

3. Методика выполнения работы
3.1. Задание 1.
Исследование влияния различных типов регуляторов на качество переходных процессов.
3.1.1. Рассчитать значения параметров настройки И-, ПИ- и ПИД-регуляторов, используя формулы (8), (11), (14) и (16) в соответствии с числовыми значениями параметров передаточных функций объекта регулирования по заданному варианту (см. табл. 6.1.).
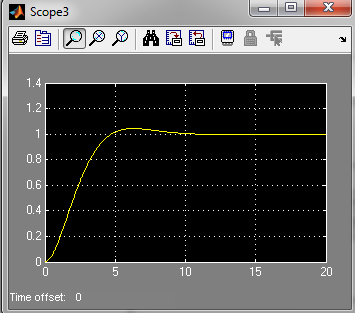
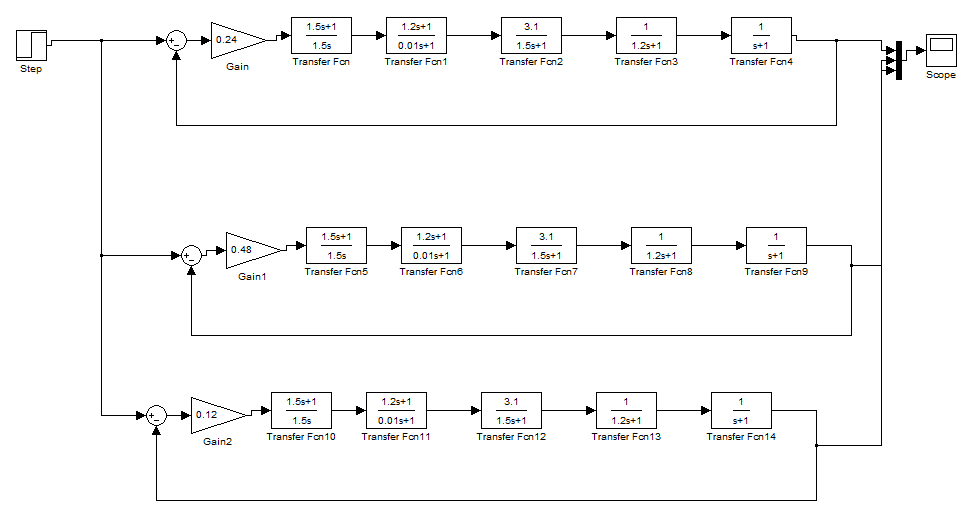
3.1.2. Построить переходные процессы замкнутой АСР при отработке единичных ступенчатых возмущающих воздействий U(t) для И-, ПИ- и ПИД-регуляторов с вычислением квадратичных интегральных оценок качества переходных процессов.
3.1.3. Определить прямые показатели качества полученных переходных процессов.
3.1.4. Построить переходные процессы в замкнутой АСР при отработке единичных ступенчатых возмущающих воздействий F(t) для И-, ПИ- и ПИД-регуляторов с вычислением квадратичных интегральных оценок.
3.1.5. Определить прямые показатели качества полученных переходных процессов.

3.2. Задание 2
Оценка влияния неточности определения параметров передаточной функции объекта регулирования на качество переходных процессов.
3.2.1. Исследовать влияние неточности определения параметров передаточной функции объекта регулирования на качество переходных процессов в АСР с ПИ-регулятором при отработке задающих воздействий.
Вариации настройки параметров ПИ-регуляторов приведены в таблице 6.2.
