

2.2. Расчет регуляторов по кривой отклика
2.1.1. Кривая отклика – реакция системы (изменение выходной величины) на некоторое ступенчатое изменение входной величины.
2.1.2. Получение кривой отклика
а) фиксируется установившееся значение входной и выходной величины (u0; x0);
б) в момент времени t0 изменяется значение u0 на 10–20% от u0, т.е. новое значение устанавливается скачком
(1,1–1,2) u0 = u1;
в) после окончания переходного процесса измеряется x1.
2.2.3. Получение характеристик по кривой отклика
а) строится касательная с наибольшим углом наклона;
б) определяется время t2 пресечения этой касательной и линии x1;
в) вычисляются параметры:
![]() ;
0
= t1–t0;
(2.3)
;
0
= t1–t0;
(2.3)
![]() ,
где t1
– момент времени, в который выходная
величина начинает отслеживать изменение
управления, приложенное в момент t0
(t1>t0),
по кривой отклика определяют как точку
пересечения касательной и оси абсцисс,
t2
– значение времени, при котором
касательная пересекает линию
установившегося значения x1
(рисунок 2.3).
,
где t1
– момент времени, в который выходная
величина начинает отслеживать изменение
управления, приложенное в момент t0
(t1>t0),
по кривой отклика определяют как точку
пересечения касательной и оси абсцисс,
t2
– значение времени, при котором
касательная пересекает линию
установившегося значения x1
(рисунок 2.3).
Замечание.
В п. 2.2.3 коэффициент передачи
![]() вычислен в абсолютных
единицах, он может быть вычислен в
безразмерном виде:
вычислен в абсолютных
единицах, он может быть вычислен в
безразмерном виде:
 .
(2.4)
.
(2.4)
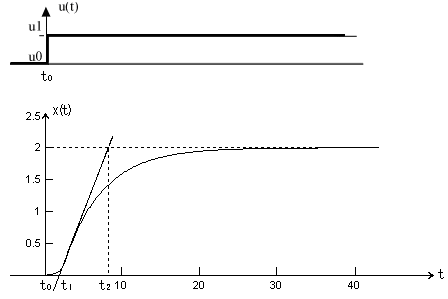
Рисунок 2.3. – Реакция объекта на ступеньку или кривая отклика системы
2.2.4. Алгоритм расчета настроек Зиглера-Никольса по кривой отклика
Задаются определенной скоростью затухания переходного процесса x(t), т.е. коэффициентом демпфирования χ
 ;
в данном методе ее принимают равной
четырем.
;
в данном методе ее принимают равной
четырем.Настройки рассчитывают по таблице 2.2.
Таблица 2.2 – Настройки Зиглера – Никольса по кривой отклика
Закон |
k |
Tu |
Tд |
П |
|
- |
- |
ПИ |
|
30 |
- |
ПИД |
|
20 |
0,50 |
2.2.5. Настройки регулятора по методу Коэна-Куна по кривой отклика
Таблица 2.3 – Настройки Коэна–Куна по кривой отклика
Закон |
k |
Tu |
Tд |
П |
|
- |
- |
ПИ |
|
|
- |
ПИД |
|
|
|
Замечание:
Перерегулирование и время регулирования
в системе в значительной степени зависят
от отношения
![]() ,
чем оно меньше, тем больше
и tp.
,
чем оно меньше, тем больше
и tp.
Пример 2.2. Подобрать настройки ПИ и ПИД регуляторов по кривой отклика, заданной на рисунке 2.4, методом Зиглера – Никольса и Коэна – Куна, если u0 = 5; u1 = 7; объект задан передаточной функцией
![]() .
.
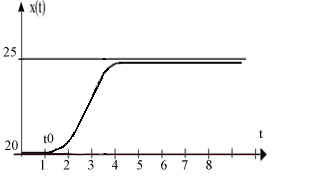
Рисунок 2.4. – Кривая отклика к примеру; t0 = 1
Построить переходные характеристики, определить и сравнить прямые показатели качества.
Решение. Строим касательную с наибольшим наклоном;
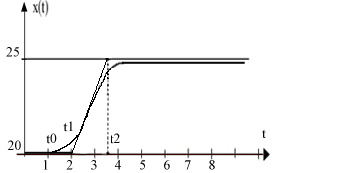
Определим характеристики:
t0 = 1 (время начала движения x(t));
t1 = 2;
t2 = 3,6;
х0 = 20; х1 = 25;
![]() ;
;
0 = t1– t0 = 1;
T0 =υ= t2 – t1 = 3,6 – 2 = 1,6;
Рассчитываем настройки ПИ регулятора по таблице 2.2 (Зиглера – Никольса):
![]() ;
;
TПИ1 =3·1=3с.
