

История и тенденции развития приводов технологических машин в горно-металлургической и нефтегазовой отраслях.
1838 г. –академик Якоби изобрел двигатель постоянного тока.
1889 г. – Доливо - Добровольоский изобрел асинхронный двигатель.
1879 г . – офицер русского долота Костович В.С. , изобрел корбюраторный двигатель.
1893 г . – Рудольф Дизель изобрел двигатель внутреннего сгорания (ДВС) работающий на солярке и двигатель называется дизельным .
1962 г . – Гамынин Н.С. опубликовал монографию о гидроприводах .
1962 г . – Герц Е.В. , опубликовал монографию о пневмоприводе.
2 Определения основных видов приводов технологических машин и исполнительных механизмов.
, совокупность устройств для преобразования электрической энергии в механическую и регулирования потока преобразованной энергии по определённому закону. Э. является наиболее распространённым типом привода.
Основные типы
Э. По конструктивному признаку можно выделить три основных типа Э.: одиночный, групповой и многодвигательный. Одиночный Э. применяют в ручных машинах, простых металлообрабатывающих и древообрабатывающих станках и приборах бытовой техники. Групповой, или трансмиссионный, Э. в современном производстве практически не применяется. Многодвигательные Э. — приводы многооперационных металлорежущих станков, мономоторный тяговый Э. рельсовых транспортных средств. Кроме того, различают Э. реверсивные и нереверсивные (см. Реверсивный электропривод), а по возможности управления потоком преобразованной механической энергии — нерегулируемые и регулируемые (в том числе автоматизированный с программным управлением и др.)
Основные части
Э. Э. всех типов содержат основные части, имеющие одинаковое назначение: исполнительную и устройства управления.
Исполнительная часть Э. состоит обычно из одного или нескольких электродвигателей (см. Двигатель электрический) и передаточного механизма — устройства для передачи механической энергии двигателя рабочему органу приводимой машины. В нерегулируемых Э. чаще всего используют электродвигатели переменного тока, подключаемые к источнику питания либо через контактор или автоматический выключатель, играющий роль защитного устройства, либо при помощи штепсельного разъёма (например, в бытовых электроприборах). Частота вращения ротора электродвигателя такого привода, а следовательно, и скорость перемещения связанного с ним рабочего механизма, изменяется только в зависимости от нагрузки исполнительного механизма. В мощных нерегулируемых Э. применяют асинхронные электродвигатели. Для ограничения пусковых токов между двигателем и источником устанавливают пусковые реакторы или автотрансформаторы, которые после разгона двигателя отключают. В регулируемых Э. чаще всего применяют электродвигатели постоянного тока, частоту вращения якорей которых можно изменять плавно, т. е. непрерывно, в широком диапазоне при помощи достаточно простых устройств управления.
В устройства управления входят: кнопочный пульт (для пуска и останова электродвигателя), контакторы, блок-контакты, преобразователи частоты и напряжения, предохранители, а также блоки защиты от перегрузок в аварийных режимах. При питании Э. от источника переменного тока, что характерно для Э., используемых в промышленности и на электроподвижном составе, двигатели которого питаются от сети переменного тока, в качестве преобразующих устройств применяют электромашинные или статические преобразователи электроэнергии — выпрямители.
Гидравлический привод (гидропривод) — совокупность устройств, предназначенных для приведения в движение машин и механизмов посредством гидравлической энергии.Гидропривод представляет собой своего рода «гидравлическую вставку» между приводным двигателем и нагрузкой (машиной или механизмом) и выполняет те же функции, что и механическая передача (редуктор, ремённая передача, кривошипно-шатунный механизм и т. д.).
Функции гидроприводаОсновная функция гидропривода, как и механической передачи, — преобразование механической характеристики приводного двигателя в соответствии с требованиями нагрузки (преобразование вида движения выходного звена двигателя, его параметров, а также регулирование, защита от перегрузок и др.). Другая функция гидропривода — это передача мощности от приводного двигателя к рабочим органам машины .