Таблица 6.2
-
Номера экспериментов
1
2
3
4
Кр, Ти
Кр, Ти
Кр, Ти
Кр, Ти
2Кр, Ти
Кр,2Ти
2Кр,2Ти
0.5Кр, 2Ти
0.5Кр, Ти
Кр, 0.5Ти
2Кр, 0.5Ти
0.5Кр, 0.5Ти
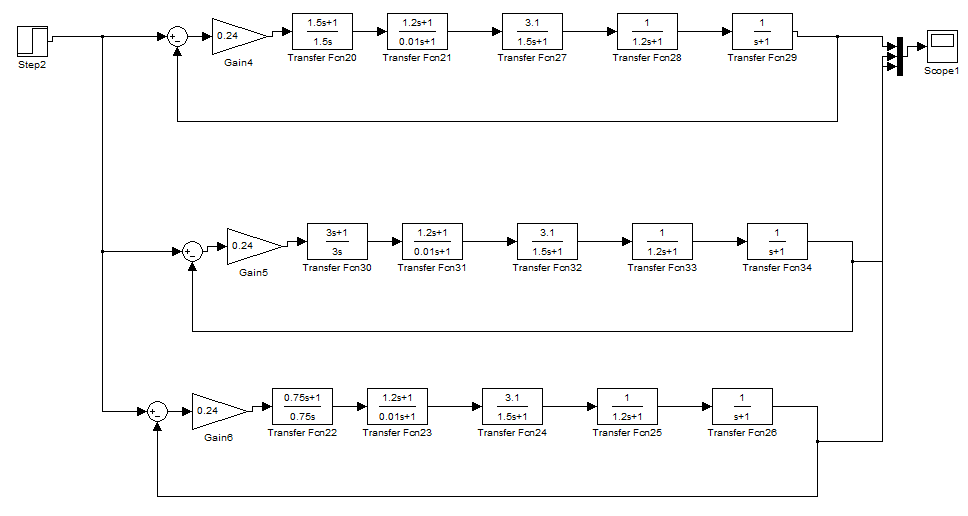
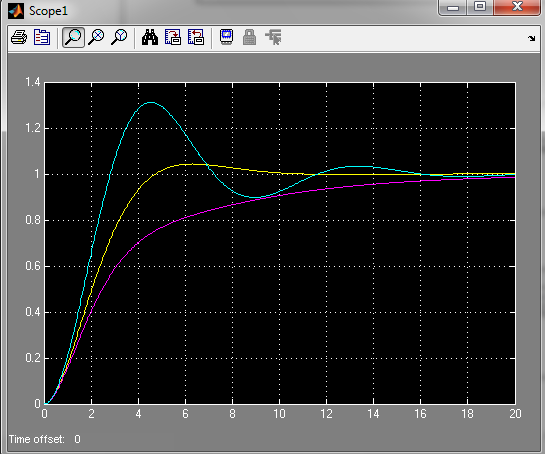
3.2.2. Построить переходные процессы в АСР при отработке задающих воздействий, соответствующие вариантам настроек ПИ-регулятора, приведенным в таблице 6.2. и определить их прямые показатели качества.
3.2.3. Выполнить анализ результатов численных экспериментов проведенных в п. 3.2.2.
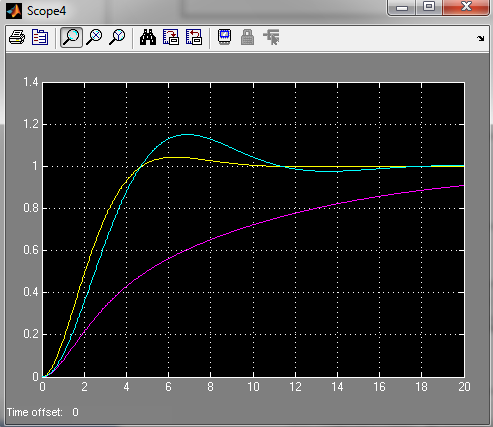
1.
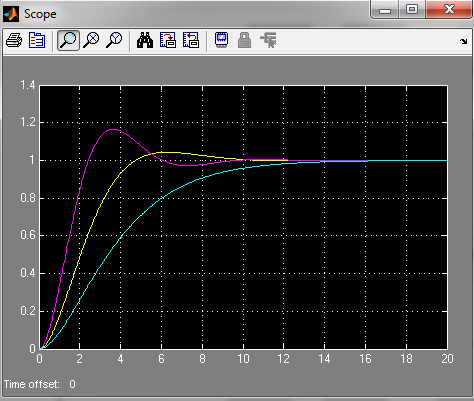
Синий график – нижняя модель, коэффициент пониженный.
Фиолетовый график – коэффициент повышенный.
2.
Фиолетовый график – нижняя модель (0.75)
Синий график – средняя модель.
3.
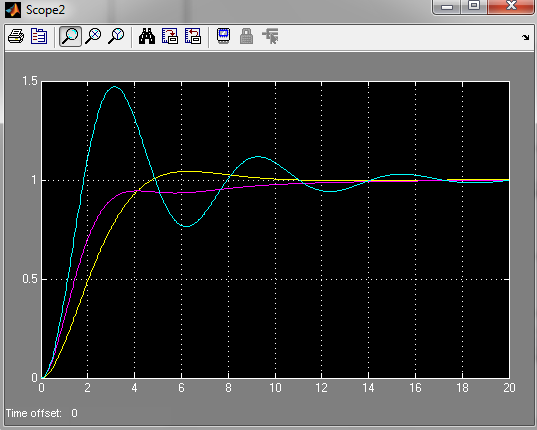
Синий график – нижняя модель.
