

2. Обобщенные структурные схемы АСПВД, АС непосредственного УВД и АС управления наземным движением ВС; их особенности и решаемые задачи.
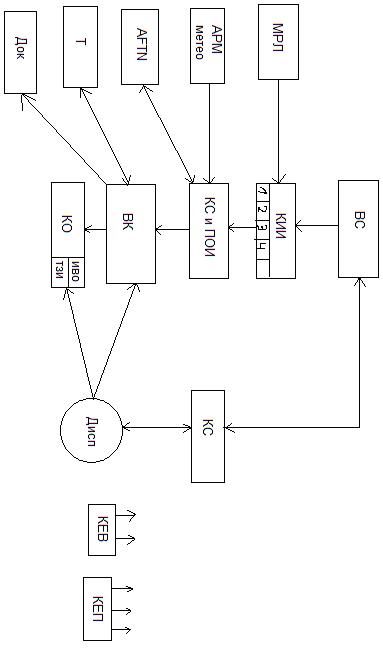
Структура АСУВД
3. Вычислительные комплексы асувд; классификация и решаемые ими задачи.
Вычислительный комплекс (ВК) является одной из главных составных частей АС УВД. Он представляет собой совокупность технических средств, включающих в себя, как правило, несколько ЭВМ или процессоров, общесистемное базовое и прикладное программное обеспечение. ВК это сложная управляющая система, предназначенная для обработки плановой (FDP) и радиолокационной (координатной) информации (RDP).
Основными задачами ВК являются:
сбор, хранение и своевременное распределение плановой информации;
форматный и логический контроль вводимой плановой информации, её анализ, выявление конфликтных ситуаций по планам полётов в критических точках ВП, расчёт временных параметров планов, их автоматическая активизация и отображение в удобной форме;
вторичная и третичная обработка радиолокационной и другой координатной (АЗН) информации;
обнаружение потенциальных конфликтных ситуаций;
отображение координатной (трековой) информации в удобной форме;
приём и выполнение команд диспетчеров от клавиатуры и других органов управления (ДПК, манипулятор «мышь» и т.п.);
подготовка и выдача информации для документирования;
имитация моделей ВО для тренировки диспетчеров.
Различают многомашинные, многопроцессорные, сосредоточенные и распределённые ВК, а также ВК смешанной структуры. Большинство современных средств автоматизации УВД строится на основе локальной вычислительной сети.
Этапы обработки радиолокационной информации в асовд и их содержание.
Цифровая обработка радиолокационной информации производится в три этапа: первичная, вторичная и третичная обработка.
Под первичной обработкой радиолокационных сигналов понимают извлечение из них информации о местоположении объектов наблюдения. К задачам первичной цифровой обработки относятся:
обнаружение радиолокационного сигнала на фоне помех;
измерение координат (азимута и дальности) наблюдаемых объектов и преобразование данных в цифровой двоичный код;
для ВРЛ дополнительно решается задача декодирования полётной информации от ответчика;
объединение цифровых данных от ПРЛ и ВРЛ в информационный пакет для последующей передачи в центр УВД.
П ервичная
обработка производится в АПОИ (экстракторе)
на радиолокационной позиции. Она
заключается в предварительном
амплитудно-временном преобразовании
сигналов радиоприёмника РЛС в двоичную
последовательность. В простейшем виде
используется бинарное квантование
(символы «1» и «0»). В последующем
производится обнаружение полезного
сигнала путём накопления и сравнения
с порогом по критерию «k
из m».
Ознакомиться с практической реализацией
метода «скользящего окна». Затем
осуществляется цифровое измерение
азимута и дальности для каждого
обнаруженного полезного сигнала,
кодирование этих значений и объединение
информации первичной и вторичной РЛС.
Такие цифровые посылки могут без
заметных потерь передаваться по
узкополосным линиям связи на значительные
расстояния в удалённые центры УВД для
вторичной и третичной обработки в
вычислительных комплексах АС УВД.
Вторичная.
Параметры
конфликтных ситуаций устанавливаются
различными в различных секторах УВД,
поскольку в этих секторах установлены
различные нормы эшелонирования.
