

40. Вентильно-индукторный электропривод
Развитие силовой и информационной электроники в последней четверти XX в. привело к появлению на рынке ряда новых электроприводов с различными типами электромеханических преобразователей (синхронными реактивными, синхронными с постоянными магнитами, индукторными и др.) и электронными коммутаторами — аналогами традиционных коллекторов.
Среди этих новых электроприводов особенно выделяется вентильно-индукторный электропривод (ВИП), или Switched Reluctance Drive (SRD).
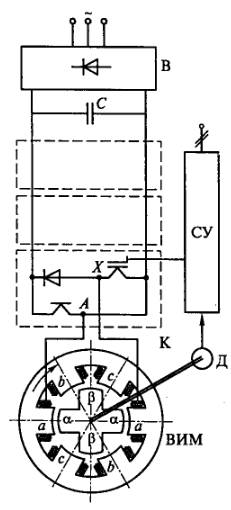
Рис. 3.35. Вентильно-индукторный электропривод
Вентильно-индукторный электропривод (рис. 3.35) состоит из собственно двигателя — вентильно-индукторной машины (ВИМ), электронного коммутатора К, подключенного к выпрямителю В параллельно с конденсатором С, и управляемого обычно датчиком положения ротора Д через схему управления СУ. ВИМ имеет явнополюсный статор, например с n = 6 полюсами, несущий сосредоточенные обмотки (катушки), и явнополюсный пассивный ротор, число полюсов которого отличается от числа полюсов статора, например m = 4. Катушки связаны с электронным коммутатором, на каждую из n/2 фаз которого приходятся в рассматриваемом примере два ключа — транзистора — и два диода (на рис. 3.35 показана только одна фаза АХ).
Принцип действия ВИП состоит в притяжении металлического тела зубца ротора к возбужденному полюсу статора. Так, в изображенном на рис. 3.35 состоянии возбуждена фаза АХ и к полюсам a статора притянуты зубцы α ротора. При отключении фазы АХ (конденсатор С позволяет это сделать без осложнений) и включении BY (на рис. не показана) к возбужденным теперь зубцам b статора притянутся ближайшие зубцы ротора β. Поле повернется по часовой стрелке на угол 2π/n, а ротор — против часовой стрелки на угол
![]()
Если повторять указанный процесс коммутаций, то ротор будет перемещаться. Управление движением (выбор моментов включения и отключения фаз, формирование нужных импульсов тока и т.д.) осуществляется датчиком Д и схемой управления СУ.
На каждом такте коммутации по мере перехода ротора от рассогласованного состояния 1 к согласованному состоянию 2 потокосцепление Ψ и ток i изменяются по сложной траектории (рис. 3.36, а).
Общее выражение для механических характеристик можно получить из основного уравнения, описывающего этот процесс на каждом такте коммутации:
![]()
При ряде сильных допущений (линейное изменение Ψ, прямоугольная форма импульсов тока (рис. 3.36, 5), приняв Ψ = Li и пренебрегая iRф, будем иметь на каждом угловом шаге θ:
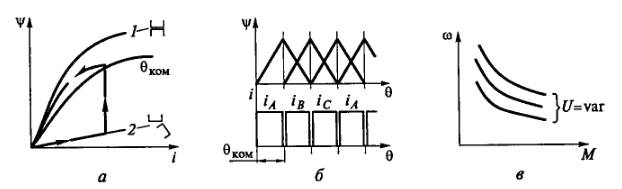
Рис. 3.36. Характеристики вентильно-индукторного электропривода: а — зависимость Ψ = f(i)); б — зависимости Ψ(θ) и i(θ); в — механические характеристики

Пренебрегая
![]() и
полагая
и
полагая
![]() и
и
![]() имеем:
имеем:
![]()
Принимая
![]() получим:
получим:
![]()
или
![]()
Механические характеристики двигателя при разных напряжениях показаны на рис. 3.36, в.
Интерес к вентильно-индукторному электроприводу связан с рядом его особенностей.
