

83Основные свойства моно- и бинокулярного зрения
Монокулярное зрение – зрение одним глазом.
Объемность предметов и их пространственное расположение непосредственно могут восприниматься как при монокулярном зрении (одним глазом), так и при бинокулярном (двумя глазами). В первом случае главную роль играют физиологические факторы (зрительная память, ощущение различия в напряжении мышц при аккомодации и т.п.). Опираться на эти факторы при построении телевизионной системы, где глаз заменяется передающей трубкой, нельзя – необходимо прибегнуть к использованию свойств бинокулярного зрения, где основную роль играет глазной базис – расстояние между зрительными осями при рассмотрении удаленных предметов (рис.). Для разных людей он немного отличается, но в среднем составляет 65 мм. Угол a при пересечении зрительных осей называется углом конвергенции (сведения в одну точку). Каждому положению объекта соответствует определенный угол конвергенции, что сопровождается некоторой мускульной работой поворота глаз вокруг центров вращения. Сравнение в сознании мускульных напряжений, связанных с изменением угла конвергенции, дает представление о том, ближе или дальше расположен предмет.
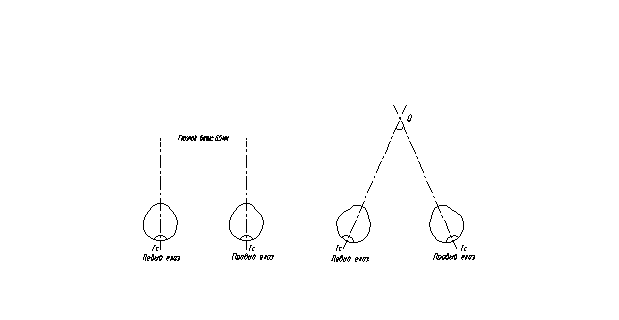
Рисунок. Бинокулярное наблюдение одиночных предметов
При смещении рассматриваемого объекта происходит не только конвергенция глаза, но и аккомодация, то есть изменение кривизны глазного хрусталика. Последнее обеспечивает резкость изображения предметов на сетчатке при различных расстояниях их от глаза.
Достаточно малейшего смещения одной из проекций изображений с идентичных точек сетчатки, как в сознании возникает пространственное представление о рассматриваемых объектах. Принято, что невооруженным глазом рельефность предметов можно наблюдать на расстояниях, не превышающих одного километра. Для увеличения стереоскопической дальности или повышения стереоэффекта требуется, прежде всего, при прочих равных условиях, увеличение базиса наблюдения, что легко осуществить в телевидении путем разноса передающих трубок.
84Геометрические свойства аэрофотоснимка
В отличие от картографич изображ-й, к-рые получаются ортогональным проектир-ем ситуации на плоскость относимости с последующим развертыванием «картинки» в плоскость в любой картографич проекции, снимки являются центральным проектированием местности на плоскость. Таким образом снимки получаются во внешней перспективной проекции, в связи с чем на реальных снимках возникают такие искажения, к-рые не свойственны карте. Поэтому преобразование снимков в карты составляет достаточно сложную задачу.
Снимок считается плановым, если угол наклона съемки не превышал 5 градусов.
85Измерение высот по аэрофотоснимкам, понятие об угловом и продольном параллаксе
Рассмотрим рис. S1 и S2 — центры проекции (объективы АФА в два момента съемки); В — базис съемки; b — базис съемки в масштабе снимка; Н — высота фотографирования; f — фокусное расст-е объектива АФА; о1 и о2 — центры левого и правого снимков; А —высота рельефа.
Параллаксом называют разность координат (абсцисс) одной и той же точки на разных снимках. На рис. параллакс точки a равен Ра = о1а1 + о2а2; Рс = о1с1 + о2с2 разность параллаксов ∆Р =Ра- Рс Разность параллаксов равна нулю, если точки лежат на одной гориз плоскости. Если же точки расположены с разностью высот h, то она может быть вычислена по формуле h = Н*∆P/(Ь + ∆P) или приближенно h = Н*∆P/Ь. Высота фотографирования Н измеряется в полете радиовысотомером для каждого снимка, b — на каждой паре снимков, ∆P — для каждой определяемой высоты с помощью специальных стереофотограмметрических приборов.