ервичная
обработка производится в АПОИ (экстракторе)
на радиолокационной позиции. Она
заключается в предварительном
амплитудно-временном преобразовании
сигналов радиоприёмника РЛС в двоичную
последовательность. В простейшем виде
используется бинарное квантование
(символы «1» и «0»). В последующем
производится обнаружение полезного
сигнала путём накопления и сравнения
с порогом по критерию «k
из m».
Ознакомиться с практической реализацией
метода «скользящего окна». Затем
осуществляется цифровое измерение
азимута и дальности для каждого
обнаруженного полезного сигнала,
кодирование этих значений и объединение
информации первичной и вторичной РЛС.
Такие цифровые посылки могут без
заметных потерь передаваться по
узкополосным линиям связи на значительные
расстояния в удалённые центры УВД для
вторичной и третичной обработки в
вычислительных комплексах АС УВД.
Вторичная.
Параметры
конфликтных ситуаций устанавливаются
различными в различных секторах УВД,
поскольку в этих секторах установлены
различные нормы эшелонирования.
Вторичная или межобзорная обработка радиолокационной информации производится в вычислительном комплексе АС УВД, в частности в его части, имеющей обозначение RDP. Целью вторичной обработки является получение информации о траекториях и параметрах движения ВС для УВД.
Вторичная обработка радиолокационной информации должна производиться в масштабе реального времени, т.е. без существенного запаздывания отображения воздушной обстановки по отношению к реальному перемещению ВС.
Задачами вторичной обработки радиолокационной информации являются:
преобразование координат ВС, поступивших от РЛС, из полярной системы в прямоугольную систему координат (если это не реализовано на этапе первичной обработки в АПОИ);
обнаружение начала траектории движения каждого ВС («завязка трека» или автоматический ввод в автосопровождение);
обнаружение окончания траектории движения каждого ВС (срыв автосопровождения и автоматический перевод информации из формуляра сопровождения в список потерь);
сглаживание траекторий движения ВС (на основе рекуррентных алгоритмов фильтрации Калмана);
формирование стробов для автосопровождения ВС;
расчёт параметров движения ВС по сглаженной траектории (путевой скорости, курса, а при наличии боковой составляющей ветра – путевого угла);
экстраполяция положения ВС (построение вектора упреждённого положения ВС – вектора экстраполяции);
обнаружение и отображение на ИВО потенциально конфликтных и конфликтных ситуаций различных видов;
пересчёт барометрической высоты ВС, ответчики которых работают в режиме RBS, из отсчётов по уровню стандартного давления (QNE) в отсчёты по уровню атмосферного давления на аэродроме (QFE). Эта задача реализуется только в аэродромных и аэроузловых АС УВД.
Третичная. (мультисенсорная; мультирадарная, мозаичное фильтрование).
Необходимость третичной обработки радиолокационной информации (мультирадарного или мультисенсорного наблюдения) возникает в том случае, когда в вычислительный комплекс АС УВД поступает координатная информация одновременно от нескольких РЛС или других источников. Это имело место в аэроузловых и трассовых АС УВД, в которых для покрытия большой территории устанавливаются несколько РЛС с перекрытием их зон обнаружения. В связи с внедрением АЗН проблема мультисенсорного наблюдения становится ещё более актуальной. При реализации мультисенсорного наблюдения необходимо обратить внимание на следующие проблемы:
оценка достоверности координатной информации, получаемой от различных сенсоров (датчиков);
пересчёт измерений в единую систему координат;
приведение измерений к единому времени;
построение интегрированных траекторий и обеспечение их непрерывности (стыковки).
Мозаичное фильтрование является наиболее простым и хорошо известным способом третичной обработки. Он состоит в разведении зоны ответственности на отдельные непересекающиеся области (домены), где используются замеры, полученные от одного определенного радара, а остальные игнорируются. В каждом домене предпочтение отдается радиолокатору с лучшими характеристиками обнаружения. Очевидным недостатком мозаичного метода является отказ от совместной обработки координат в зонах перекрытия, так что этот резерв улучшения характеристик сопровождения остается не задействованным.