Во-первых, это предельно простая, технологичная, дешевая и надежная конструкция собственно двигателя ВИМ. В нем не используются существенно усложняющие технологию производства постоянные магниты, цена которых иногда составляет около половины цены всего привода. Отсутствует технологическая операция заливки ротора, неизбежная при производстве асинхронных двигателей с короткозамкнутым ротором. Обмотки (катушки) статора хорошо приспособлены к машинному производству, просты сборка и, что важно при массовых применениях, разборка для ремонта или утилизации. Осуществляется пропитка собственно катушек, а не статора в целом, как у других типов машин, что также снижает долю технологических затрат. Лишь один элемент — датчик положения ротора — выпадает из этого перечня благоприятных особенностей. Итак, машина в ВИП позволяет преодолеть устойчивую тенденцию роста на 10... 12% в год цены основных типов электрических машин: ее цена может быть в 1,5 — 2 раза ниже цены самого дешевого асинхронного двигателя.
Во-вторых, электронный коммутатор должен обеспечивать подачу на фазы ВИМ однополярных импульсов, что позволяет выполнить его более надежным в сравнении с аналогичным преобразователем частоты для асинхронного электропривода, так как ликвидируется опасность сквозных коротких замыканий и упрощается защита.
В-третьих, по основным массогабаритным и энергетическим показателям ВИП не уступает и даже превосходит частотно-регулируемый асинхронный электропривод.
Это связано с важной особенностью ВИМ — полезным использованием насыщения магнитной цепи.
В-четвертых, благоприятные функциональные особенности ВИП: большие моменты при низких скоростях и небольших токах, гибкое управление скоростью, широкий диапазон плавного регулирования скорости — делают этот привод очень привлекательным для широких применений.
В-пятых, большое разнообразие структур ВИМ (различные отношения n/m = 6/4, 8/6,... различные способы коммутации фаз) делают этот привод хорошо применимым как в низкооборотных (сотни оборотов в минуту), так и высокооборотных (десятки тысяч оборотов в минуту) версиях.
Итак, ВИП — серьезный конкурент современных регулируемых электроприводов без ограничения по мощности, скорости и т.д. Однако массовым этот электропривод не стал.
При простой структуре и конструкции (см. рис. 3.35) ВИП содержит один весьма сложный блок — схему управления СУ, от которой в сильной степени зависит вся работа привода. Это его мозг, и его несовершенное функционирование приводит к неудовлетворительной работе всего объекта.
В качестве основы для схемы управления использованы современные микропроцессорные средства, организующие посредством ШИМ задание нужного напряжения, а также токоограничение, формирование импульсов тока требуемой формы.
В процессе совершенствования схемы управления ВИП удалось в первом приближении устранить его конструктивный недостаток — избавиться от датчика положения ротора, заменив его простыми датчиками тока и напряжения. Это повлияло на конструктивный облик ВИМ — машина стала много проще короткозамкнутого асинхронного двигателя.
Новый вентильно-индукторный электропривод близок к перспективному практическому применению во многих сферах, где необходим простой и надежный энергосберегающий регулируемый электропривод.
40 вопрос
Вентильно–индукторный двигатель – это относительно новый тип электромеханического преобразователя энергии, который сочетает в себе свойства и электрической машины, и интегрированной системы регулируемого электропривода. Как всякий электродвигатель, он обеспечивает преобразование электрической энергии, которая поступает от питающей сети, в механическую энергию, передаваемую в нагрузку. Как система регулируемого электропривода, ВИД дает возможность осуществлять управление этим процессом в соответствии с особенностями конкретной нагрузки: регулировать частоту вращения, момент, мощность и так далее.
ВИД представляет собой достаточно сложную электромехатронную систему, структурная схема которой приведена на рис. 1 [1].
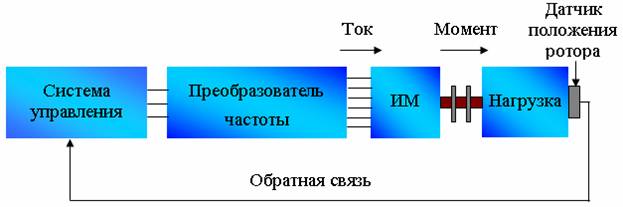
Рис. 1. Структурная схема ВИД.
В ее состав входят: индукторная машина (ИМ), преобразователь частоты, система управления и датчик положения ротора (ДПР). Функциональное назначение этих элементов ВИД очевидно: преобразователь частоты обеспечивает питание фаз ИМ однополярными импульсами напряжения прямоугольной формы; ИМ осуществляет электромеханическое преобразование энергии, система управления в соответствии с заложенным в нее алгоритмом и сигналами обратной связи, поступающими от датчика положения ротора, управляет данным процессом.