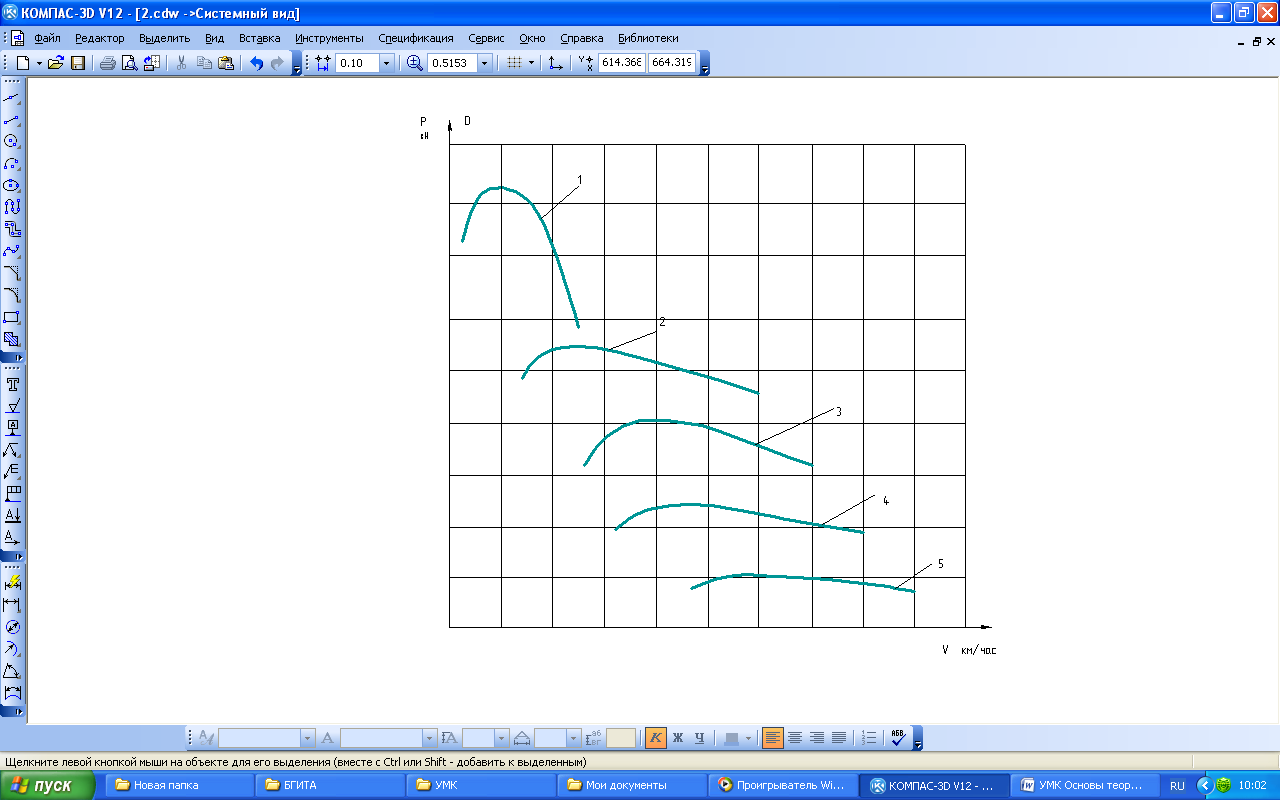
Рисунок 7 – Динамическая характеристика автомобиля
 -
I
передача;
-
I
передача;
 -
4 передача;
-
4 передача;
1,2,… - номера передач.
С левой стороны кривые ограничены минимальной частотой вращения двигателя, с правой – допустимой максимальной частотой вращения.
Построение графика между автомобиля и частотой вращения двигателя есть зависимость:
 .
.
Используя его, определяем скорость вращения двигателя при различных скоростях автомобиля. Затем по скоростной характеристике находим значение , соответствующие этим частотам, а дальше значение по формуле.
При помощи характеристики решают задачи, возникающие при эксплуатации автомобиля.
1. Возможная скорость движения.
Требуется определить передачу автомобиля и максимальную скорость движения в заданных дорожных условиях, характеризующие (приведенный коэффициент дорожных сопротивлений):
 .
.
2. Определить наибольшее дорожное сопротивление, преодолеваемое автомобилем, двигаясь на передаче с равномерной скоростью.
3. Определить величину угла подъема, которые автомобиль способен преодолеть в заданных дорожных условиях на разных передачах и скоростью:
 ,
поэтому
,
поэтому
 .
.
4. Ускорение автомобиля.
Для определения ускорения автомобиля при заданной скорости движения и заданном сопротивлении движению пользуются формулой:
 ,
,
из
 .
.
Условие ускоренного движения является наличие запаса .
 .
.
В справочные данные по автомобилю включаются следующие показатели, определяемые из динамической характеристики:
- максимальная скорость при установившемся движении в наиболее типичных дорожных условиях;
-
динамический фактор напрямой передачи
на номинальной скорости движения
 ;
;
- максимальное значение динамического фактора на прямой передаче и соответствующее ему значение;
- максимальное значение динамического фактора на низшей передаче;
-
значение динамического фактора на промежуточных передачах.
на промежуточных передачах.
Разгон автомобиля
Важнейшим динамическим фактором автомобиля является приемистость, то есть способность к быстрому разгону, который характеризуется:
величиной ускорения j автомобиля в процессе разгона;
продолжительность разгона
 ;
;путь разгона
 ,
проходимый автомобилем за время разгона.
,
проходимый автомобилем за время разгона.
Величину
ускорения разгона определили раньше,
она зависит от разности
 и от
и от .
.
- сопротивление, оказываемое разгону вращающимися массами автомобиля.
Время разгона из выражения определяется: ;
 .
.
Путь
разгона
 .
.
Грузовые
автомобили от 0 до 50 км/час;
 сек,
сек,
 м.
м.
Легковые
автомобили -
 сек,
сек,
 м.
м.
