8. Сглаживание траектории. Экстраполяция.
Происходит но основе 2 постулатов: - все движение плавно, погрешности изменения координат являются независимыми величинами. Для сглаживания используется скользящие сглаживание. Суть: - новое положение ВС определяется прежним с учётом обновлений. – влияние прежних результатов на предыдущих обзорах должен со временем уменьшаться ( иначе прежний будет отставать от действительного маневрирования ВС), но не очень сильно, т.к. ввиду погрешностей получим ломанную линию.
^ ^ ^
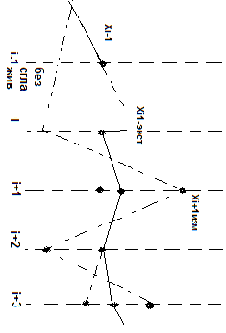
Хi= Хi экстр +R(Хiизм -Хэкстр )
^ ^ ^
Vi =Vi-1 +Rv (Хiизм -Хi экстр /Тобз)
^ ^ ^
Хiэкст =Хi-1 +Vi-1 *Tобз
Рекуррентные алгоритмы
К и Кv коэффициенты могут меняться в зависимости от числа обзоров
К=2(2п-1)/п(п+1)
Кv=6/п(п+1) п<=15
П |
1 |
,, |
5 |
,,, |
10 |
,, |
15 |
к |
1 |
,, |
0,6 |
,,, |
0,38 |
,, |
0,24 |
По мере развития траектории (п) влияние новойРЛ инф. уменьшается.
Экстраполяция производится в рассчёте на определенный, ввод. Дисп., промежуток времени ( 1-5мин) иногда 10 мин.
Длина вектора определяется:- w.T’экст. масштабом. Вектор экстраполяции направлен по касательной к сглаженной траектории ВС. Необходим для прогнозирования ПК С.
Хэкст=W*Tэкст.
Вектор дальности длина определяется не заказанным диспетчером Т, а выбранным расстоянием и масштабом отображения.
15. Применение экспертных систем при автоматизации увд.
Экспертные оценки это новый этап развития автоматизации когда проявляются элементы искусственного интеллекта.
-статическая БД(х-ки ВС,нормы эшелонирования)
-динамическая БД(взаимное расположение ВС(меняется))
-мнение экспертов(база знаний)
сопоставление баз выбирается то решение которое соответствует мнению экспертов и оно применяется для поддержки принятия решения в критических ситуациях, но окончательное решение всегда за человеком
Пример: TCAS, Буран
6.Задачи вторичной обработки инф. Преобразование координат и пересчёт высоты.
1- преобразование координат из полярной в прямоугольную ( если не произведено в АПОИ) 2-обнаружение начала траектории ВС (ввод в автосопровождение, оформуляривание, завязка трека) 3-сглаживание траектории цели 4-оценка параметров траектории (W,курса) 5-экстраполяции положения (предвидение) 6-формирование строба сопровождения 7- обнаружение ПКС,КС 8-пересчёт высоты в аэроузловых,а/д QNE-QFE. обнаружение окончания траектории движения каждого ВС (срыв автосопровождения и автоматический перевод информации из формуляра сопровождения в список потерь);
Преобразование координат.
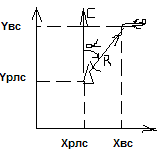
Хвс=Хрлс+Rsinα
Yвс=Урлс+Rcosα
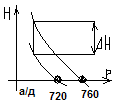
Преобразование высоты.
QNE (760) в QFE. Необходимые величины вводит ДПК в систему ( Р а/д, Нпер.). 0900=9000 ( относит Р=760) А065 = 650м ( отн.уровня ВПП ) (ВС находится ниже высоты пересчёта). Высота перечёта = Нпер.-150м.