Раздел 3. Силовой анализ механизма
Цели кинетостатического анализа:
определение силы полезного сопротивления в рассматриваемых положениях механизма;
определение реакций в кинематических парах;
определение уравновешивающей силы
3.1. Силовой расчет методом планов
Силовой расчет методом планов позволяет определить реакции в кинематических парах и уравновешивающий момент. Этот метод прост, нагляден и достаточно точен для инженерных расчетов.
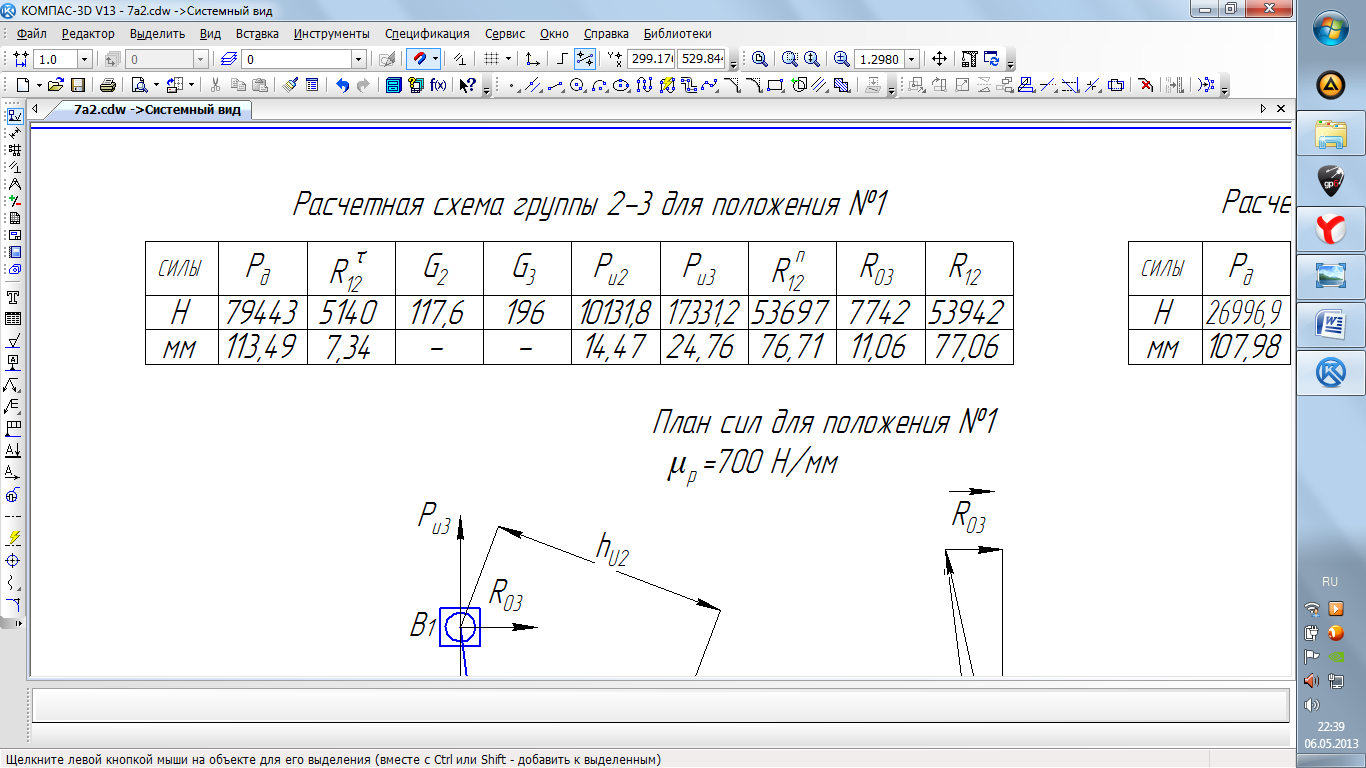
3.1.1. Определение силы полезного сопротивления Построение разметки механизма и силовой диаграммы.
Порядок построения разметки для силового расчета механизма не отличается от её построения в разделе кинематического анализа, поэтому здесь каких-либо дополнительных пояснений не требуется. После построения разметки переходим к силовой диаграмме, которую необходимо перенести из исходных данных на лист. При этом важно определить величины сил сопротивления в каждом положении разметки и установить их соответствие этим положениям. На разметке механизма имеются отметки положения точки В ползуна. Направим ось ординат искомого графика параллельно траектории точки В от её нулевого положения в сторону другого крайнего положения. Перпендикулярно этой оси направим ось абсцисс. При этом по оси ординат, по существу, откладывается перемещение точки В, по оси абсцисс так же, как и на исходном графике, откладывается отношение силы сопротивления Р к ее максимальной величине Рmax.
В выбранной системе координат необходимо вдоль обеих осей нанести шкалы и затем координатную сетку точно так же, как это сделано на исходном графике в задании на курсовой проект. Прочитав координаты ряда характерных точек исходного графика, строим эти точки в приготовленной для этого системе координат, а затем соединяем нанесенные точки последовательно друг с другом, что и дает искомый график.
