

3.2. Особенности структурного представления объекта в двухконтурной системе
Многоконтурные системы управления применяются для объектов, осуществляющих преобразование и переработку потоков энергии или вещества в технологических процессах. Часто эти объекты имеют вид емкостей. Добавочные переменные состояния определяют состояние отдельных емкостей или их групп, цель их введение – локализация действия возмущений, нарушающих течение технологического процесса в этих объектах.
Введение добавочных вспомогательных переменных состояния является целесообразным, когда сильные возмущения действуют в начальных по ходу технологического процесса ёмкостях или входят в объект по одному каналу с регулирующим воздействием. В подобных случаях оказывается достаточным введение одной вспомогательной переменной состояния, измеренной в относительной близости от регулирующего органа.
Это позволяет разбить объект на два участка: малоинерционный и инерционный.
Малоинерционный участок ещё называют опережающим, так как изменение добавочной переменной состояния опережает изменение основной управляемой величины. Пример структурной схемы после применения приёма разделения объекта на два участка приведен на рисунке 3.3.
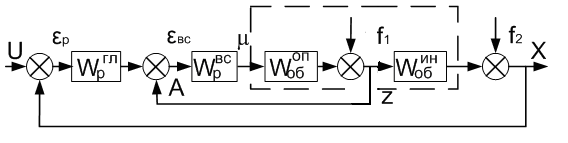
Рисунок 3.3. – Структурная схема двухконтурной системы с объектом из двух участков
На
рисунке 3.3 объект представлен
последовательным соединением опережающего
участка с передаточной функцией
![]() (s)
и инерционного участка с передаточной
функцией
(s)
и инерционного участка с передаточной
функцией
![]() (s).
(s).
Возмущения
![]() (t)
заменены двумя эквивалентными
(t)
заменены двумя эквивалентными
![]() (t)
и
(t)
и
![]() (t)
Возмущение
(t)
действует на опережающий участок
объекта, имеет смысл эффекта действия
всех возмущений этого участка, возмущения
(t)
Возмущение
(t)
действует на опережающий участок
объекта, имеет смысл эффекта действия
всех возмущений этого участка, возмущения
![]() (t)
— всех возмущений, приложенных к
инерционной части объекта.
(t)
— всех возмущений, приложенных к
инерционной части объекта.
3.3. Расчёт оптимальных настроек регуляторов в двухконтурной системе с единичными обратными связями
Если
точка отбора добавочной переменной
состояния z(t)
расположена относительно близко к
регулирующему органу, так что инерционность
опережающей части объекта значительно
меньше инерционности второй части
объекта, то коэффициент передачи
вспомогательного регулятора может быть
установлен относительно большим, в
пределе его можно считать
![]() .
Тогда передаточная функция участка с
локальной обратной может быть представлена
как:
.
Тогда передаточная функция участка с
локальной обратной может быть представлена
как:

При таких допущениях структурная схема двухконтурной системы становится одноконтурной и расчету подлежат настройки главного регулятора (рисунок 3.4).

Рисунок 3.4. – Структурная схема эквивалентной одноконтурной системы для расчета настроек главного регулятора
Оптимальные настройки главного регулятора находятся любым известным способом.
Для расчета настроек вспомогательного регулятора структурную схему размыкают в точке А (рисунок 3.3).

Рисунок 3.5. – Структурная схема для расчёта настроек вспомогательного регулятора
Настройки вспомогательного регулятора находят любым известным способом, при этом передаточная функция разомкнутой системы имеет вид:
![]()
В передаточной функции главного регулятора используются параметры (коэффициент усиления, постоянные времени), найденные выше в предположении, что .
После того, как были найдены настройки вспомогательного регулятора, уточняются настройки главного регулятора. Для этого используется структурная схема (рисунок 3.3), передаточная функция разомкнутой системы имеет вид:
 .
.