

7.Реактивные и активные моменты в механической части электропривода
Кроме электромагнитного момента на механическую часть электропривода действуют статические нагрузки, которые делятся на силы и моменты механических потерь и силы и моменты полезных нагрузок исполнительных механизмов:
![]() (2.9)
(2.9)
где первая составляющая суммы является суммарными потерями в двигателе и в исполнительном механизме, а вторая – суммарным приведённым моментом полезной нагрузки.
По характеру взаимодействия с электроприводом различаются активные и реактивные силы и моменты.
Активными силами и моментами называются силы и моменты, величина и направление которых не зависит от движения электропривода; например, силы и моменты, создаваемые перемещаемым по вертикали грузом. Механическая характеристика такого вида статической активной нагрузки изображена на рис. 2.5.

![]()
![]()
a) б)
Рис. 2.5. Активные нагрузки электропривода неуравновешенного (а) и уравновешенного (б) подъемных механизмов.
В зависимости
от соотношения масс
![]() и
и
![]() двигатель
работает в тормозном (
двигатель
работает в тормозном (
![]() )
или двигательном (
)
или двигательном (
![]() )
режимах.
)
режимах.
Силы и моменты, возникающие как реакции на движение электропривода, называются реактивными. Направление их всегда противоположно направлению движению электропривода. По характеру зависимости от скорости реактивных сил и моментов различают нагрузки типов сухого трения (рис. 2.6):

![]()
![]()
a) б)
Рис. 2.6. Реактивные нагрузки: сухое трение (а) и момент резания (б).
В момент трогания силы сухого трения могут превышать свои значения при движении (рис. 2.6а).
Силы и моменты вязкого трения зависят от скорости линейно (рис. 2.7):
![]() (2.10)
(2.10)

Рис. 2.7. Момент нагрузки типа вязкого трения.
Момент внутреннего вязкого трения:
![]() (2.11)
(2.11)
где
![]() и
и
![]() –
скорости на входе и выходе деформируемого
элемента.
–
скорости на входе и выходе деформируемого
элемента.
8.Основные виды механических характеристик производственных механизмов
При выборе электрического двигателя, приводящего в действие производственный механизм, необходимо соответствие механических свойств характеристикам производственного механизма.
Каждый производственный механизм в зависимости от технологического процесса имеет свою механическую характеристику. Механической характеристикой производственного механизма называется зависимость скорости вращения ωс от момента сопротивления производственного механизма Mс. Так как производственные механизмы обладают большим разнообразием характеристик. Чтобы как-то их классифицировать, используется эмпирическая формула:
Mс = M0 + (Mвр – Mсн)(ω/ωн)x
Mс – момент сопротивления производственного механизма при скорости ω. M0 – момент трения в движущихся частях производственного механизма. Mсн – момент сопротивления при номинальной скорости вращения ωн. x – показатель степени, характеризующий изменение момента сопротивления при изменении скорости.
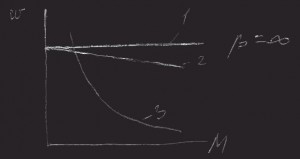
1. При x=0 момент сопротивления не зависит от скорости вращения ω и механическая характеристика будет представлять собой прямую линию, параллельную оси скорости. 2. x=1 – линейно возрастающая характеристика. с увеличением сопротивления увеличивается и скорость вращения производственного механизма. 3. x=2 – характеристика не линейно возрастающая. Момент сопротивления будет зависеть от квадрата скорости. 4. x=-1 – характеристика нелинейно убывающая. Момент сопротивления Mс обратно пропорционален скорости, но при этом мощность будет оставаться постоянной.
Характеристика первого типа относится к таким производственным механизмам, как поршневые насосы, механизмы подачи станков, электрические приводы конвейеров.
Характеристики второго типа обычно бывают у механизмов подъема кранов.
Характеристиками третьего типа обладают вентиляторы, центробежные насосы, компрессоры.
Характеристику четвертого типа имеют приводы шпинделей и планшайб.
Электрические двигатели делятся на различные виды по жесткости характеристик:
1. Абсолютно жесткая характеристика, у которой скорость вращения не зависит от нагрузки. Жесткостью называется отношение приращения момента к приращению скорости.
β = ΔM / Δω
2. Жесткая характеристика. Наклон этой характеристики относительно максимальной скорости зависит от параметров двигателя. Характеристику этого типа имеет двигатель постоянного тока (ДПТ) и асинхронный двигатель на рабочей части механической характеристики.
3. Мягкая характеристика. Данная механическая характеристика отличается резким снижением скорости при увеличении нагрузки. Характеристика этого типа будет у двигателей постоянного тока независимого и смешанного возбуждения.
9.Механизмы с независящим от скорости моментом сопротивления Мс(омега)=const.
При рассмотрении работы электродвигателя, приводящего в действие производственный механизм, необходимо, прежде всего, выявить соответствие механических характеристик двигателя характеристике производственного механизма. Поэтому для правильного проектирования и экономичной эксплуатации электропривода необходимо изучить эти характеристики
Моменты сопротивления механизмов можно разделить на две категории, а именно:
1) реактивные моменты – моменты сопротивления от сжатия, резания, моменты трения и т. п., препятствующие движению привода в любом направлении и изменяющие свои знак при изменении направления вращения.
2) активные или потенциальные моменты – моменты от силы тяжести, а также от растяжения, сжатия и скручивания упругих тел. Эти моменты могут быть названы потенциальными, поскольку они связаны с изменением потенциальной энергии отдельных элементов привода. Потенциальные моменты могут тормозить движение привода или, наоборот, способствовать его движению. Следует отметить, что, в отличие от реактивного статического момента, активный момент сохраняет свой знак при изменении направления вращения привода. Например, момент, создаваемый грузом подъемного механизма, сохраняет свой знак как при подъеме его, так и при опускании. Следовательно, в данном случае активный статический момент при подъеме препятствует движению, а при опускании способствует ему.
Зависимость между приведенными к валу двигателя скоростью и моментом сопротивления механизма = f (Mc) называют статической механической характеристикой производственного механизма.
Различные производственные механизмы обладают различными механическими характеристиками. Однако можно получить некоторые обобщающие выводы, если воспользоваться следующей эмпирической формулой для механической характеристики производственного механизма:
 ,
(3.1)
,
(3.1)
где Мс – момент сопротивления производственного механизма при скорости ; М0 – момент сопротивления трения в движущихся частях механизма; Мсн – момент сопротивления при номинальной скорости ωн; х – показатель степени, характеризующий изменение момента сопротивления при изменении скорости.
Приведенная формула позволяет классифицировать механические характеристики производственных механизмов ориентировочно на следующие основные группы.
|
1. Не зависящая от скорости механическая характеристика (прямая 1 на рис. 3.1)[2]. При этом х = 0 и момент сопротивления Мс не зависит от скорости. Такой характеристикой обладают, например, подъемные краны, лебёдки, механизмы подач металлорежущих станков, поршневые насосы при неизменной высоте подачи, конвейеры с постоянной массой передвигаемого материала. |
