

V2: Тема 2.4. Автоматическое регулирование и регуляторы.
S: Управлением называется … для выполнения каких либо целей.
Совокупность операций.
Совокупность команд
Совокупность приказов
Совокупность указаний
S: Система автоматического управления это
совокупность человека и машины
совокупность человека и контроллера
совокупность объекта управления и управляющего устройства
совокупность ЭВМ и человека
S: Установите соответствие обратной связи и ее действия
L1: внутренняя обратная связь
L2: внешняя обратная связь
L3: отрицательная обратная связь
L4: положительная обратная связь
L5:
R1: соединяет выход одного элемента системы с его входом
R2: соединяет выход системы с ее входом
R3: ослабляет действие входной величины на выходную
R4: усиливает действие входной величины на выходную
R5: не оказывает действия на вход
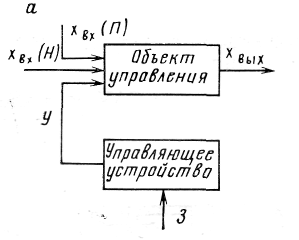
S: На рисунке представлена САУ
замкнутая по отклонению
разомкнутая с жесткой программой
разомкнутая с управлением по возмущению
замкнутая комбинированная
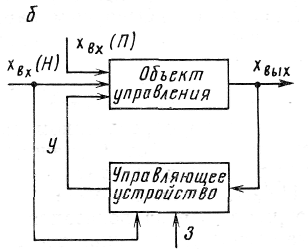
S: На рисунке представлена САУ
замкнутая по отклонению
разомкнутая с жесткой программой
разомкнутая с управлением по возмущению
замкнутая комбинированная
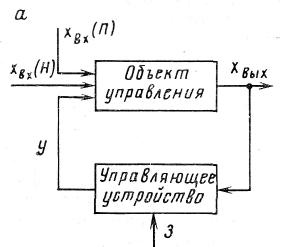
S: На рисунке представлена САУ
замкнутая по отклонению
разомкнутая с жесткой программой
разомкнутая с управлением по возмущению
замкнутая комбинированная
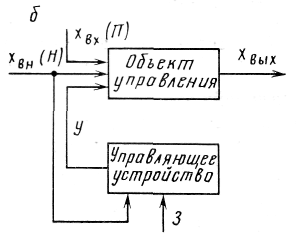
S: На рисунке представлена САУ
замкнутая по отклонению
разомкнутая с жесткой программой
разомкнутая с управлением по возмущению
замкнутая комбинированная
S: Автоматический регулятор включает в себя
датчик
задатчик
преобразователь
регулирующее устройство
формирующее устройство
исполнительное устройство
S: Установите соответствие между видом системы и изменением значения регулируемого параметра
L1: в системах с автоматической стабилизацией
L2: в следящих системах
L3: в системах программного регулирования
L4:
R1: является величиной постоянной
R2: изменяется в зависимости от другого параметра
R3: изменяется по заранее установленной программе
R4: является величиной дискретной
S: К САР предъявляются требования
устойчивость
надежность
экономичность
заданное качество
S: Установите соответствие
L1: текущее значение регулируемого параметра равно заданному
L2: текущее значение регулируемого параметра неравно заданному
L3:
R1: САР находится в состоянии равновесия
R2: САР находится в переходном режиме
R3: САР находится в режиме колебания
S: Графиком переходного процесса называется зависимость
выходной величины от входной
выходной величины от задания
входной величины от задания
выходной величины от времени
S: Система считается устойчивой, если регулируемая величина
всегда равна заданной
после отклонения возвращается к заданному значению
после отклонения не возвращается к заданному значению
после отклонения может вернуться, а может и не вернуться к заданному значению
S: Зависимость выходной величины от входной в установившемся режиме называется
динамической характеристикой
переходным процессом
статической характеристикой
устойчивой характеристикой
S: Характер изменения выходной величины в переходном режиме определяется
динамической характеристикой
переходным процессом
статической характеристикой
устойчивой характеристикой
S: Графическое изменение выходного сигнала элемента САР при его
переходе из одного установившегося режима в другое при типовом
входном воздействии называется
временной характеристикой
частотной характеристикой
переходной характеристикой
амплитудной характеристикой
S: Графическое изображение изменения выходного сигнала элемента САР