Тяговый расчет автомобиля
Задачи и содержание тягового расчета
Тяговые расчеты выполняются при проектировании новых и модернизации существующих машин с целью определения основных технических параметров для определения эксплуатационных показателей машин. Кроме этого тяговый расчет используется для технико-экономического обоснования оптимальных параметров лесосечных и лесотранспортных машин.
Предварительно задаются полный вес автомобиля, выбирается тип двигателя и трансмиссии.
Методика тягового расчета
зная нагрузку на ось, с учетом требований к проходимости выбирают тип и размеры шин;
определяют лобовую поверхность автопоезда, задают коэффициент обтекаемости;
задают величину коэффициента К.П.Д. трансмиссии
 ;
;определяют номинальную мощность двигателя, и по расчетной мощности выбирают наиболее подходящий серийный двигатель;
уточняют максимальную скорость автомобиля, ориентируясь на фактическую мощность двигателя;
определяют передаточное число трансмиссии;
зная и строят кривую
 тяговую характеристику:
тяговую характеристику:
 ;
;
 .
.
Выбор передаточных чисел трансмиссии
1. Первоначально выбирают схему трансмиссии исходя из типа автомобиля. Выбирают колесную формулу автомобиля и определяют какие механизмы входят в состав трансмиссии.
 ,
,
где
 - передаточное число главной передачи;
- передаточное число главной передачи;
 -
передаточное число коробки передач на
первой передачи;
-
передаточное число коробки передач на
первой передачи;
 -
передаточное число раздаточной коробки;
-
передаточное число раздаточной коробки;
 -
передаточное число конечной передачи.
-
передаточное число конечной передачи.
2. Определение передаточного числа главной передачи.
 ,
,
где - радиус качения ведущего колеса;
 -
КПП на высшей передачи;
-
КПП на высшей передачи;
- передаточное число раздаточной коробки;
 -
скорость движения автомобиля на высшей
передачи;
-
скорость движения автомобиля на высшей
передачи;
 -
частота вращения коленчатого вала.
-
частота вращения коленчатого вала.
Передаточного
числа главной передачи
 определяют исходя из максимальной
скорости автомобиля на высшей передачи.
определяют исходя из максимальной
скорости автомобиля на высшей передачи.
3. Определение передаточного числа коробки передач.
Передаточного
числа коробки передач
 определяют исходя из максимального
дорожного сопротивления
или исходя из максимального динамического
фактора на первой передачи.
определяют исходя из максимального
дорожного сопротивления
или исходя из максимального динамического
фактора на первой передачи.
Максимальный
динамический фактор на первой передачи
определяется по сцепным возможностям
автомобиля. Для реализации сцепных
качеств автомобиля динамический фактор
должен быть больше или равен
 или по сцеплению
или по сцеплению
 .
.
 ,
,
где
- коэффициент сцепления;
 ;
;
 -
коэффициент нагрузки ведущих колес.
-
коэффициент нагрузки ведущих колес.
 ,
,
где
 - масса груженого автомобиля;
- масса груженого автомобиля;
 -
максимальный крутящий момент двигателя.
-
максимальный крутящий момент двигателя.
Структура ряда передач выбирается из условия обеспечения наибольшей интенсивности разгона и строится по принципу геометрической прогрессии, знаменатель прогрессии:
 ,
,
где
 - число ступеней в коробке передач.
- число ступеней в коробке передач.
После этого разрабатывается кинетическая схема проектируемой коробки.
Тяговая динамика автомобиля с гидромеханической трансмиссией
В место механических ступенчатых коробок передач трансмиссии автомобилей иногда снабжаются гидромеханическими передачами, состоящие из гидродинамического преобразователя крутящего момента и работающего в сочетании с ним шестеренчатого редуктора.
Гидродинамическая передача состоит из центробежного насоса и гидравлической турбины. Колесо насоса соединено с коленчатым валом двигателя, и колесо турбины с ведущими органами машины. Механическая энергия двигателя на лопастях насосного колеса преобразуется в гидравлическую энергию жидкости, поток которой направляется в турбину. Здесь энергия жидкости преобразуется в механическую энергию вращения турбинного колеса.
На транспортных машинах применяются гидравлические муфты (ГМ) и гидротрансформаторы (ГТ).
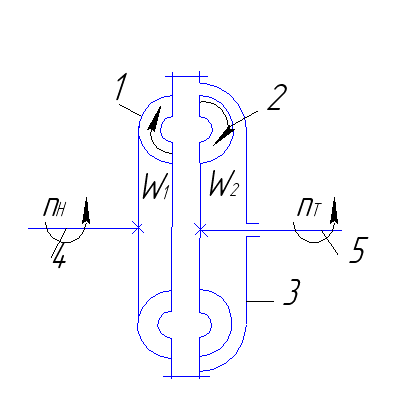
1- насосное колесо; 2 – турбиное колесо; 3-корпус; 4-вал двигателя;
5-ведомый вал
Рисунок 8 - Схема гидромуфты
В
ГМ действие жидкости происходит
непосредственно между насосным и
турбинным колесами. При установившемся
движении
 .
.
При работе ГМ между насосным и турбинным колесами возникает скольжение. Центробежные силы создают сопротивление движению жидкости, что приводит к отставанию турбины.
 .
.
Коэффициент
полезного действия гидромуфты К.П.Д.
 .
.
Зависимость
между
и


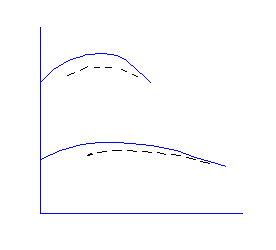
__________ - с ГМ
--------- без ГМ
Рисунок 8- Тяговая характеристика автомобиля с ГМ
 ,
,
где - коэффициент входного момента насоса;
- удельный вес жидкости;
 -
число оборотов насоса;
-
число оборотов насоса;
- диаметр по лопаткам.
