

§ 5. Сложное движение точки
Содержание. Основные понятия – абсолютное, относительное и переносное движения. Теорема о сложении скоростей. Сложение скоростей точки в общем случае переносного движения. Сложение ускорений точки в общем случае переносного движения. Ускорение Кориолиса. Правило Жуковского. Примеры.
§ 5.1 Основные понятия
Рис.5.1
![]() движется
по плоскому телу (S).
Свяжем с телом систему координат Охуz.
Пусть само тело (S)
движется относительно некоторой системы
координат
движется
по плоскому телу (S).
Свяжем с телом систему координат Охуz.
Пусть само тело (S)
движется относительно некоторой системы
координат
![]() ,
которую по отношению к наблюдателю
будем считать неподвижной (рис.
5.1). Тогда система отсчета Охуz
будет двигаться относительно
неподвижной системы
.
,
которую по отношению к наблюдателю
будем считать неподвижной (рис.
5.1). Тогда система отсчета Охуz
будет двигаться относительно
неподвижной системы
.
Рассмотрим
движение точки
по отношению к двум системам координат
– подвижной
и неподвижной.
Движение точки М
относительно подвижной системы отсчета
Охуz
называется
относительным.
Относительное движение точки может
быть прямолинейным или криволинейным.
Характеристики этого движения –
траектория, скорость, ускорение называются
относительными. Их отмечают индексом
r:
для относительной скорости –
![]() и
для относительного для ускорения –
и
для относительного для ускорения –
![]() .
.
Движение
точки М относительно неподвижной системы
отсчета О1х1у1z1
называется абсолютным
или сложным.
Траектория, скорость и ускорение точки,
относительно неподвижной системы
координат называются абсолютными.
Скорость и ускорение абсолютного
движения отмечают буквами
![]() и
и
![]() без
индексов.
без
индексов.
Переносным
движением
точки М
называют движение, которое она совершает
вместе с подвижной системой отсчета
как точка, жестко скрепленная с телом
(S)
в рассматриваемый момент времени.
Вследствие относительного движения
движущаяся точка М
в различные моменты времени совпадает
с различными точками тела (S).
Переносная скорость и переносное
ускорение точки совпадают со скоростью
и ускорением той точки тела (S),
в которой в заданный момент времени
находится движущаяся точка М.
Переносное движение отмечают индексом
е:
для скорости –
![]() ,
для ускорения –
,
для ускорения –
![]() .
.
§ 5.2. Абсолютная скорость точки
Пусть
заданы уравнения относительного движения
точки
,
т.е. заданы уравнения движения точки
относительно системы координат Охуz,
а также
заданы уравнения движения полюса
![]() тела (S)
и задано
вращение тела вокруг оси
тела (S)
и задано
вращение тела вокруг оси
![]() .
.
Теорема. Абсолютная скорость точки равна геометрической сумме ее относительной и переносной скоростей:
Рис. 5.2

![]() . (5.1)
. (5.1)
Доказательство.
Пусть точка М
движется по телу (S)
относительно подвижной системы координат
![]() .
Предположим, что центр подвижной системы
координат О
движется криволинейно относительно
неподвижной системы отсчета О1х1у1z1,
а оси координат Охуz
вращаются вместе с телом (S)
вокруг оси
с угловой скоростью
.
Предположим, что центр подвижной системы
координат О
движется криволинейно относительно
неподвижной системы отсчета О1х1у1z1,
а оси координат Охуz
вращаются вместе с телом (S)
вокруг оси
с угловой скоростью
![]() (рис. 5.2).
(рис. 5.2).
Абсолютное
движение точки
,
т.е. движение точки относительно
неподвижной системы координат О1х1у1z1,
зададим радиус–вектором
![]() ,
а относительное движения точки М,
т.е. движение
точки относительно подвижной системы
координат
определим
радиус – вектором
,
а относительное движения точки М,
т.е. движение
точки относительно подвижной системы
координат
определим
радиус – вектором
![]() .
Тогда
.
Тогда
![]() ,
(5.2)
,
(5.2)
здесь:
– ![]() ,
,
![]() – координаты точки М
относительно
неподвижной системы координат
О1х1у1z1;
– координаты точки М
относительно
неподвижной системы координат
О1х1у1z1;
![]() единичные
орты неподвижной системы координат;
единичные
орты неподвижной системы координат;
– ![]() ,
,
![]() – координаты полюса О
относительно неподвижной системы
координат
О1х1у1z1;
– координаты полюса О
относительно неподвижной системы
координат
О1х1у1z1;
– ![]() ,
x,
y,
z
– координаты
точки М
относительно подвижной системы координат
Оxyz,
,
x,
y,
z
– координаты
точки М
относительно подвижной системы координат
Оxyz,
![]() – единичные орты подвижной системы
координат.
– единичные орты подвижной системы
координат.