Виды гидроприводов
Гидроприводы могут быть двух типов: гидродинамические и объёмные.
В гидродинамических приводах используется в основном кинетическая энергия потока жидкости (и соответственно скорости движения жидкостей в гидродинамических приводах велики в сравнении со скоростями движения в объёмном гидроприводе).
В объёмных гидроприводах используется потенциальная энергия давления рабочей жидкости (в объёмных гидроприводах скорости движения жидкостей не велики — порядка 0,5-6 м/с).
Объёмный гидропривод — это гидропривод, в котором используются объёмные гидромашины (насосы и гидродвигатели). Объёмной называется гидромашина, рабочий процесс которой основан на попеременном заполнении рабочей камеры жидкостью и вытеснении её из рабочей камеры. К объёмным машинам относят, например, поршневые насосы,аксиально-поршневые, радиально-поршневые, шестерённые гидромашины и др.
Классификация приводов технологических машин (лекция 2) и наиболее характерные тенденции их развития.
Классификация приводов.
Привод - это система, состоящая из двигателя, системы управления этим двигателем и передачи от двигателя к рабочему органу. В зависимости от назначения различают: · силовой привод - для привода механизмов; · привод управления (двигателями, тормозами, муфтами и т.п.).По виду используемой энергии для создания движущего момента или усилия: · ручной, · паровой, · привод от ДВС, · электрический, · гидравлический, · пневматический. · комбинированные - дизель-электрический, - дизель-гидравлический и т.п.
Для специальных ГПМ при выборе привода учитываются: · соответствие свойств приводного двигателя заданному режиму ГПМ, · характер внешних нагрузок - диапазон их изменения, - зависимость от параметров движения, - учет инерционности механизма, - учет трения в конструкции и т.п., · стоимость изготовления и эксплуатации машины с данным типом привода, · возможность использования того или иного вида энергии в достаточном количестве, · удобство управления ГПМ, · особенности эксплуатации ГПМ: - взрывобезопасность, - пожаробезопасность, - температура окружающей среды, - постоянная готовность к работе и т.п. · зависимость работы ГПМ от источника энергии, · соответствие габаритов привода требованиям рациональной компоновки машины, · диапазон регулирования скорости. Наиболее широко используются следующие привода: · ручной, · электрический, · гидравлический.
Недостатки привода от ДВС: · невозможность пуска под нагрузкой, · обеспечивают вращение только в одну сторону, · невозможность работы с большими перегрузками.
Пневмопривод применяется сравнительно редко - обычно при работе во взрывоопасных помещениях и в качестве управляющего привода (тормозами, муфтами и т.п.).
5 Общие требования к кинематическим схемам приводов технологических машин, рекомендуемые виды передач и их выбор.