Установка ГМ в механическую трансмиссию позволяет:
- повышать проходимость машин, так как вследствие скольжения допускает при малых скоростях получить значительную силу тяги на ведущих колесах;
- обеспечить устойчивую работу двигателя независимо от нагрузки и оборотов;
- дает возможность более плавно трогаться с места и возможность интенсивного разгона машины;
- предохранять агрегаты трансмиссии от динамических перегрузок и гасить крутильные колебания;
- упростить управление машиной, допуская длительную пробуксовку при постоянном крутящем моменте двигателя.
Недостатки: потеря мощности на скольжении и отсутствие чистого отключения (требуется сохранение в трансмиссии фракционной муфты сцепления).
Гидротрансформаторы
Гидротрансформаторыпреобразуют момент, передаваемый от насоса к турбине.
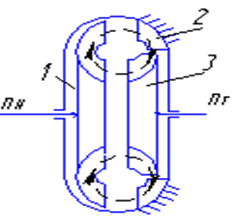
Рисунок 9 - Схема гидротрансформатора
Насосное колесо 1 , жестко соединено с валом двигателя, приводит жидкость в движение, направляя ее на колесо реактора 2 и далее на лопатки турбины. Реакторное колесо, установленное жестко, отклоняет поток жидкости, изменяет скорость ее движения, что приводит к возникновению реактивного момента.
В результате возникновения реактивного момента в реакторе произойдет изменение количества движения потока жидкости, вследствие этого момент турбины:
(основное уравнение гидротрансформатора).
Возникновение
 связано с тем, что лопатки неподвижного
реактора изменяют направление потока
масла при его возвращении из турбины в
насос. Подбором формы лопасти реактора
добиваются, чтобы момент на валу турбины
был больше момента насоса.
связано с тем, что лопатки неподвижного
реактора изменяют направление потока
масла при его возвращении из турбины в
насос. Подбором формы лопасти реактора
добиваются, чтобы момент на валу турбины
был больше момента насоса.
Преобразующее действие ГТ характеризуется коэффициентом трансформации (силовым передаточным числом)

Величина
 зависит от условий работы автомобиля,
и происходит это автоматически, без
вмешательства со стороны водителя. С
увеличением внешнего сопротивления
движению частота вращения турбины
снижается, что приводит к увеличению
коэффициента трансформации.
зависит от условий работы автомобиля,
и происходит это автоматически, без
вмешательства со стороны водителя. С
увеличением внешнего сопротивления
движению частота вращения турбины
снижается, что приводит к увеличению
коэффициента трансформации. -
когда вал турбины полностью заторможен.
-
когда вал турбины полностью заторможен.
Кинематическое сопротивление в ГТ характеризуют передаточным отношением, то есть величиной обратной передаточному числу

Передаточное число гидротрансформатора
ГТ
 .
.
Увеличение
момента будет тем больше, чем меньше
отношение
 .
.
Для
ГТ строится (по опытным данным) безразмерная
характеристика с зависимостями
 в функции от
в функции от .
.
и
 - коэффициенты изменения момента насоса
и турбины.
- коэффициенты изменения момента насоса
и турбины.
В
зависимости от характера кривой
 ,
ГТ разделяют на непрозрачные и прозрачные.
,
ГТ разделяют на непрозрачные и прозрачные.
Непрозрачные
ГТ имеют колебания
 ,
то есть насос и двигатель работают при
постоянных оборотах, независимо от
нагрузки на турбине, то есть приспособляемость
двигателя не используется
,
то есть насос и двигатель работают при
постоянных оборотах, независимо от
нагрузки на турбине, то есть приспособляемость
двигателя не используется
 .
.
В прозрачных ГТ заметно изменяется в зависимости от . Они не изолируют двигатель от нагрузки на валу турбины, что позволяет для
преодоления
возросших сопротивлений использовать
и крутящий момент двигателя,
 .
.
Чтобы меньше загружать ГТ на невыгодных режимах его переводят на режим ГМ, им блокируют (вал насоса соединяют в одно целое с валом турбины).
ГТ различают по числу колес насоса, реактора, турбины, по их расположению, геометрической форме, по направлению потока жидкости.
