

Методические рекомендации
Исходные данные для моделирования звена УО-АП берутся из работы №1. Скорость цели выбирается из условия Vc 0.5Vyo.

В зависимости от исходных данных следует произвести настройку контура путем экспериментального подбора коэффициентов. В качестве начальных значений коэффициентов рекомендуются следующие:
N0 = 3 – навигационная константа;
Kiz = 10 – статический коэффициент передачи измерительного звена;
Kzvk = 1 – коэффициент передачи звена выработки команд;
Коэффициенты, указанные цифрами, не изменяются.
В результате выполнения работы исследуется промах УО при различных ракурсах стрельбы и перегрузках цели. Промахом следует считать минимальное значение расстояния УО-цель r, фиксируемое первым лучом осциллографа.
Вторым лучом фиксируется перегрузка УО, которая не должна превышать 20 ед. В случае превышения указанной величины следует уменьшить уровень ограничения угла отклонения рулей (блок Saturation).
По третьему лучу осциллографа контролируется угол линии визирования. Контроль угла дает наглядное представление о траектории УО.
Ограничение перегрузки УО достигается введением ограничения угла отклонения рулей в блоке Saturation.
Порядок выполнения работы
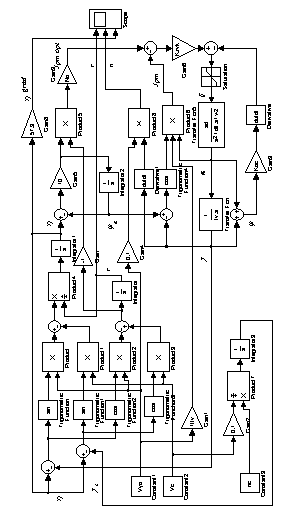
Собрать схему рис.4.4 в среде Simulink. Задать начальные значения коэффициентов в соответствии с методическими рекомендациями. Задать начальное значение дальности в блоке Integranor1 r = 20000.
Задать значение перегрузки цели n=0. Начальное значение курсового угла цели в блоке Integranor3 задать 1 (w 600). Провести на этом режиме отладку модели путем последовательной модификации коэффициентов, отмеченных буквенными символами (за исключением коэффициентов УО).
Последовательно задавая перегрузку цели до 7 ед., снять зависимость r= f(n). Снять аналогичные зависимости при начальном ракурсе пуска (0, 30, 90, 120, 150, 180)0.
Построить семейство зависимостей r= f(n) для различных ракурсов пуска.
Требования к отчету
Отчет по лабораторной работе должен содержать:
титульный лист, содержащий название предмета, номер и название работы, фамилии студента и преподавателя;
цель работы;
схему моделирования с указанием всех коэффициентов передаточных функций;
- результаты моделирования по методу погони при с = 600;
- графики зависимостей r = f(c) для методов погони и прямого наведения.
Контрольные вопросы
Принципы работы систем самонаведения. Разновидности систем самонаведения;
Методы наведения для систем самонаведения;
Состав контура наведения для метода пропорциональной навигации и назначение основных звеньев;
Модель измерительного звена;
Модель звена формирования команд для метода пропорциональной навигации;
Модель кинематического звена.
Особенности поведения УО при наведении по методу пропорцииональной навигации.
Литература
Вейцель В.А. Радиосистемы управления. – М.: Дрофа, 2005.
Быков А.В. Моделирование и эффективность радиосистем управления. Курс лекций, 2009.
Черных И.В. SIMULINK. Среда для создания инженерных приложений. – М: ДИАЛОГ-МИФИ, 2004.