ОБЩИЕ ТРЕБОВАНИЯ К КИНЕМАТИЧЕСКИМ СХЕМАМ Выбор и обоснование кинематических схем является первым этапом проектирования передачи. Кинематическая схема строится в зависимости от назначения и условий работы машины. Передачи, устанавливаемые между двигателем и рабочей машиной (рабочий орган), призваны исполнять целый ряд функций, главными из которых являются: 1) понижение или повышение скорости на рабочем органе; 2) повышение или понижение крутящего момента; 3) изменение траектории или характера движения; 4) изменение направления движения (реверсирование); 5) изменение плоскости движения; 6) суммирование или разделение движений и моментов от нескольких двигателей; 7) регулирование скорости; предохранение деталей и сборочных единиц машины от поломок при перегрузках. Выбор кинематической схемы во многом зависит от двигателя, используемого для привода, и требований, предъявляемых к рабочей машине (характер и траектория движения, скорость, крутящий момент и т. д.). Двигатели в зависимости от формы траектории движения его ведущего органа могут быть с вращательным и Еозвратно-поступательным движением. Рабочие органы по форме траектории разделяются на вращательные, возвратно-поступательные, с качательным и сложным движениями, а по характеру движения — с монотонным, разнообразным и циклическим движениями. В машинах с монотонным движением рабочего органа скорость постоянна и длительное время направлена в одну сторону. Двигатель в таких машинах непосредственно соединен с рабочим органом или между ними устанавливается какая-либо передача (зубчатая, цепная, ременная и т. д.). Примерами та^их машин могут служить вентиляторы, транспортеры и т. д. Машины с разнообразным движением имеют переменный силовой и скоростной режимы, которые изменяются вручную или автоматически В таких машинах между двигателем и рабочим органом должна быть установлена управляемая передача (коробка скоростей, вариатор и т. д.). Примерами машин с разнообразным движением служат транспортные машины, станки и т д. Машины, относящиеся к этой группе, характеризуются тем, что движение их рабочего органа происходит по установленному циклу, определяемому условиями работы машины или характером технологического процесса. По такому принципу работают многие автоматы, механизм газораспределения ДВС и т. д. В кинематические схемы таких машин обычно включаются механизмы, позволяющие задавать и регулировать работу машины, кулачковые, кулисные механизмы, механизмы’мальтийского креста, рычажные механизмы и т. д.
ВИДЫ ПЕРЕДАЧ, ИХ ПРЕИМУЩЕСТВА И НЕДОСТАТКИ.
В приводе оси с ЧПУ передача используется для преобразования вращательного движения вала двигателя в поступательное движение вдоль оси. Ниже перечислены наиболее широко используемые виды передач в станках ЧПУ.
Передача винт-гайкаПод передачей винт-гайка подразумевается пара стальной винт с трапецеидальной или метрической резьбой и гайка . Данный вид передачи является передачей с трением скольжения и на практике в свою очередь имеет несколько разновидностей.
Строительная шпилька и гайка. Строительные шпильки с гайкой Самый бюджетный вариант. Строительная шпилька вообще не предназначена для использования в станкостроении, техпроцесс её изготовления нацелен на применение в строительной сфере, вследствие чего данный вид передачи обладает самым полным набором недостатков - высокой погрешностью, низкой прямолинейностью, малыми нагрузочными характеристиками, малой износостойкостью, высоким трением и т.д. Однако, все же применяется в DIY-станках, изготавливаемых в учебных целях, вследствии низкой себестоимости. Если Вы решили во что бы то ни стало сэкономить на передаче и поставить строительную шпильку, обязательно предусмотрите возможность замены её на трапецеидальный винт или ШВП! Скорее всего, станок на строительной шпильке не оправдает Ваших надежд.
Приводной винт с трапецеидальной или прямоугольной резьбой.
Передача винт-гайкаВинт с трапецеидальной резьбой - наиболее распространный вид передачи в металлообрабатывающих станках в прошлом веке и по настоящее время. Трапецеидальные винты производятся их разных видов конструкционных углеродистых сталей путем нарезки резьбы на стальном прутке или её накатки. Накатные винты имеют существенно лучшие характерстики, чем нарезные. Широкое применение трапецеидальных винтов обусловливается их широкой номенклатурой, доступностью на рынке винтов разных классов точности, от C10 до С3. Гайка на винт изготавливается из износостойких материалов, таких, как полиамиды(капролон, нейлон), тефлон, бронза.