ГТ установленный в трансмиссию, выполняет функции муфты сцепления и частично заменяет коробку передач.
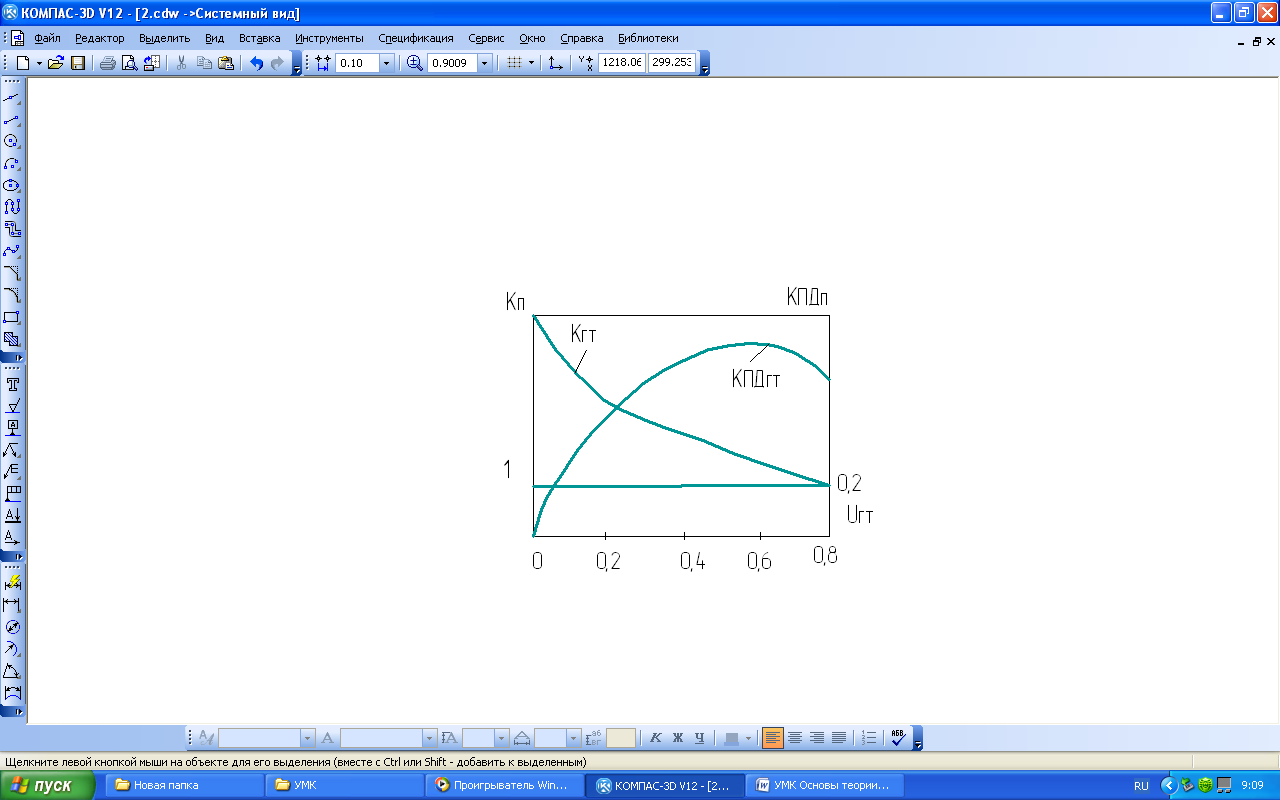
Рисунок 10 - Характеристика непрозрачного ГТ
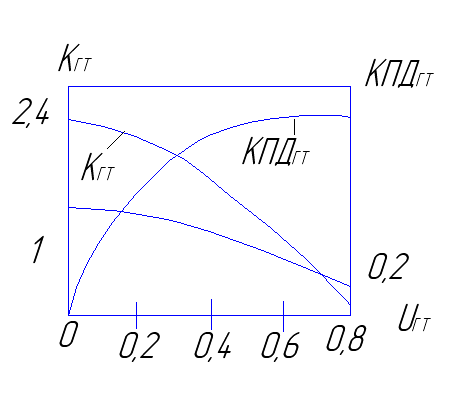
Рисунок 11 - Характеристика прозрачного ГТ
Эксплуатационные показатели транспортных средств
Проходимость машин
По проходимости колесные машины условно делятся на три группы. В основу классификации принимается соотношение между общим числом колес машины и числом ее ведущих колес. Это соотношение принято выражать колесной формулой.
Например, ЗИЛ-130 4К2; МАЗ-509 4К4; КРАЗ3-255л 6К6.
К первой группе относятся автомобили ограниченной проходимости, с одной ведущей осью - 4К2, 6К2; ко второй – повышенной проходимости – 4К4, 6К6, 6К4, с двумя или тремя ведущими мостами; к третьей – высокой проходимости, имеющие специальную компоновку или конструкцию 8К8, 10К10.
Проходимость автомобилей зависит от тяго-динамических показателей, опорно-ценных качеств, геометрических параметров, конструкции ходовой части и трансмиссии.
Тяго-динамические показатели
Динамический фактор
Для преодоления повышенного сопротивления дороги (при бездорожье) машины должны обладать лучшими динамическими качествами, то есть большей тягой, силой и динамическим фактором, чем для автомобилей работающих на хороших дорогах. Поэтому динамический фактор является основным критерием оценки проходимости.
У автомобилей 4К2 и 6К4 максимальный динамический фактор равен 0,3÷0,35.
У полноприводного динамический фактор – 0,6…0,8.
У автопоездов динамический фактор – 0,25…0,4
Условие движения автомобилей имеет вид:
 .
.
Для
получения динамического фактора,
обеспечивающего преодоление максимального
сопротивления движению
 необходимо увеличить передаточное
число трансмиссии. Достигается путем
включения в трансмиссию дополнительных
коробок передач (демультипликаторов),
коленных редукторов.
необходимо увеличить передаточное
число трансмиссии. Достигается путем
включения в трансмиссию дополнительных
коробок передач (демультипликаторов),
коленных редукторов.
Так
как
 ,
то чтобы реализовать
без буксования необходимо увеличить
сцепной вес и сцепление шин с дорогой
.
,
то чтобы реализовать
без буксования необходимо увеличить
сцепной вес и сцепление шин с дорогой
.
У
I
группы -
 .
.
У
II
и гус. тр. -
 .
.
Удельная мощность
Удельная мощность влияет на скорость движения, производительность, маневренность и проходимость.
Удельная мощность у лесовозных автопоездов 5…8 л∙с/т.
Удельная мощность автомобилей общего пользования 15…20 л∙с/т.
Удельная мощность трелевочных тракторов 8…9 л∙с/т.
Дифференциал
Наличие дифференциала снижает проходимость автомобиля из-за его свойства распределять крутящий момент между ведущими колесами, так как одно ведущее колесо, находясь на скользком участке, буксует, а другое, имеющее достаточное сцепление, неподвижно. Неподвижное колесо не в состоянии развить достаточную силу тяги и сдвинуть машину, так как к нему не может быть подведен момент, больший момента, подводимого к буксующему колесу.
Для повышения силы сцепления небуксующего колеса применяют блокирующиеся дифференциалы (принудительная блокировка, самоблокировка) повышенного трения.
Гидромуфта, гидротрансформатор. Наличие этих агрегатов в трансмиссии автомобиля способствует повышению проходимости при движении по мягким и влажным грунтам, где большую роль играет минимальная скорость движения (0,5…1,5 км/час) и плавное изменение ее. Снижение скорости движения приводит к уменьшению срезания грунта и предотвращает буксование колес.
Опорно-сцепные показатели
Тяговые качества. Проходимость современного трактора или автомобиля практически не ограничивается недостатком крутящего момента двигателя, а ограничивается из-за недостаточного сцепления ведущих колес или гусениц с опорной поверхностью.
Согласно тяговому балансу:
 .
.
Отсюда
следует, что проходимость обеспечивается
если
 .
.
Повышение проходимости можно достигнуть путем увеличения коэффициента сцепления.