Опустив перпендикуляры из отметок траектории на ось ординат графика, получаем абсциссы отношения Р/Рmax в нужных положениях разметки рабочего хода механизма. Отметим, что масштаб по оси ординат графика равен масштабу разметки, а по оси абсцисс масштаб роли не играет, так как на ней отмечается отношение сил, а не величина силы.
Найдем движущую силу газа Ргаз:
Для 1 положения:
Ргаз = (Р/Рmax)1·Рmax· (π·d2/4) = 1*3500000*(3.14*0.172/4) =79443,0 Н,
Для 2 положения:
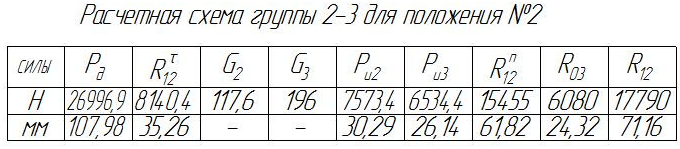
Ргаз = (Р/Рmax)2 ·Рmax· (π·d2/4) = 0.34*3500000*(3.14*0.172/4) =26996,9 Н,
Для 4 положения:
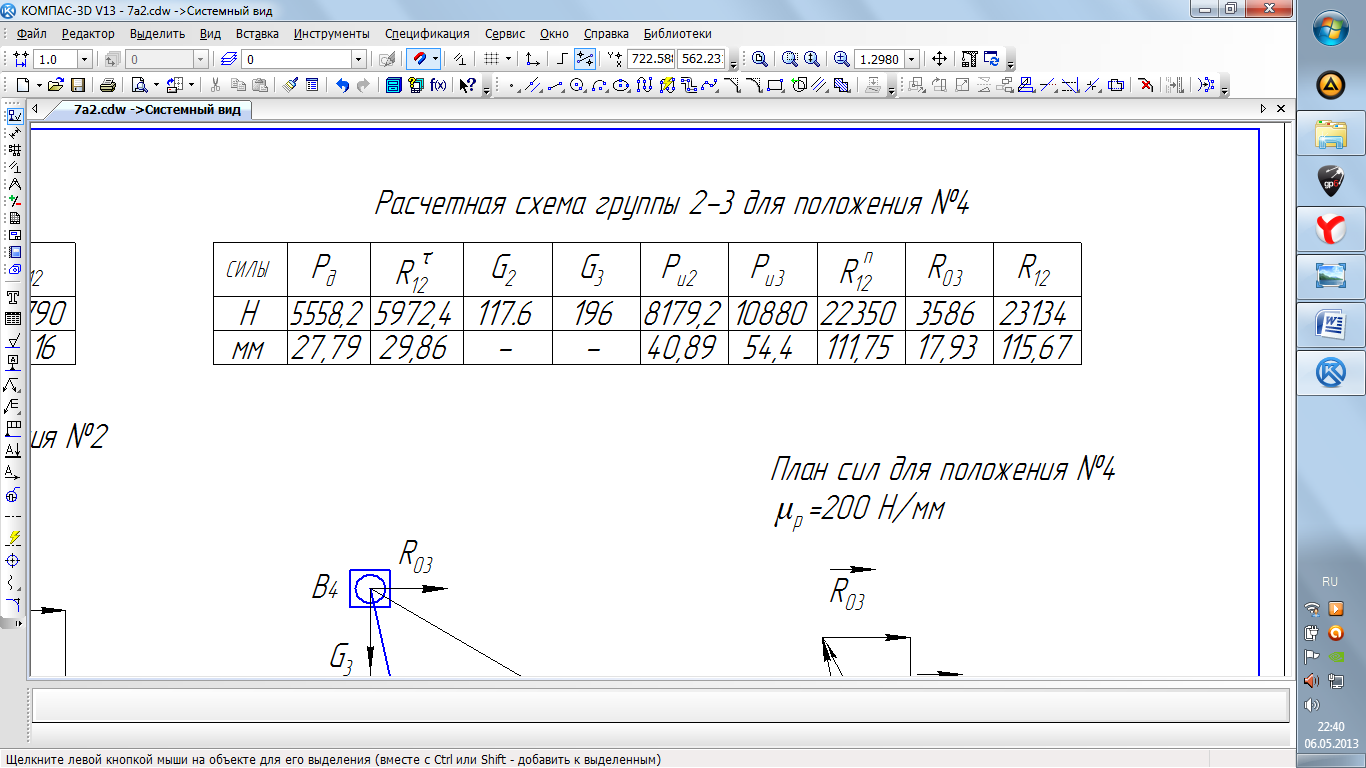
Ргаз = (Р/Рmax)4·Рmax· (π·d2/4) = 0.07*3500000*(3.14*0.172/4) = 5558,2 Н,
3.1.2. Силовой расчет структурной группы.
Перенесем
звено АВ с разметки механизма и в точке
А освободим его от связей, отбросив
звено 1 и заменив действие этого звена
реакцией
 ,
которое, в свою очередь, имеет нормальную
,
которое, в свою очередь, имеет нормальную
 и тангенциальную
и тангенциальную
 составляющие.
составляющие.
К звеньям группы прикладываем силы тяжести, инерции, полезного сопротивления, реакции связей. На схеме нагружения (рис. 3.1.1) силы изображаем отрезками произвольной величины, но строго выдерживая направления этих сил. Силы инерции направляем в сторону противоположные ускорению соответствующих точек.
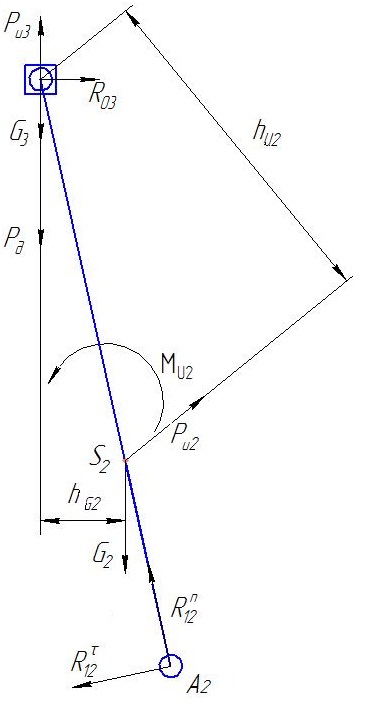
Рис. 3.1.1. Схема нагружения группы для положения№2
Определим силу инерции ползуна в положении №1:
 ,
(3.1)
,
(3.1)
где
 кг-масса поршня
кг-масса поршня
 Н.
Н.
Силы инерции звена АВ:
где
 кг-масса шатуна
кг-масса шатуна
 ,
(3.2)
,
(3.2)