при его переходе из одного установившегося режима в другое при
единичном ступенчатом изменении входного сигнала называется
временной характеристикой
частотной характеристикой
переходной характеристикой
амплитудной характеристикой
S: Установите соответствие типа регулятора и его достоинства
L1: передача сигналов на большие расстояния, простота энергоснабжения
L2: большая мощность исполнительного механизма в небольших габаритах
L3: взрывопожаробезопасность, высокая скорость и надежность исполнительного механизма
L4:
R1: электрические
R2: гидравлические
R3: пневматические
R4 : комбинированные
S: В нефтяной и газовой промышленности наиболее распространены регуляторы
электрические
пневматические
гидравлические
комбинированные
S: Для регулирования конкретного параметра в определенных условиях предназначены регуляторы
комбинированные
универсальные
индивидуальные
специальные
S: Для автоматического регулирования различных технологических процессов предназначены регуляторы
комбинированные
универсальные
индивидуальные
специальные
S: Закон регулирования – это … свойство регулятора
статическое
математическое
динамическое
кинематическое
S: Отношение изображения выходной величины САР к изображению входной называется
динамической функцией
передаточной функцией
статической функцией
устойчивой функцией
S: Установите соответствие между типом регулятора и его передаточной функцией
L1: П
L2: И
L3: ПИ
L4: ПД
L5: ПИД
R1:
![]()
R2:
![]()
R3:
![]()
R4
:
![]()
R4
:
![]()
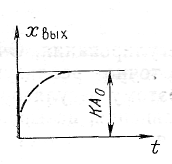
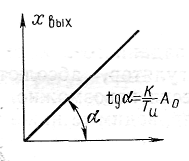
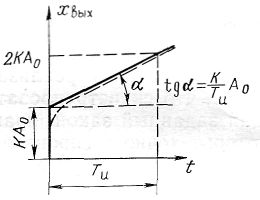
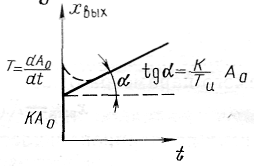
S: Установите соответствие между типом регулятора и графиком его временной характеристики функцией
L1: П
L2: И
L3: ПИ
L4: ПД
L5: ПИД
R1:
R2:
R3:
R4
:

R5:
S: С помощью ### - регулятора можно осуществлять любой закон регулирования
S: Настроечный(ые) параметр(ы) П-регулятора
коэффициент усиления -К
постоянная времени – Т
время изодрома – Ти
время предварения - Тд
S: Настроечный(ые) параметр(ы) И-регулятора
коэффициент усиления -К
постоянная времени – Т
время изодрома – Ти
время предварения - Тд
S: Настроечный(ые) параметр(ы) ПИ-регулятора
коэффициент усиления -К
постоянная времени – Т
время изодрома – Ти
время предварения - Тд
S: Настроечный(ые) параметр(ы) ПД-регулятора
коэффициент усиления -К
постоянная времени – Т
время изодрома – Ти
время предварения - Тд
S: Регулятор Р25 реализует закон регулирования
П
И
ПИ
ПД
ПИД
S: Приборы Р25 работают в комплекте с
дифференциально-трансформаторными датчиками
индуктивными датчиками
термосопротивлениями
термоэлектрическими термометрами
пневматическими преобразователями
унифицированными токовыми преобразователями
S: Прибор Р25 содержит
измерительный блок
суммирующий блок
регулирующий блок
преобразовательный блок
S: Измерительный блок прибора Р25 включает в себя:
схему сравнения
сумматор
суммирующий усилитель
операционный усилитель обратной связи
нормирующий операционный усилитель
стабилизированный источник напряжения постоянного тока
апериодическое звено блока отрицательной обратной связи
S: Регулирующий блок прибора Р25 включает в себя:
схему сравнения
сумматор
суммирующий усилитель
операционный усилитель обратной связи
нормирующий операционный усилитель
стабилизированный источник напряжения постоянного тока
апериодическое звено блока отрицательной обратной связи
S: На передней панели каркаса прибора Р25 расположены
задатчик
светодиоды
индикатор положения рабочего органа исполнительного механизма
переключатель режима работы прибора
переключатель управления "А"-"Р" (ручное, автоматическое)
переключатель "Р" (▲ - больше, ▼ - меньше)