Величина зависит от: типа и конструкции ходовой части; вертикальной нагрузки; типа и состояния дороги или опорной поверхности.
Повышение сцепных свойств и проходимости осуществляется:
- применением шины типа «вездеход» низкого давления с регулировкой давления на ходу (ЗИЛ 131, УРАЛ-375, ГАЗ-66). Шины типа «вездеход» имеют протектор с крупным расчлененным рисунком и выступы грунтозацепы. Выступающие элементы протектора, вдавливаясь в грунт, обеспечивают лучшее зацепление шин, а широко расставленные грунтозацепы – самоочищение от грязи;
-
широкопрофильные шины
 ,
допускающие для преодоления труднопроходимых
участков при снижении давления в шинах
до 0,5 кг/см2.
К преимуществам этих шин относятся:
лучшее сцепление с опорной поверхностью
за счет широкой беговой части протектора
и более полного контакта с опорной
поверхностью по всей его ширине; меньшая
жесткость;
,
допускающие для преодоления труднопроходимых
участков при снижении давления в шинах
до 0,5 кг/см2.
К преимуществам этих шин относятся:
лучшее сцепление с опорной поверхностью
за счет широкой беговой части протектора
и более полного контакта с опорной
поверхностью по всей его ширине; меньшая
жесткость;
-
применение арочных шин
 .
Площадь опоры арочных шин 2,5…4 раза
больше, чем общая площадь обычных
сдвоенных шин. Что понижает удельное
давление на грунт и высокую опорную
проходимость;
.
Площадь опоры арочных шин 2,5…4 раза
больше, чем общая площадь обычных
сдвоенных шин. Что понижает удельное
давление на грунт и высокую опорную
проходимость;
-
применение при работе на снегу, нику,
пахоте пневмокатков. Имеют большую
ширину профиля
 .
Низкое внутреннее давление и большая
ширина профиля обеспечивают большую
площадь контакта и хорошее сцепление
с опорной поверхностью, что позволяет
реализовать большие тяговые усилия;
.
Низкое внутреннее давление и большая
ширина профиля обеспечивают большую
площадь контакта и хорошее сцепление
с опорной поверхностью, что позволяет
реализовать большие тяговые усилия;
-
применение «шипованных» шин. Коэффициент
сцепления
 по сравнению с
на льду.
по сравнению с
на льду.
- уменьшение удельного давления на опорную поверхность.
Геометрические параметры
Дорожный просвет
Расстояние между низшими точками машины и плоскостью опорной поверхности, характеризующее возможность движения без задевания препятствий.
У
автомобилей работающих на трелевке с
заходом на лесосеку имеют
 мм и более.
мм и более.
Передний
 и задний
и задний
 углы проходимости.
углы проходимости.
Эти углы характеризуют проходимость автомобилей и тракторов по неровным дорогам в моменты выезда на препятствие и съезда с него.
Радиусы
продольной
 поперечной проходимости
поперечной проходимости
 .
.
Эти радиусы определяют очертания препятствия, которое, не задавая, может преодолеть автомобиль. Малые величины радиусов продольной и поперечной проходимости соответствуют лучшей проходимости автомобиля. Чем меньше база автомобиля, тем меньше .
Влияние конструкции на проходимость машины
Ведомые и ведущие колеса. Ведомые колеса хуже преодолевают вертикальное препятствие, чем ведущие, так как ведомое колесо упирается в препятствие, а ведущее стремиться его преодолеть перекатыванием.
Колея передних и задних колес. Подвеска. Независимая и балансирная подвеска способствует улучшению проходимости, благодаря лучшей приспособляемости колес к неровностям дороги.
Основные понятия о плавности хода и колебаниях машины
Колебания машины
В процессе движения автомобиля толчки и удары, действующие со стороны дороги, вызывают угловые и линейные колебания подрессоренных (вес которых воспринимается рессорами) и неподрессоренных (вес которых не воспринимается рессорами) масс.
Под плавностью хода понимается способность подвески поглощать толчки, удары и колебательные процессы, возникающие при движении. Плавность хода является важным эксплуатационным свойством машины, характеризующим совершенство подвески и определяющим надежность, долговечность, производительность и топливную экономичность машины, комфортабельность езды и утомляемость водителя.
На плавность хода влияют:
- характер микронеровностей пути;
- скорость движения;
- компоновка машины, конструкция и характеристики элементов подвески.
Для оценки плавности хода тяговых машин выбирают оценочный параметр – критерий, характеризующий плавность хода и качество подвески, а также позволяющий сравнивать различные ее конструктивные решения и характеристики. Чем меньше значение имеет критерий, тем лучшем качеством обладает подвеска.
При изучении влияния воздействий пути только на машину в качестве критерия принимают максимальное и среднее квадратичное значение абсолютных ускорений, иногда используют среднее квадратичное отклонение третий производной абсолютных перемещений, подвесочных масс. Колебания машины являются случайной функцией, поэтому и критерий плавности хода должен быть вероятностным. Иногда оценивают плавность хода по воздействию колебаний на человека. При этом характер исследования и динамический модуль путь – подвеска – машина – водитель резко усложняются и изменяют требования к параметру, применяемого в качестве критерия плавности хода. Принятый в качестве критерия плавности хода, должен отражать влияние на организм человека, характер действующих возмущений с учетом частоты процесса, амплитуды направления линейных перемещений, совместного действия линейных и угловых перемещений и явлений типа морская болезнь.
Выбор параметров и проектирования подвески проводится с учетом восприятия организмом человека колебаний в определенном диапазоне частот. Известно, что при двухмассовой системе, резонансные частоты органов тела находятся в пределах 4,5…5 Гц, а при продольных колебаниях образуется дополнительный резонанс с частотой 1,8…2 Гц.