Шарико-винтовая передача (см. основную статью: ШВП)
передача винт-гайка ШВП, или шарико-винтовая передача(также называют "шарико-винтовая пара"), в настоящий момент является стандартом де-факто при строительстве станков с ЧПУ. Стальной винт с беговыми дорожками для шариков, подвергнутый индукционной закалке и последующей шлифовке, и специальным образом подогнанная гайка с циркулирующими внутри шариками. При вращении винта гайки катятся по беговым дорожкам, передавая усилие на корпус гайки. Такая передача отличается высокой точностью, высокими КПД (80, 90% и более) и ресурсом. ШВП чаще используется в станках с ЧПУ, так как его использование позволяет использовать двигатели меньшей мощности(не требуются столь существенные усилия страгивания, как в случае с передачей винт-гайка). ШВП поставляется как законченная пара, не требует подгонки гайки и зачастую не требует обработки концов для установки в опоры - это делает производитель, т.е. ШВП зачастую соответствует принципу plug and play, тогда как в случае использования трапецеидальных винтов гайки и винты зачастую изготавливаются в разных местах, и могут потребовать тщательной подгонки, без которой могут возникнуть зазоры, люфты, повышенное трение, износ и т.п. ШВП хуже переносит опилки,пыль и отсутствие смазки, чем передача винт-гайка, при попадании инородного тела даже очень малого размера передача может подклинивать, т.к. соседние шарики в канале вращаются в противоположном направлении.
Зубчатая передачаЗубчатые передачи, применяемые в станках с ЧПУ, бывают 2 видов
Ременная передача Зубчатая ременная передача Ременная передача используется в тех случаях, когда масса движимой части невелика. Зубчатый ремень растягивается вдоль оси и фиксируется по концам специальными пластиками. Зубчатый шкив надевается непосредственно на вал двигателя, закрепленного на движимой части(портале), плотных обхват шкива ремнем обеспечивается натяжными роликами, которые обычно изготавливаются из подходящих по размеру радиальных шарикоподшипников. Главный минус ременной передачи - свойства ремня. Несмотря на то, что все приводные ремни армированы стальным или стекловолоконным кордом, это не спасает его от растяжения, и чем длиннее ремень, тем сильней он будет тянуться. Чем сильнее тянется ремень, тем меньше точность и ниже частота собственных колебаний - передача может попадать в мощнейший резонанс на самых необходимых частотах перемещений. Этот эффект можно снизить, закрепив отрезок ремня на станке зубцами вверх, и наложив на него зубец-в зубец еще один ремень, приподняв петлю, в которую размещается шкив. Как видно из схемы, растяжению подвергается его незначительный по длине отрезок, что нивелирует указанные выше недостатки. Ременная передача дает мягкое движение, если нет резонанса, в отличие от ШВП практически не боится пыли и стружки, а также позволяет регулировать натяг ремня для выборки люфта, из-за чего в первом приближении зачастую ременные редукторы рассматриваются как безлюфтовые. Ремни используются, как правило, там, где нет высоких требований по точности и мала масса портала и нагрузка на рабочий инструмент - раскроечные станки плазменной резки, пенорезки.
Зубчатая рейка
Зубчатая реечная передачаСтальная зубчатая рейка используется на широкоформатных раскроечных станках плазменной и лазерной резки, портальных фрезерных станках широкого формата, форматно-раскроечных станках, где использование ШВП невозможно по причине провисания винта, а также где нужна высокая скорость перемещения
6 Разработка кинематических схем приводов технологических машин, установление их коэффициента качества. Разработка кинематической схемы привода модуля выполняется на основе его структуры, составленной с учетом требуемых функциональных подсистем, выбранных технических характеристик и принятой компоновки. В частности, наличие подсистемы ИС – изменения скорости в процессе обработки обусловливает необходимость разработки автоматического привода модуля с бесступенчатым регулированием частот вращения шпинделя. Такой привод также необходим для многоцелевого станка в целях обеспечения его повышенных технологических возможностей. Приводы с бесступенчатым регулированием в распространенных станках с ЧПУ содержат регулируемые электродвигатели и переборные коробки. В качестве двигателяей применяются электродвигатели постоянного тока или асинхронные с частотным регулированием. Переборная коробка в таком приводе служит для расширения диапазона регулирования частот вращения шпинделя RэР, осуществляемого с постоянной мощностью. С целью уменьшения количества ступеней переборной коробки целесообразно применение электродвигателя с увеличенным диапазоном регулирования RэР. В ряде случаев это может достигаться за счет выбора электродвигателя с повышенной мощностью. Для такого двигателя при определенной номинальной частоте вращения соответственно коэффициенту повышения мощности увеличивается диапазон регулирования RэР. На рис. 2 в качества примера приведены графики изменения мощности электродвигателя и мощности на шпинделе в зависимости от частоты вращения. Вариант б) отличается от варианта а) применением электродвигателя с повышенной мощностью и более простой переборной коробки с меньшим количеством ступеней. Более рациональное использование диапазона регулирования RэР такого электродвигателя может быть достигнуто, если наряду с повышением мощности увеличивается номинальная частота вращения его вала. В связи с тем, что повышение мощности электродвигателя может отразиться на увеличении стоимости модуля, выбор варианта привода должен сопровождаться технико-экономическим обоснованием. Разработка кинематической схемы привода главного движения модуля со ступенчатым регулированием проводится в последовательности [9]: - выбор структурной формулы привода; - составление принципиальной кинематической схемы; - построение структурной сетки; - построение графика частот вращения валов; - расчет частных передаточных отношений ременных и зубчатых передач; - определение диаметров шкивов и чисел зубьев колес; - проверка кинематического расчета. При разработке кинематической схемы привода главного движения модуля с бесступенчатым регулированием частот вращения шпинделя необходимо предварительно определить параметры переборной коробки – знаменатель регулирования пк и количество ступеней частот вращения zпк, а также уточнить используемые наибольшую и наименьшую частоты вращения вала электродвигателя [7, 9]. Выбор варианта структурной формулы привода следует проводить с учетом использования методов улучшения кинематики приводов станков, предусматривающих применение коробок со сложенной структурой, с частичным совпадением скоростей и со связанными зубчатыми колесами [1, 7, 9]. Для предварительно определенных вариантов структурных формул нужно построить принципиальные кинематические схемы, структурные сетки и графики частот вращения валов. На основании этого определяются обобщенные показатели вариантов привода и осуществляется выбор рационального варианта. Пример разработки кинематической схемы модуля привода главного движения с бесступенчатым регулированием частот вращения шпинделя
8 Классификация электроприводов. Уравнения моментов поступательного и вращательного движения двигателя и исполнительного механизма технологических машин.Электроприводы обычно классифицируются по виду движения и управляемости, по способу передачи энергии и по другим критериям.
По виду движения все электроприводы могут быть вращательного и поступательного однонаправленного или реверсивного движения. В отдельную группу выделяют устройства возвратно-поступательного движения. В зависимости от механического передаточного устройства выделяют:
редукторный электропривод, который содержит один из видов механического передаточного устройства;
безредукторный, двигатель которого соединен непосредственно с исполнительным органом.
По принципу регулирования скорости электроприводы бывают регулируемые и нерегулируемые. По положению исполнительного органа они могут быть:
следящими, которые воспроизводят перемещение исполнительного органа в соответствии с произвольно меняющимся задающим сигналом;
программно-управляемые, обеспечивающие перемещение исполнительного органа согласно заданной программе;
адаптивные, которые обеспечивают автоматически оптимальный режим движения при изменении условий его работы;
позиционные, регулирующие положение исполнительного органа рабочей машины.
