

28/29. Сопряжение ас овд со спутниковыми системами навигации gnss (Глонасс, gps).
Р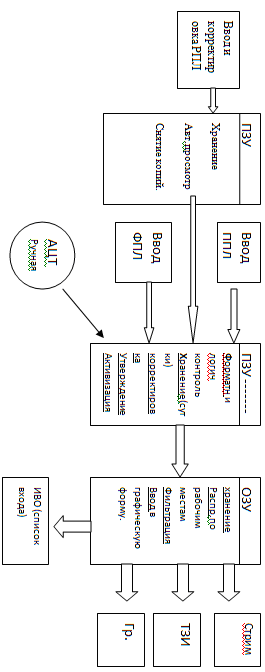 азличают
АЗН-К – контрактное, когда координатная
информация от объекта передаётся одному
конкретному наблюдателю (диспетчеру),
а также АЗН-В – вещательное, когда
информация транслируется в окружающее
пространство. В этом случае координатная
информация может быть воспринята любым
наблюдателем, в том числе диспетчером,
а также экипажами других ВС для наблюдения
взаимного местоположения с целью
предотвращения столкновений (TIS).
азличают
АЗН-К – контрактное, когда координатная
информация от объекта передаётся одному
конкретному наблюдателю (диспетчеру),
а также АЗН-В – вещательное, когда
информация транслируется в окружающее
пространство. В этом случае координатная
информация может быть воспринята любым
наблюдателем, в том числе диспетчером,
а также экипажами других ВС для наблюдения
взаимного местоположения с целью
предотвращения столкновений (TIS).
Необходимо ознакомится с влиянием АЗН на процессы УВД, с этапами и проблемами внедрения АЗН-В в России.
В связи с развитием спутниковых систем точного позиционирования GPS, ГЛОНАСС и др. экспертами ИКАО предложен и уже находит воплощение новый способ наблюдения за подвижными объектами – автоматическое зависимое наблюдение (АЗН). Принцип АЗН заключается в определении точного местоположения подвижного объекта в пространстве с помощью бортовой навигационной аппаратуры и трансляции координатной информации наблюдателю. Для передачи этой информации могут быть использованы радиоканалы ВЧ и ОВЧ связи, канал спутниковой связи и канал ответа вторичной радиолокации режима «S». Точность разная у разных источников и разный темп (асинхронный темп). Должен быть сервер АЗН который принимает эту информацию(в сообщениях АЗН содержится позывной,местоположение,высоту и ТАЙМ СТЕМП(отметка вермени текущего положения)). В РА излучение чаще чем в океаническом секторе УВД.
12. Обработка плановой информации в ас увд.
Определяется документом ИКАО №4444.
Источники плановой информации:-Сети AFTN (телеграфные) – ППЛ через Центр Коммутации сообщений.- Библиотека повторяющихся полетов (РПЛ).-Рабочее место диспетчера АДП.-Рабочее место диспетчеров РЛК и процедурного контроля.При вводе плановой информации производится форматный и логический контроль (в АС УВД). Форматный – правильность введения информации (буквенная, цифровая).
Логический – логическая проверка маршрута полета, эшелона. Автоматизация планирования ВД должна осуществляться в соответствии с рекомендациями ИКАО, изложенными в европейском аэронавигационном плане. При этом решаются следующие задачи:
создание единого центра для ведения общей базы аэронавигационных данных о структуре ВП России;-планирование и координация ИВП России и сопредельных государств;-выбор наиболее экономичных маршрутов и профилей полётов с учётом интересов пользователей ВП;
-устранение перегрузок зон и секторов УВД путём рационального планирования и упорядочения потоков ВС; -осуществление процессов планирования ВД и расчёта АНС с использованием современных средств цифровой связи; -обмен планами полётов и аэронавигационной информацией между элементами системы УВД России, сопредельных государств и органами организации ПВД европейского региона ИКАО; -взаимодействие с военными системами ОрВД России. Обработка плановой информации производится в подсистеме FDP АС УВД. Источниками плановой информации при формировании суточного плана полётов в АС УВД являются: -расписание движения ВС (РПЛ). Расписание, хранящееся в ПЗУ вычислительного комплекса, анализируется один раз в сутки, создаётся выборка рейсов на следующие сутки (на завтра). Снятые копии отправляются для формирования суточного плана;-предварительные планы (ППЛ) полётов от удалённых центров УВД или от авиакомпаний принимаются по сети AFTN и вводятся в систему через АРМ оператора AFTN;-предварительные планы (ППЛ) полётов от диспетчера АДП данного аэродрома;-планы полётов (ФПЛ), ведённые в систему с рабочих мест диспетчеров непосредственного радиолокационного УВД или диспетчеров процедурного контроля.