

2.4.7. Расчет настроек непрерывного пи-регулятора в пакете «Matlab»
Решение
задачи, приведенной выше, в пакете
«Matlab»
значительно облегчает нахождение
оптимальных настроек регулятора,
упрощает построение характеристик
системы, нахождение прямых и косвенных
показателей качества. Задав нужные
передаточные функции и параметры в
М-файле приложения, можно избежать
многократного повторения операций, что
сведет все расчеты к заданию искомых
![]() ,
,![]() и выполнению одной единственной команды
по реализации М-файла.
и выполнению одной единственной команды
по реализации М-файла.
Для
решения данного примера в пакете «Matlab»
сначала необходимо задать исходные
передаточные функции
![]() и
и
![]() .
.
Передаточная функция объекта имеет вид:
![]() .
.
Можно задать каждое из звеньев функции, а затем осуществить их последовательное и параллельное соединение при помощи команд ‘series’ и ‘parallel’ . Для задания передаточной функции используется синтаксис:
Wob =tf ([15],[24 11 1]).
Аналогично
в M-файле
MatLab’а
нужно задать и передаточную функцию
ПИ-регулятора
![]() .
.
Wpi=tf([Kr*Ti Kr],[Ti 0])
Передаточная
функция разомкнутой системы имеет вид:
![]() .
В М-файле осуществляется последовательное
соединение заданных ранее
.
В М-файле осуществляется последовательное
соединение заданных ранее
![]() и
и![]() :
:
Wr=series(Wob,Wpi)
Далее необходимо произвольно задать промежуток изменения частоты. В М-файле промежуток задается следующим образом: W=Wmin:h:Wmax, где Wmin и Wmax – границы промежутка, а h – шаг варьирования (выбирается произвольно, для достижения оптимальной точности вычислений берется в сотых или тысячных долях от граничных значений):
W=0:0,001:1000
Далее необходимо построить АФЧХ найденной передаточной функции разомкнутой системы при помощи команды «nyquist», и, удержав полученный график при помощи команды «hold», построить поверх окружность с найденным радиусом и координатами центра (для этой операции следует воспользоваться уже другой командой – «plot»). В комплексной плоскости окружность задается следующим образом:
 ,
где Y
– функция окружности, X
– варьируемая переменная,
,
где Y
– функция окружности, X
– варьируемая переменная,
![]() и
и
![]() - смещение центра по оси абсцисс и ординат
соответственно.
- смещение центра по оси абсцисс и ординат
соответственно.
В М-файле:
x=-10:0.001:0
nyquist(Wr,W)
hold
R=3,172
Plot(R*((cos(x)-3,71/R)+i*sin(x)))
Задав все команды в М-файл, необходимо сохранить его под именем команды, которой впоследствии можно будет реализовать все внесенные в него операции. Сделать это можно в меню «Отладка» в строке команд, выбрав «Сохранить и запустить».
Далее, задавая в командной строке Tи и варьируя Kр, нужно запускать М-файл, набирая его имя в командной строке. В результате будут получены изображения АФЧХ и окружности. Уменьшением или увеличением Kр добиваемся, чтобы АФЧХ коснулась окружности. Необходимо помнить, что перед тем, как задать новые значения Tи или Kр, нужно закрывать окно графического редактора. Фиксируя значения, при которых произошло касание, заполняем таблицу (таблица 2.9). Например Tи=30, Kр=1,2. Запустив М-файл, получаем изображение:
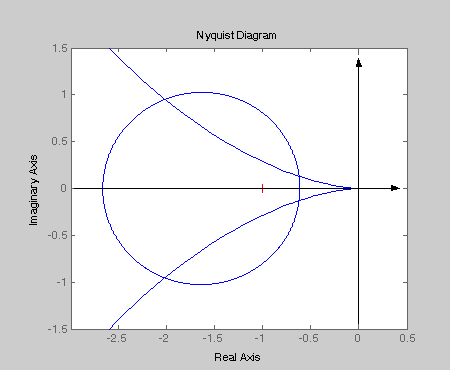
Т.к. АФЧХ пересекает окружность, уменьшаем . Если не касается, то увеличиваем до тех пор, пока АФЧХ и окружность будут иметь только одну общую точку.
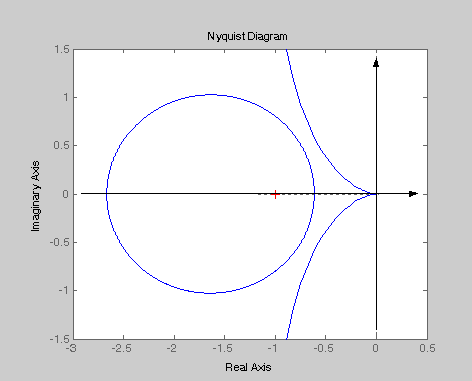
Касание
АФЧХ и окружности происходит при
![]() .
.
Найденное Kр заносится в таблицу (таблица 2.9).
Аналогично
найдены все остальные значения
и
![]() таблицы 2.9.
таблицы 2.9.
Таким
образом, максимальное
![]() ,
при
,
при
![]() и
и
![]() .
.
При
помощи команды «feedback»
замыкаем единичную обратную связь
параллельно
![]() и строим график АЧХ:
и строим график АЧХ:
Wz=feedback(Wr,1)
ffplot(Wz)
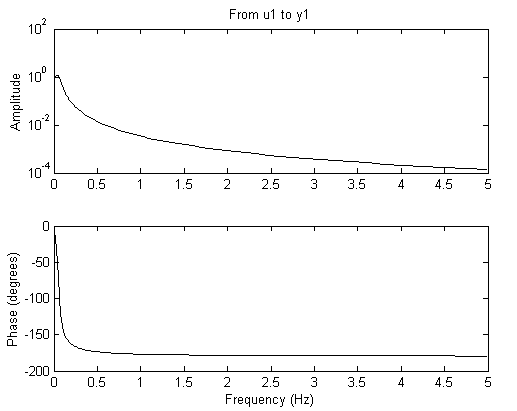
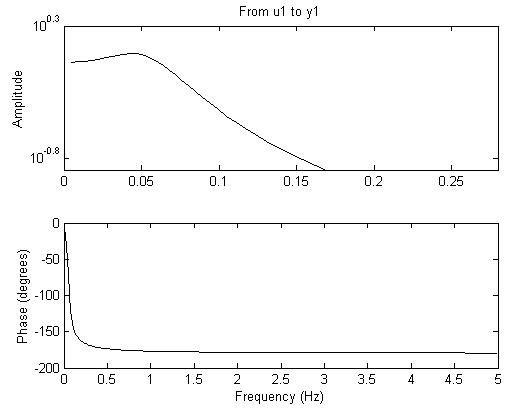
Увеличив изображение, находим максимальное значение:
Затем при помощи команды «step» строится реакция на единичное ступенчатое воздействие:
step(Wz)
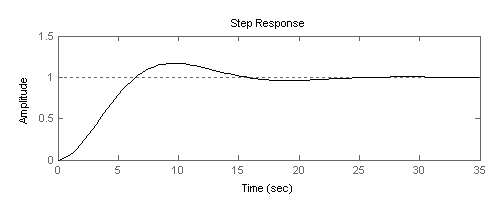
Прямые показатели качества при найденных оптимальных настройках равны:

Т. к. полученные показатели качества не выходят за пределы заданных, расчет можно считать удовлетворительным.