Сила веса поршня определяется по формуле:
где кг-масса поршня

Сила веса шатуна определяется по формуле:
где кг-масса шатуна

Момент
 – направлен в сторону противоположную
угловому ускорению.
– направлен в сторону противоположную
угловому ускорению.
Запишем сумму моментов относительно ползуна В.
 .
(3.3)
.
(3.3)
Плечи моментов определим по формулам:

 ,
,
Из
уравнения (3.3) выразим
 :
:

Определим силу инерции ползуна в положении№2:
, (3.1)
где кг-масса поршня
 Н.
Н.
Силы инерции звена АВ:
где кг-масса шатуна
, (3.2)

Сила веса поршня определяется по формуле:
где кг-масса поршня
Сила веса шатуна определяется по формуле:
где кг-масса шатуна
Момент
 – направлен в сторону противоположную
угловому ускорению.
– направлен в сторону противоположную
угловому ускорению.
Запишем сумму моментов относительно ползуна В.
. (3.3)
Плечи моментов определим по формулам:

 ,
,
Из уравнения (3.3) выразим :

Определим силу инерции ползуна в положении №4:
, (3.1)
где кг-масса поршня
 Н.
Н.
Силы инерции звена АВ:
где кг-масса шатуна
, (3.2)

Сила веса поршня определяется по формуле:
где кг-масса поршня
Сила веса шатуна определяется по формуле:
где кг-масса шатуна
Момент
 – направлен в сторону противоположную
угловому ускорению.
– направлен в сторону противоположную
угловому ускорению.
Запишем сумму моментов относительно ползуна В.
. (3.3)
Плечи моментов определим по формулам:
 ,
,
Из уравнения (3.3) выразим :

Запишем сумму всех сил, действующих на группу:
 .
(3.5)
.
(3.5)
Решим
уравнение (3.5) графически (рис. 3.1.2).
Выберем масштабный коэффициент
 .
Выбираем полюс через который проводим
прямую параллельную Рдавл
со
схемы нагружения и откладываем на ней
отрезок, изображающий Рдавл
. Последовательно строим вектора всех
сил в соответствии с уравнением (3.5) так,
чтобы неизвестные реакции
и
.
Выбираем полюс через который проводим
прямую параллельную Рдавл
со
схемы нагружения и откладываем на ней
отрезок, изображающий Рдавл
. Последовательно строим вектора всех
сил в соответствии с уравнением (3.5) так,
чтобы неизвестные реакции
и
 строились в последнюю очередь. Пересечение
линий действия этих двух векторов дадут
решение данного уравнения. На рис. 3.1.2
представлен план сил для группы в
положении №2 механизма.
строились в последнюю очередь. Пересечение
линий действия этих двух векторов дадут
решение данного уравнения. На рис. 3.1.2
представлен план сил для группы в
положении №2 механизма.

Рис. 3.1.2. План сил для структурной группы
Для определения численных значений неизвестных реакций и необходимо измерить отрезки, которыми обозначаются данные реакции на плане сил и
умножить
их на масштабный коэффициент
 .
.
Полученные значения вычислений и построений заносим в таблицу