Фиолетовый график – средняя модель.
4.
Фиолетовый график – нижняя модель.
Синий график – средняя модель.
4. Содержание отчета
4.1. Название и цель работы.
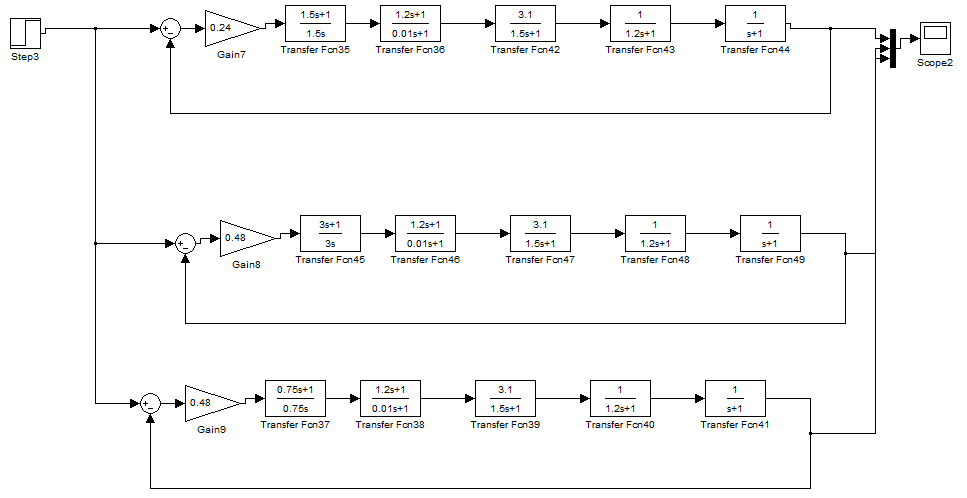
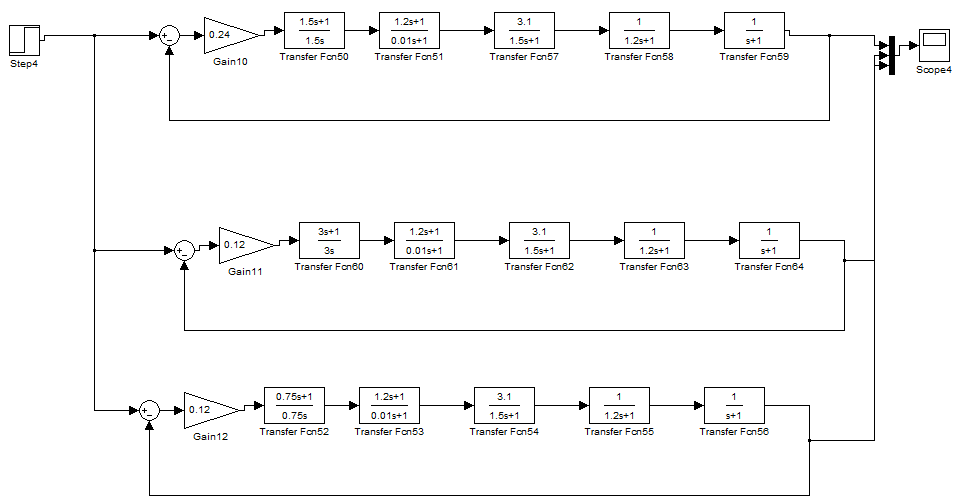
4.2. Структурная схема исследуемой АСР и параметры объекта регулирования по заданному варианту.
4.3. Передаточные функции, формулы расчета параметров настройки ПИ- и ПИД-регуляторов и численные значения параметров настройки.
4.4. Графики переходных процессов в замкнутой АСР с И-, ПИ- и ПИД-регуляторами при отработке задающих и возмущающих воздействий.
4.5. Графики переходных процессов в замкнутой АСР с ПИ-регулятором и вариациях параметров его настроек группами по 4-м вариантам эксперимента.
4.6. Выводы по лабораторной работе.