Передача механической энергииПо способу передачи механической энергии исполнительному органу электроприводы бывают групповые, взаимосвязанные и индивидуальные. Групповые электроприводы устроены так, что от одного двигателя через трансмиссию приводится в движение сразу несколько исполнительных органов рабочих машин. Такой электропривод является неэкономичным, его эксплуатация и автоматизация технологических процессов усложнены. По этим причинам это устройство практически не применяется в настоящее время, оно уступило место взаимосвязанным и индивидуальным приводам.Взаимосвязанный электропривод состоит из двух или более индивидуальных приводов, электрически или механически связанных между собой. Такое устройство может применяться по технологическим и конструктивным соображениям. Примером такого механизма является привод длинного цепного или ленточного конвейера и т.п.Каждый исполнительный орган рабочей машины индивидуального электропривода приводится в движение своим отдельным двигателем. В настоящее время индивидуальный электропривод широко применяется в различных машинах и оборудовании.Еще один важный критерий, по которому классифицируются электроприводы – это уровень автоматизации. Они могут быть:
неавтоматизированные;
автоматизированные;
автоматические
Чаще всего используется последние два типа, так как они наиболее просты в эксплуатации, надежны и долговечны. Существуют и другие разновидности электроприводов, но представленная классификация является стандартной, так что стоит выбирать устройство согласно этим критериям.
9 Статистическая устойчивость электропривода. Механические характеристики электродвигателя и исполнительного органа технологической машины.
Статическая устойчивость электропривода, то есть устойчивость его в установившихся режимах работы зависит от взаимного расположения механических характеристик двигателя и рабочей машины, от величины коэффициентов жесткостиβД и βC этих характеристик.
Условием статической устойчивости электропривода является: βД-βC<0 илиβД<βC, где βД и βC – соответственно жесткости механических характеристик двигателя и исполнительного органа
Докажите,
что при соблюдении условия βc>βд в![]() ЭП присутствует статическая устойчивость.
ЭП присутствует статическая устойчивость.
Рассмотрим работу механической части электропривода с позиций теории автоматического управления. Уравнение движения электропривода - это дифференциальное уравнение первого порядка:где р - оператор дифференцирования по времени. Из него следует, что:
![]()
Дифференцируя это соотношение по ω, получим:
![]()
![]()
Из
этого выражения следует, что корень
дифференциального уравнения![]() будет
отрицательным (р<0), то есть система
электропривода будет устойчива лишь
при условии, что β-βC<0,
то есть когда β<βC.
будет
отрицательным (р<0), то есть система
электропривода будет устойчива лишь
при условии, что β-βC<0,
то есть когда β<βC.
Выполняется ли в точке «А» условие статической устойчивости, докажите результат.
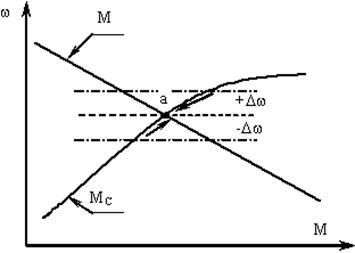

При увеличении скорости (то есть при +Δω>0) ΔМ<ΔМС, ΔMJ<0, dω/dt<0, электропривод начинает замедляться, стремясь уменьшить скорость и вернуться в устойчивое состояние (точку A). При уменьшении скорости (то есть при -Δω<0) ΔМ>ΔМС, ΔMJ>0, dω/dt>0, электропривод будет ускоряться, стремясь увеличить скорость и вернуться в устойчивое состояние (точку A). Таким образом, сочетание характеристик ω=f(М) и МС=f(ω), показанное на рисунке, соответствует состоянию статической устойчивости электропривода.
10 Выбор системы электроснабжения приводов и типов электродвигателей, способов регулирования их скоростей для различных технологических машин.
Электродвигатель должен наиболее полно отвечать технико-экономическим требованиям, т. е. отличаться простотой конструкции, надежностью в эксплуатации, наименьшей стоимостью, небольшими габаритами и массой, обеспечивать простое управление, удовлетворять особенности технологического процесса и иметь высокие энергетические показатели при различных режимах работы.
Выбор электродвигателей для нерегулируемых приводов малой и средней мощности
В нерегулируемых приводах малой и средней мощности используют в большинстве случаев трехфазные асинхронные двигатели с короткозамкнутым ротором, конструктивное исполнение которого согласуют с необходимыми пусковыми условиями производственного агрегата. Если эти двигатели не могут обеспечить условия пуска, применяют трехфазные асинхронные двигатели с фазным ротором, благодаря которому можно не только получить увеличенный начальный пусковой момент, но и добиться его снижения до заданного значения.