Особенно плохо воспринимаются организмом человека возбуждения с частотами, близкими к резонансу органов тела. Физиологически человек привык к вертикальным колебаниям, близким по частоте колебаниям, возникающим при ходьбе, 60…100 колебаний в минуту. При частотах выше наступает неприятная тряска, а меньше частоты вызывают укачивание и даже появления симптомов морской болезни. Методы оценки влияния ускорений на организм человека сориентированы на предельно допустимые ускорения, которые испытывает человек при ходьбе. Например, при спокойной ходьбе человек испытывает 0,25g, а при спрыгивания с небольшого возвышения – 2,8…3,0g. Поэтому в качестве предельно допустимых значений ускорений рекомендуется 2,8…3,0g, а для кратковременных непрерывных воздействий – не более 1,1…1,7g.
Машина в общем виде представляет собой многомассовую колебательную систему, в которой дискретные массы связаны упругими связями и имеются элементы рассеивания энергии. Такая система имеет несколько степеней свободы, но при оценки плавности хода ограничиваются рассмотрением колебаний подрессоренной массы машины в вертикальной плоскости, проходящей через плоскость продольной симметрии машины.
Такие колебания называются угловыми и вертикальными плоскими колебаниями подрессоренной массы машины.
В упрощенном виде при линейной характеристике упругих элементов свободные вертикальные перемещения подрессоренной массы представляет собой гармонический процесс. Частота колебаний подрессоренной массы является определяющим параметром колебательного процесса и оказывает существенное влияние на ускорение, скорость изменения ускорений и на организм человека.
Для установления связи параметров рассмотрим свободные вертикальные колебания подрессоренной массы машины на схеме с одной степенью свободы при линейной характеристике упругих элементов и отсутствии рассеивания энергии в подвеске.
Подрессоренная
масса
 опирается на рессоры, приведенная
жесткость которых:
опирается на рессоры, приведенная
жесткость которых:
 ,
,
где - вес подрессоренной массы;
 -
статический прогиб рессоры.
-
статический прогиб рессоры.
Динамическое состояние системы представляется уравнением:
 ,
,
где
 - текущее значение отклонения масс.
- текущее значение отклонения масс.
Уравнение можно записать:
 .
.
После интегрирования получим:
 .
.
Определение коэффициентов А и В начальных условий приведем уравнение к виду:
 ,
,
где
 - максимальная амплитуда;
- максимальная амплитуда;
 -
частота собственных колебаний.
-
частота собственных колебаний.
Период колебаний:
 .
.
Частота колебаний в минуту:
 .
.
Выразим массу М через коэффициент жесткости и статический прогиб рессоры :
 .
.
Таким образом, чем мягче подвеска, тем ниже частота собственных колебаний. С коэффициентом жесткости рессор связаны дорожный просвет машины, возможный подъем колес и прогиб рессора.
Дифференцированием уравнения находят:
скорость колебаний:
 ;
;
ускорение:
 ;
;
скорость ускорения:
 .
.
Все параметры зависят от максимальной амплитуды и угловой частоты.
Тормозная динамика колесных машин
Тормоза предназначены для снижения скорости движения и полной остановке машины, а также для удержания ее на уклоне. Торможение представляет собой искусственно создаваемое сопротивление движению, которое обеспечивается установкой тормозных устройств.
Кинетическая энергия машины в процессе торможения поглощается силами трения, возникающими в тормозе и преобразуются в тепло.
Для безопасности движения устанавливаются две независимые тормозные системы: основная и стояночная.
На современных автомобилях применяются основной и стояночный тормоза колодочного, барабанного типа.
Движение
машины при торможении получается из
дифференциального уравнения движения,
если заменить касательную силу тяги
 тормозной силой
тормозной силой
 ,
взяв ее со знаком минус:
,
взяв ее со знаком минус:
 ,
,
где - тормозная сила.
Для оценки тормозных качеств применяются следующие показатели:
1.
Максимальная величина замедления
 ,
которая может быть достигнута при
торможении.
,
которая может быть достигнута при
торможении.
 ,
м/с2;
,
м/с2;
 ,
,
где - коэффициент сцепления.
При
экстренном торможении
 м/с2,
при служебном торможении
м/с2,
при служебном торможении
 м/с2.
м/с2.
2. Минимальное время торможения:
 ,
,
где
 - скорость в момент начала торможения,
км/ч.
- скорость в момент начала торможения,
км/ч.
3. Минимальный путь торможения:
 .
.
Путь не зависит от веса автомобиля и пропорционален квадрату скорости.
Тормозные механизмы
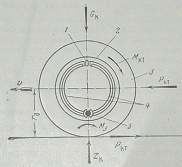
Рисунок 12 - Схема сил действующих на колесо
Наиболее
честь на грузовых автомобилях применяются
тормоз с активной 1 и пассивной 4 колодками,
которые шарнирно связаны с неподвижными
опорами. При работе тормоза силы
прижимают колодки к барабану 2. При
вращении колеса между барабаном и
фрикционными накладками колонок
возникают силы трения
 и
и
 .
.