Абсолютная
скорость по определению равна
![]() .
Продифференцируем по времени векторное
равенство (5.2):
.
Продифференцируем по времени векторное
равенство (5.2):
![]()
![]() .
.
Вычислим
![]() :
:
 ,
(5.3)
,
(5.3)
здесь:
![]() – проекции вектора скорости полюса О
–
– проекции вектора скорости полюса О
–
![]() на
оси неподвижной системы координат.
на
оси неподвижной системы координат.
Вычислим
![]() (отметим,
что единичные орты подвижной системы
координат
–
функции времени):
(отметим,
что единичные орты подвижной системы
координат
–
функции времени):
 (5.4)
(5.4)
Здесь
![]() проекции скорости точки М
относительно подвижной системы координат,
т.е. проекции относительной скорости
точки М
проекции скорости точки М
относительно подвижной системы координат,
т.е. проекции относительной скорости
точки М
![]() .
.
Производные
по времени единичных векторов вычислим
по формуле Эйлера (![]() ):
):
![]() (5.5)
(5.5)
Перепишем (5.4) с учетом (5.5)
![]() (5.5’)
(5.5’)
итак,
![]() .
(5.6)
.
(5.6)
Таким образом, складывая (5.3) и (5.6), получим
![]() (5.7)
(5.7)
Первое
и третье слагаемы в (5.7) определяют
движение подвижной системы координат,
т.е. определяют скорость
переносного движения
точки М
–
![]() .
Следовательно, выражение (5.7) будет иметь
структуру формулы (5.1), т.е.
.
Следовательно, выражение (5.7) будет иметь
структуру формулы (5.1), т.е.
![]() .
.
Здесь:
![]() скорость
относительного движения.
скорость
относительного движения.
Скорость переносного движения выражается формулой
![]() (5.8)
(5.8)
Рассмотрим частные случаи вычисления переносной скорости.
Подвижная система координат вместе с телом
 движется поступательно со скоростью
движется поступательно со скоростью
 .
В этом случае
.
В этом случае
 =0
и, следовательно, согласно (5.8)
=0
и, следовательно, согласно (5.8)
![]()
![]() .
.
Переносная скорость совпадает со скоростью тела .Тогда абсолютна скорость
![]()
Подвижная система координат вместе с телом вращается вокруг неподвижной оси c угловой скоростью
 .
В этом случае
.
В этом случае
 ,
тогда переносная скорость, согласно
(5.8)
,
тогда переносная скорость, согласно
(5.8)
![]()
Переносная скорость не совпадает со скоростью тела .Тогда абсолютна скорость
![]()
П
Рис. 5.3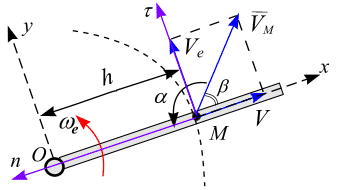
![]() вокруг
неподвижного центра
с
угловой скоростью
вокруг
неподвижного центра
с
угловой скоростью
![]() .
Точка М
скользит вдоль стержня со скоростью
.
Точка М
скользит вдоль стержня со скоростью![]() .
Вычислить абсолютную скорость точки
(рис.
5.3).
.
Вычислить абсолютную скорость точки
(рис.
5.3).
Решение.
Точка
участвует
в двух движениях: движется вдоль стержня
и, кроме того, вращается вместе со
стержнем. Свяжем подвижную систему
координат
с центром
(рис. 5.3). Движение точки
вдоль стержня (по оси
![]() )
будет относительным т.е.
)
будет относительным т.е.
![]() .За
время
.За
время
![]() точка пройдет по оси
путь
точка пройдет по оси
путь
![]() ,
равный
,
равный
![]()
Для
вычисления переносной скорости
![]() ,
жестко скрепим точку со стержнем на
расстоянии
от центра вращения
.
Приведем оси естественного трехгранника
,
жестко скрепим точку со стержнем на
расстоянии
от центра вращения
.
Приведем оси естественного трехгранника
![]() к точку
.
Тогда в переносном движении точка
будет
двигаться по окружности радиусом
со скоростью, равной
к точку
.
Тогда в переносном движении точка
будет
двигаться по окружности радиусом
со скоростью, равной
![]() .
.
Вектор
и
направлен по оси
![]() .
.
Так
как векторы
![]() и
и
![]() ортогональны, абсолютная скорость точки
будет
равна
ортогональны, абсолютная скорость точки
будет
равна
![]() .
.
Вычислим
угол между
![]() и осью
и осью
![]() :
:
![]() ,
,
![]() ,
,
![]() .
.
Пусть
![]() ,
,
![]() ,
,
![]() .
.
Тогда
![]() ;
;
![]() ,
,
![]() .
.
![]() ,
,
![]() ,
,
![]() .
.
Ответ. Абсолютная скорость точки равна
![]() ,
.
,
.