

§ 1.5. Радиус–вектор
Положение
точки А
на траектории в пространстве удобно
характеризовать радиус–вектором.
Для построения радиус-вектора выберем
неподвижную точку
Рис.
1.15![]() в евклидовом пространстве. Проведем
через неподвижную точку
произвольно ось
в евклидовом пространстве. Проведем
через неподвижную точку
произвольно ось
![]() .
Если каждому значению скалярного
аргумента t
поставить
в соответствие вектор
.
Если каждому значению скалярного
аргумента t
поставить
в соответствие вектор
![]() (расстояние между точкой
(расстояние между точкой
![]() на траектории и полюсом О
фиксируется
модулем
на траектории и полюсом О
фиксируется
модулем
![]() ,
направление прямой
,
направление прямой
![]() фиксируется углом
фиксируется углом
![]() )
то функция
будет называться радиус–вектором
скалярного аргумента (рис.
15, а). Если начало вектора
(рад
)
то функция
будет называться радиус–вектором
скалярного аргумента (рис.
15, а). Если начало вектора
(рад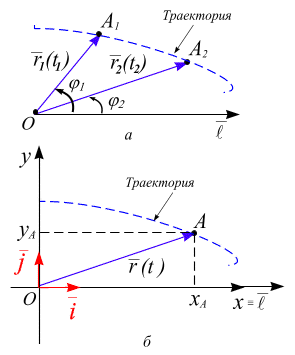
Пусть
точка движется в плоскости
![]() .
Совместим с точкой
начало плоской декартовой системы, а
ось
с осью
(рис. 1.15, б). В плоской декартовой системе
координат радиус–вектор
.
Совместим с точкой
начало плоской декартовой системы, а
ось
с осью
(рис. 1.15, б). В плоской декартовой системе
координат радиус–вектор
![]() раскладывается по базисным векторам
раскладывается по базисным векторам
![]() ,
,
![]() так (рис. 1.15, б)
так (рис. 1.15, б)
![]() ,
,
причем
компоненты
![]() являются координатами точки А в
прямоугольной системе координат.
являются координатами точки А в
прямоугольной системе координат.
Рис. 1.16 |
Радиус–вектор можно разложить по базисным векторам , , прямоугольной пространственной системы координат, то (рис.1.16)
причем
компоненты
|

§ 1.6. Основы математического анализа
Дифференцирование функций. Для решения многих задач требуется найти разность значений функции в двух точках. Так, средняя скорость материальной точки за промежуток времени Δt равна
![]() .
.
Если
рассматриваемое движение не является
равномерным, то чем меньше выбран
промежуток времени Δt,
тем лучше указанная формула будет
характеризовать движение точки. В идеале
мы получаем понятие мгновенной скорости
![]() :
это предел, к которому стремится средняя
скорость, когда
Δt
→ 0,
то есть
:
это предел, к которому стремится средняя
скорость, когда
Δt
→ 0,
то есть
![]()
Эта и другие задачи приводят к понятию производной.
Пусть
функция
![]() определена в некоторой окрестности
точки
определена в некоторой окрестности
точки
![]() и существует
и существует
![]() конечный предел отношения при
конечный предел отношения при
![]() .
Тогда этот предел называется производной
функции в точке
.
Тогда этот предел называется производной
функции в точке
![]()
![]() .
.
П
Рис.
1.17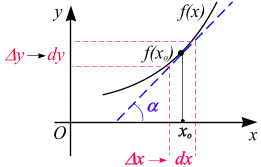
![]()
![]()
Геометрический
смысл производной.
Если
изображена своим графиком – кривой в
декартовых координатах (рис. 1.17), то
![]() .
где
.
где
![]() – угол между осью
и касательной к кривой в данной точке
,
отчитываемый от положительного
направления оси
против часовой стрелке. В механике
производную по времени t
часто обозначают точкой над функцией:
– угол между осью
и касательной к кривой в данной точке
,
отчитываемый от положительного
направления оси
против часовой стрелке. В механике
производную по времени t
часто обозначают точкой над функцией:
![]() .
.
Если приращение функции f(x0+Δx)–f(x0) обозначить как Δy, то определение можно записать так:
![]() .
.
Линейную
функцию
![]() называют дифференциалом функции f
в
точке
и обозначают df.
Для функции x
производная в каждой точке
равна 1, то есть
называют дифференциалом функции f
в
точке
и обозначают df.
Для функции x
производная в каждой точке
равна 1, то есть
![]()
Поэтому пишут:
![]() .
.
Геометрически
дифференциал функции
![]() – это приращение ординаты касательной
к графику функции в данной точке при
изменении абсциссы точки на dx
(рис.
1.17).
– это приращение ординаты касательной
к графику функции в данной точке при
изменении абсциссы точки на dx
(рис.
1.17).
Операция вычисления производной называется дифференцированием. Функция называется дифференцируемой в данной точке, если в этой точке существует ее производная.
Таблица производных:
1 |
|
7 |
|
13 |
|
2 |
|
8 |
|
14 |
|
3 |
|
9 |
|
15 |
|
4 |
|
10 |
|
16 |
|

Продолжение таблицы производных
5 |
|
11 |
|
17 |
|
6 |
|
12 |
|
18 |
|

Интегрирование
функций. Первообразной
функцией (или просто первообразной) для
данной функции одной переменной
,
определенной в некоторой области
![]() ,
называется такая функция
,
называется такая функция
![]() ,
определенная в той же области, производная
от которой равна
,
определенная в той же области, производная
от которой равна
![]() .
.
Геометрический
смысл первообразной. Если
данная функция
изображена кривой в декартовых
координатах, то первообразная численно
равна площади
![]() ,
ограниченной кривой
,
осью
и двумя ординатами: постоянной АВ
(при
,
ограниченной кривой
,
осью
и двумя ординатами: постоянной АВ
(при
![]() )
и переменной
)
и переменной
![]() (при абсциссе
(при абсциссе
![]() ).
Произвольно выбирая постоянную «а»,
получаем
различные первообразные. При этом
площадь
понимается в алгебраическом смысле
(рис. 1.18): площадь фигуры
).
Произвольно выбирая постоянную «а»,
получаем
различные первообразные. При этом
площадь
понимается в алгебраическом смысле
(рис. 1.18): площадь фигуры
А
Рис.
1.18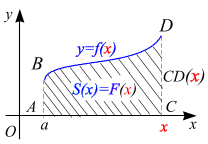
 .
.
Процесс нахождения первообразной называется интегрированием.
Интегрирование является операцией, обратной дифференцированию, чем помогает решать дифференциальные уравнения.