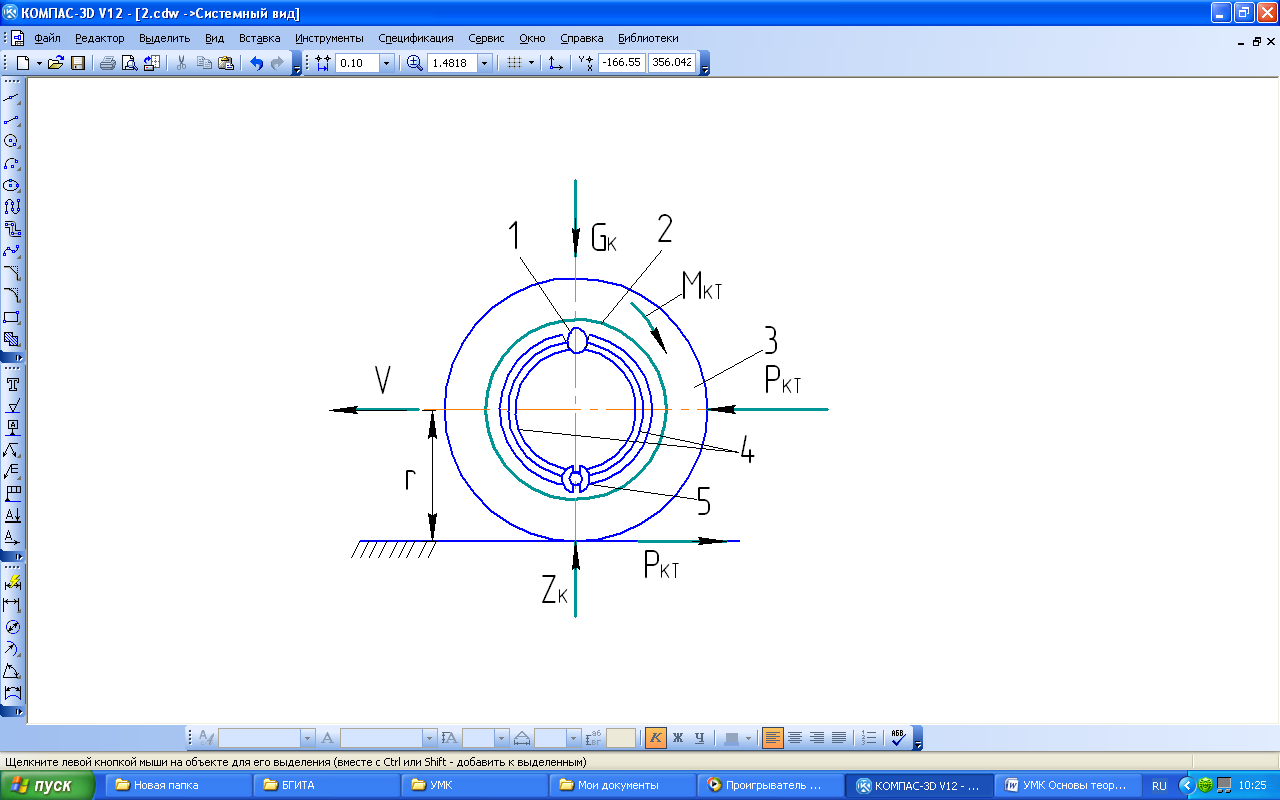
Рисунок 13 – Расчетная схема
Дополнительное прижатие первой колодки к барабану силами трения называется самоусиливающим эффектом.
Тормозной
момент от сил трения
и
:
 противодействует вращению колеса.
Заторможенное колесо стремиться сдвинуть
верхний слой дороги с силой
противодействует вращению колеса.
Заторможенное колесо стремиться сдвинуть
верхний слой дороги с силой
 .
.
Со стороны дороги на колесо действует такая же по величине сила – касательная реакция, называемая тормозной силой:
 ,
,
где - коэффициент сцепления колеса с дорогой;
![]() -
реакция дороги на тормозное колесо.
-
реакция дороги на тормозное колесо.
Если
 возникает буксировка колес. Колесо не
вращается, а скользит «юзом». Блокировка
колес увеличивает тормозной путь,
ухудшает управляемость машины.
возникает буксировка колес. Колесо не
вращается, а скользит «юзом». Блокировка
колес увеличивает тормозной путь,
ухудшает управляемость машины.
Тормоза замедлители
На автомобилях, работающих в тяжелых рельефных условиях, применяются в качестве дополнения к основной системе тормоза-замедлители. Они используют для замедления движения, а не для полной остановки машины, что облегчает режим работы основной тормозной системы. Тормозной момент, создаваемый замедлителем, распределяется по ведущим колесам равномерно и полностью исключает их блокировку.
На автомобилях МАЗ-509 и КРАЗ-255Л установлены тормоза-замедлители компрессорного типа – моторный тормоз. Действие моторного тормоза основано на создании противодавления в выпускном трубопроводе двигателя путем дросселирования его проходного сечения. Управления тормозом сблокировано с системой подачи топлива.
Торможение поезда
Торможение автомобиля или трактора, поезда можно рассматривать как суммарное торможение шарнирно-соединенных между собой повозом, каждая из которых получает соответственные замедления. При этом необходимо согласовать действие тормозов тягача и прицепов таким образом, чтобы предотвратить набегание прицепов на тягач и одного прицепа на другой. Поэтому привод управления тормозным краном спроектирован таким образом, чтобы прицепы начинали тормозится несколько раньше и оттормаживаться позже, чем тягач.
Для выполнения этого требования необходимо:
 .
.
Поворот колесных машин
Способы и кинематика поворота
Поворот автомобиля может осуществиться:
Изменением направления движения управляемых колес;
Созданием разности крутящих моментов;
Изменением положений сечений шарнирно-сочлененной рамы (К-700; К-703; Т-125).
Способ позволяет использовать тягово-сцепные свойства и улучшить (управляемость) маневренность машины.
На автомобиле управляемой делают только переднюю пару колес.

Рисунок 14- Кинематика поворота автомобиля с двумя передними управляемыми колесами.
Чтобы наружное и внутреннее колесо катились по дугам окружностей с общим центром О, необходимо повернуть их на разные углы. Связь этих углов можно определить из условия пересечения перпендикуляров векторов скоростей, колес в центре вращения О:


Таким
образом база
и колея
 влияют
на маневренность машины.
влияют
на маневренность машины.
Для обеспечения связи между углами поворота колес применяются специальные четырехзвенные шарнирные механизмы – рулевые трапеции.
Конструктивно рулевое управление состоит из рулевого механизма и рулевого привода.
Рулевой механизм могут иметь трущиеся пары. Червяк-ролик, червяк-сектор, винт-гайка. На автомобилях большой грузоподъемности устанавливается комбинированный рулевой механизм в виде сочетания: винт – гайка – рейка - сектор. Для уменьшения коэффициента трения винт – гайка осуществляется через циркулирующие шарики.
Механизм
и приводы руля выполняются с большим
угловым передаточным числом
 .
.

 -
угол
поворота рулевого колеса;
-
угол
поворота рулевого колеса;
 -
угол
поворота управляемого колеса.
-
угол
поворота управляемого колеса.
 .