Тогда передаточная функция ПИ – регулятора имеет вид
![]() .
.
По таблице 2.3 (Коэна – Куна)
![]() ;
;
![]() .
.
Передаточная функция ПИ – регулятора по методу Коэна – Куна имеет вид
![]() .
.
Передаточная функция разомкнутой системы для первого регулятора имеет вид
![]() .
.
Передаточная функция замкнутой системы
![]() .
.
Изображение переходной характеристики
![]() .
.
Переходная характеристика вычисляется
![]() .
.
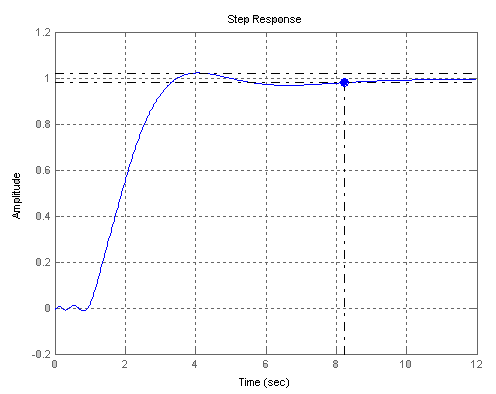
Рисунок 2.5 – Переходная характеристика системы с настройками ПИ – регулятора, подобранными методом Зиглера – Никольса
График приведен на рисунке 2.5, перерегулирование
ПИ1= 6%, время регулирования tpПИ1= 8,2с.
Передаточная функция разомкнутой системы с ПИ – регулятором (настройки Коэна – Куна) имеет вид:
![]() ,
,
тогда передаточная функция замкнутой системы
![]() ;
;
![]() ;
;
график приведен на рисунке 2.6.
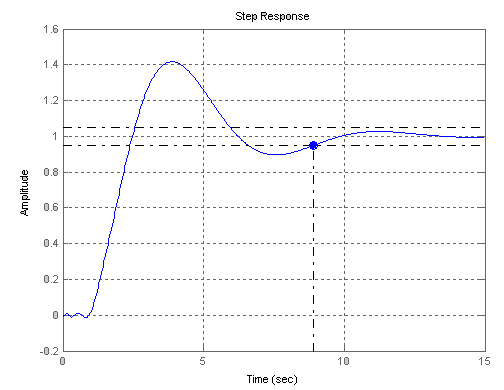
Рисунок 2.6. – Переходная характеристика системы с настройками ПИ – регулятора подобранными методом Коэна – Куна
Перерегулирование в этом случае составило:
ПИ2= 42%, время регулирования tpПИ2= 5,65с.
На основе таблиц 2.2 и 2.3 можно рассчитать настройки и других типов регуляторов (П и ПИД).
2.2.6. Решение примера по расчету настроек ПИ-регулятора в командном интерфейсе MatLab
Задание передаточной функции объекта
 в командной строке MatLab
можно осуществить следующим образом:
в командной строке MatLab
можно осуществить следующим образом:
>> Wobj=tf([2.5],[1.6 1],'inputdelay',1)
Задание передаточной функции регулятора с найденными по таблице настройками (метод Зиглера-Никольса):
piregZ_N=tf([0.576*3 1],[3 0])
3) Передаточная функция разомкнутой системы рассчитывается с учетом последовательного соединения командой «series»:
Z_Nrazomk=series(piregZ_N,Wobj)
а) Передаточную функция замкнутой рассчитывается с помощью команды «feedback»:
Z_Nzamk=feedback(Z_Nrazomk,1)
б) Реакция на единичное воздействие получается командой «step» (рисунок 2.9):
>> step(Z_Nzamk),grid
С помощью правой кнопки мышки можно выбрать интересующие нас характеристики.
г) Для построения АЧХ системы используется команда «ffplot» (рисунок 2.7).
>> ffplot(Z_Nzamk)
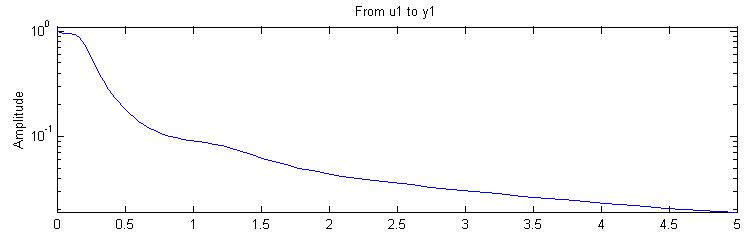
Рисунок 2.7. – АЧХ замкнутой системы: ПИ – регулятор (метод Зиглера – Никольса)
Масштаб можно изменить при помощи пункта Свойства (Properties) контекстного меню, вызываемого щелчком правой кнопкой мыши по изображению графика.
![]() .
.
Остальные расчеты проводятся аналогично.