

Содержание
Введение…………………………………………………………………………4
1. Выбор электродвигателя, кинематический и силовой расчет привода…...5
2. Выбор марки материалов, определение допускаемых напряжений………9
3. Определение параметров передачи, сил в зацеплении, проверка прочности зубьев………………………………………………………………………………..11
4. Предварительный расчет валов редуктора………………………………….16
5. Определение конструктивных размеров шестерни и колеса, элементов корпуса и крышки редуктора………………………………………………………………..18
6. Расчет ременной передачи…………………………………………………...19
7. Эскизная компоновка редуктора (первый этап)……………………………..25
8. Подбор подшипников качения………………………………..………………28
9. Подбор и проверочный расчет шпоночных соединений……………………29
10. Проверочный расчет ведомого вала на усталость………………………….30
11. Эскизная компоновка редуктора (второй этап)…………………………….37
12. Выбор посадок сопрягаемых деталей……………………………………….38
13. Выбор смазки. Смазка зацепления и подшипников. Выбор сорта масла...39
14. Сборка редуктора……………………………………………………………..40
15. Список литературы…………………………………………………………...41
Введение
Редуктором называется механизм, состоящий из зубчатых или червячных передач, выполненных в виде отдельного агрегата и служащий для передачи сращения от двигателя к валу рабочей машины. Кинематическая схема привода может включать, помимо редуктора, открытые зубчатые передачи, цепные или ременные передачи.
Назначение редуктора - понижение угловой скорости и соответственно повышение вращающего момента ведомого вала по сравнению с ведущим.
Редуктор состоит из корпуса, в котором помещают элементы передачи -губчатые колёса, валы, подшипники и т. д. В отдельных случаях в корпусе редуктора размещают также устройства для смазывания зацеплений и подшипников или устройств для охлаждения.
Редукторы классифицируются по следующим основным признакам: типу передачи (зубчатые, червячные или зубчаточервячные); числу ступеней (одноступенчатые, двухступенчатые и т.д.); типу зубчатых колёс (цилиндрические, конические, коническо-цилиндрические и т.д.); относительному расположению валов в пространстве (горизонтальные, вертикальные); особенностям кинематической схемы (развёрнутая, соосная, с раздвоенной ступенью и т.д.).
Данный для расчета редуктор является горизонтальным, одноступенчатым, цилиндрическим, косозубым.
Кинематический и силовой расчет привода





3
5
4
2
1
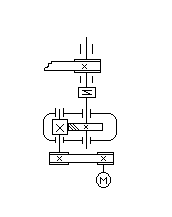
Рисунок 1.1. Кинематическая схема привода:
1 – Электродвигатель;
2 – Соединительная муфта;
3 – Цилиндрический прямозубый редуктор;
4 –Ременная передача;
5 – Ленточный транспортер;
I – Ведущий вал редуктора;
II – Ведомый вал редуктора;
III – Ведущий вал транспортера.
Р3 = 3,2 кВт; η = 160 об/мин
Требуемая мощность электродвигателя.
Рэтр =
 ,
(1.1)
,
(1.1)
Где Р3 -полезная ведущем валу транспортёра мощность на
η0 - общий КПД привода.
η0=η1∙η2∙η3∙η43, (1.2)
где η1=0,97 – КПД ременной передачи;
η2=0,96– КПД редуктора;
η3=0,98– КПД соединительной муфты;
η4= 0,99– КПД одной пары подшипников.
Значения КПД принимаем из таблицы 1.1 (1)
η0 = 0,97∙0,96∙0,98∙0,993 = 0,89; (1.3)
Следовательно требуемая мощность будет равна:
Рэтр =
 = 3,596 кВт; (1.4)
= 3,596 кВт; (1.4)
По таблице П1 (1) принимаем трёхфазный электродвигатель по ГОСТ 19523-81, техническая характеристика которого приводится в таблице 1.1
-
Условное обозначение
P кВт
n, об/мин
S,%
dВ, мм
ЧА100L4У3
4,0
1500
4,7
28
Номинальная частота вращения вала электродвигателя
nн
= nc∙(1- );
(1.5)
);
(1.5)
nн=
1500∙(1- )
=1429,5об/мин;
)
=1429,5об/мин;
Передаточное отношение привода:
u0
=
 (1.6)
(1.6)
u0
=
 = 8,93;
= 8,93;
Принимаем по ГОСТ 2185-66 передаточное число редуктора Uред=4, тогда передаточное число отношения ременной передачи
Uрем=
 =
=
 =
2,23 (1.7)
=
2,23 (1.7)
Получим значение Uрем находится в доступных пределах (2 < [Uрем] < 4)
Определяем кинематические и силовые параметры привода: мощность, частоту вращения, угловую скорость и вращающий момент.
Вал электродвигателя:
Рэдв = 3,596кВт; (1.8)
η = 1429,5 об/мин (1.9)
эдв =
 ;
(1.10)
;
(1.10)
эдв =
 = 149,6 рад/с,
= 149,6 рад/с,
Т =
 ;
(1.11)
;
(1.11)
Тэ =
 =
24 Н ∙ м,
=
24 Н ∙ м,
Ведущий вал редуктора:
Р1 = Рэтр∙η1∙η4 (1.12)
Р1 = 3,596∙0,97∙0,99 = 3,453 кВт;
n1
=
 = 640 об/мин; (1.13)
= 640 об/мин; (1.13)
1= = 67.1 рад/с; (1.14)
= 67.1 рад/с; (1.14)
Т1 =
 ;
(1.15)
;
(1.15)
Т1=
 =
51.4 Н∙м;
=
51.4 Н∙м;
Ведомый вал редуктора:
Р2 = Р1∙η2∙η4; (1.16)
Р2 = 3,453∙0,96∙0,99 = 3,284 кВт ;
η2 =
 ;
(1.17)
;
(1.17)
η2=
 = 160 об/мин ;
= 160 об/мин ;
2 =
 ;
(1.18)
;
(1.18)
2 =
 =
16,7 рад/с ;
=
16,7 рад/с ;
Т2 =
 ;
(1.19)
;
(1.19)
Т2=
 = 196.6 Н∙м ;
= 196.6 Н∙м ;
Ведущий вал транспортера:
Р3 = Р2∙η3∙η4, (1.20)
Р3= 3,284∙0,98∙0,99 = 3,2 кВт
η3 =
 ;
(1.21)
;
(1.21)
η3 =160 об/мин
3
=
 ;
(1.22)
;
(1.22)
3 = 16,7рад/с;
Т3 =
 ;
(1.23)
;
(1.23)
Т3 =
 =
191,6 Н∙м
=
191,6 Н∙м
Полученные результаты сводим в таблицу 1.2.
Таблица 1.1. Кинематические и силовые параметры на валах привода
Наименование вала |
Р, кВт |
n, об/мин |
, рад/с |
Т, Н∙мм |
Вал электродвигателя |
3,596 |
1429,5 |
149,6 |
24 |
Вал I |
3,453 |
640 |
67,1 |
51,4 |
Вал II |
3,284 |
160 |
16,7 |
196,6 |
Вал III |
3,2 |
160 |
16,7 |
191,6 |