Выбор электродвигателя по номинальной частоте вращения
При выборе номинальной частоты вращения двигателя следует исходить из того, что при всех прочих равных условиях двигатели повышенной быстроходности имеют меньшие габариты, массу, стоимость и отличаются более высокими энергетическими показателями, чем аналогичные им тихоходные. Однако слишком высокая быстроходность вынуждает вводить сложное передаточное устройство между валами двигателя и рабочей машины, в результате чего преимущества быстроходного двигателя могут свестись на нет.
Окончательный вариант привода рабочей машины с малогабаритным быстроходным двигателем и достаточно сложным передаточным устройством или с тихоходным двигателем, отличающимся повышенными габаритами, соединенным с рабочей машиной муфтой, выбирают в результате технико-экономического расчета и сопоставлений обоих вариантов с учетом удобства монтажа, ухода и эксплуатации производственного агрегата.
Выбор электродвигателей для установок с необходимостью регулирования частоты вращения
В случае необходимости регулирования частоты вращения механизма в широком диапазоне могут использоваться двигатели постоянного тока, сервоприводы и асинхронные электродвигатели с короткозамкнутым ротором, работающие в комплекте с частотными преобразователями.
Электродвигатели постоянного тока применяют в тех приводах, где требуется большой диапазон регулирования скорости, большая точность поддержания скорости вращения привода, регулирования скорости вверх от номинальной.
Сейчас, электроприводы с двигателями постоянного тока постепенно вытесняются асинхронными частотно-регулируемыми электроприводами. Преобразователи частоты позволяют широко применять регулируемые асинхронные электроприводы там, где раньше применялись нерегулируемые электроприводы или регулируемые электроприводы постоянного тока.
Регулируемые привода с асинхронными двигателями позволяют снизить эксплуатационные затраты, повысить перегрузочную способность, надежность и снизить требования к среде эксплуатации.
Сервопривод - это система привода, которая в широком диапазоне регулирования скорости обеспечивает динамичные, высокоточные процессы и обеспечивает хорошую их повторяемость. Это система, предназначенная для отработки момента, скорости и позиции с заданной точностью и динамикой. Классический сервопривод состоит из двигателя, датчика позиции и системы управления, имеющей три контура регулирования (по позиции, скорости и тока).
В настоящее время, сервоприводы применяются там, где недостаточно точности регулирования обычных общепромышленных преобразователей частоты. Применение высококачественных сервоприводов необходимо в высокопроизводительном оборудовании, где главным критерием является производительность.
Выбор конструкции электродвигателя
Конструкцию двигателя выбирают, исходя из условий окружающей среды с учетом особенностей соединения двигателя с рабочей машиной. Основное внимание при этом уделяют защите обмоток и токопроводящих частей двигателя от вредных воздействий окружающей среды в связи с наличием пыли, влаги, едких паров, высокой температуры, а также взрывоопасных смесей, когда необходимо предусматривать соответствующие меры защиты самой среды от взрыва, обусловливаемого искрообразованием в машине. Предприятия-изготовители выпускают открытые, защищенные и закрытые двигатели.
Выбор формы исполнения электродвигателя
Форма исполнения двигателя определяется положением вала и формой его свободного конца, числом и родом подшипников, способом установки и крепления машины и т. п. В большинстве случаев применяют двигатели с горизонтальным валом, лежащим в двух подшипниках, укрепленных в щитах двигателя, и лапами для его крепления, иногда используют фланцевые двигатели, у которых на одном из щитов имеется фланец для крепления к рабочей машине, а также встраиваемые двигатели, которые непосредственно встраивают в рабочую машину, образуя с ней единый производственный агрегат.