Это позволяет при малом усилии на рулевом
колесе преодолевать значительное
сопротивление дороги повороту управляемых
колес. С увеличением
снижается необходимое усилие на рулевом
колесе, но растет угол его поворота и
время, необходимое для полного поворота
управляемых колес.
.
Это позволяет при малом усилии на рулевом
колесе преодолевать значительное
сопротивление дороги повороту управляемых
колес. С увеличением
снижается необходимое усилие на рулевом
колесе, но растет угол его поворота и
время, необходимое для полного поворота
управляемых колес.
Установка передних колес
Для повышения устойчивости прямолинейного движения передних колес и облегчения вывода автомобиля из поворота передние колеса устанавливаются с развалом в вертикальной и схождением в горизонтальной плоскостях.
Угол
развала колес γ представляет собой угол
наклона плоскости колеса к плоскости
перпендикулярной дороге. При износе
подшипников центр развал исключает
наклон колеса во внутреннюю сторону,
который приводит к быстрому износу шин.
 .
.
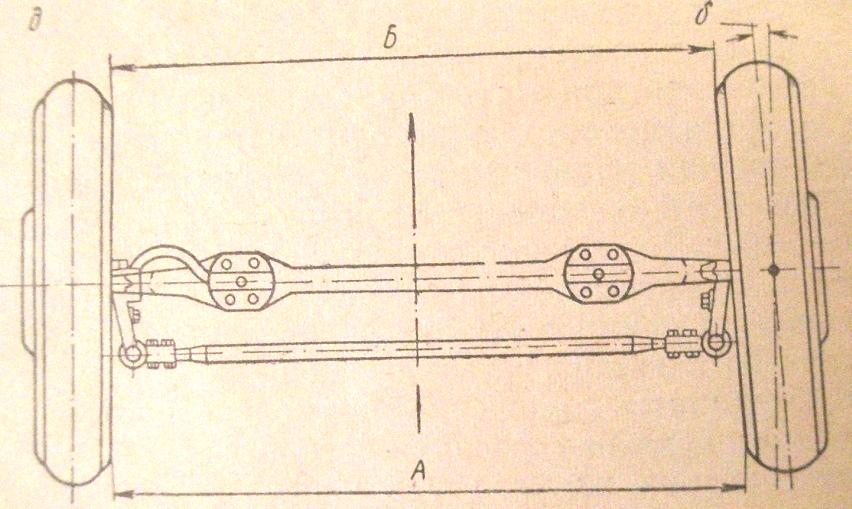
Рисунок15- Установка передних колес
Угол схождения колес устанавливается для предупреждения разворачивания колес в стороны от прямолинейного направления движения. Это уменьшает износ шин, нагруженность ходовой системы и рулевого управления. Схождение колес определяется разностью размеров А и В.
Устойчивость колесных машин
Продольная устойчивость колесных машин.
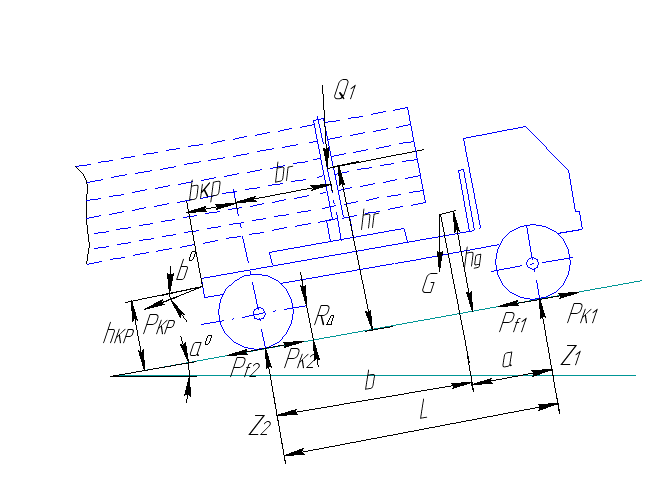
Рисунок 16- Расчетная схема к расчету устойчивости
У современных автомобилей с низко расположенным центром тяжести опрокидывание в продольной плоскости маловероятно. Колесные трактора или колесные тягачи повышенной проходимости, обычно имеют короткую базу и высоко расположенный, из-за большого клиренса, центр тяжести. Поэтому и опасность продольного опрокидывания для этого типа машин резко возрастает.
Продольная устойчивость автомобилей и тракторов нарушается, когда под действием внешних сил и моментов передние и задние колеса начинают отрываться от грунта.
Следовательно, потеря устойчивости характеризуется условием Z1 = 0 или Z2 = 0, гдеZ1 и Z2 – нормальные реакции грунта на колеса.
Когда автомобиль стоит неподвижно на горизонтальной площадке
 ;
;

При ускоренном движении на подъем, наличие сопротивления воздуха


При установившемся движении без прицепа


Снижение нагрузки на переднюю ось вызывает соответствующие увеличение нагрузки на заднюю. На перераспределение нагрузок и на продольную устойчивость машины существенное влияние оказывают конструктивные параметры h, L, a, hкр. На автомобилях и тракторах типа 4х2 для увеличения сцепного веса центр тяжести располагают близко к оси задних колес так, что для неподвижной машины
 ,
однако это грозит нарушением продольной
устойчивости и ухудшением управляемости.
,
однако это грозит нарушением продольной
устойчивости и ухудшением управляемости.
Для колесных трелевочных тракторов и лесных автомобилей для продольной устойчивости большое влияние оказывает наличие всех ведущих колес. В этом случае перераспределение нагрузок на оси не сказываеться на величине сцепного веса, который равен сумме Z1 + Z2.
Уравнение потери продольной устойчивости колесной машины, когда опрокидывание происходит вокруг точек опоры задних колес Z1 или
 .
.
Пользуясь полученным соотношением, можно определять предельные углы подъема.
Например, предельный угол подъема, на котором автомобиль стоит с заторможенными колесами, не сопротивляясь.


Таким образом, предельные углы подъема и спуска зависят от соотношения базы машины L и высоты центра тяжести h, а также от его продольной координаты α.
Лекция 2.Основы теории гусеничных машин